|
Содержание Главная (библиотека)
Предыдущий § Следущий
3-23. Асинхронные исполнительные двигатели
Для осуществления автоматического управления, регулирования или контроля во многих случаях требуется преобразование «электрического сигнала» в механическое вращение. При этом применяются исполнительные двигатели, в качестве которых часто используются асинхронные двигатели с двумя обмотками на статоре и короткозамкнутым ротором. Обмотки в пазах статора размещаются так же, как
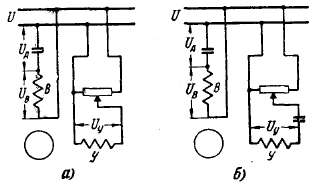 Рис. 3-98. Схемы включения асинхронных исполнительных двигателей.
в однофазном двигателе, имеющем главную и вспомогательную фазы.
Обычные схемы включения асинхронных исполнительных двигателей приведены на рис. 3-98. Здесь одна из фаз статора называется обмоткой возбуждения (В), а другая фаза — обмоткой управления (У). Такие схемы позволяют пускать в ход и останавливать двигатель и регулировать его скорость вращения путем изменения напряжения Uy на обмотке управления; при этом обмотка возбуждения остается приключенной к сети.
В отличие от обычных асинхронных двигателей к исполнительным асинхронным двигателям предъявляется ряд особых требований:
1) отсутствие «самохода» (вращения двигателя после снятия сигнала управления);
2) изменение скорости вращения двигателя в широких пределах при изменении напряжения управления Uy по величине и фазе;
3) устойчивость работы при всех скоростях вращения;
4) большой начальный пусковой момент;
5) линейность регулировочных и механических характеристик;
6) малая мощность управления;
7) быстродействие.
Под самоходом двигателя понимается его вращение после снятия сигнала (напряжения) с обмотки управления. Такого вращения (самохода) не должно быть. Двигатель должен быстро останавливаться после отключения обмотки управления. В противном случае он перестает быть управляемым. Для устранения самохода двигателя необходимо, чтобы обмотка
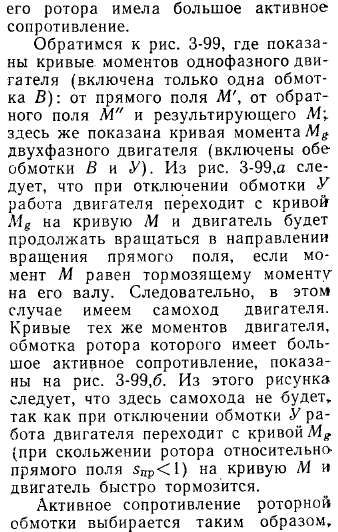 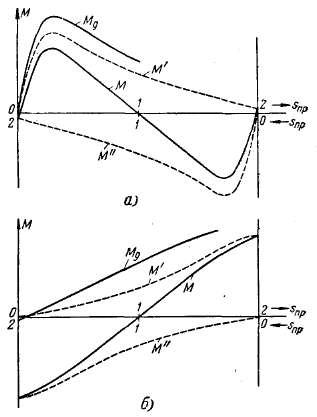 Рис. 3-99. Кривые моментов двигателя при различных активных сопротивлениях роторной обмотки. а —при малом сопротивлении; б — при большом сопротивлении.
главному потоку, проходящему через зазор. Он насаживается на цилиндрический выступ щита.
Полый ротор 3 представляет собой тонкостенный стакан, выполняемый обычно из алюминиевого сплава. Дно стакана жестко укрепляется на валу 7. Толщина его стенки колеблется от 0,2 до 1 мм. Такой ротор имеет очень небольшой момент инерции, что во многих случаях и требуется от исполнительного двигателя.
Зазором в двигателе следует считать зазор между внешним и внутренним статорами. Он относительно велик: 0,5—1,5 мм. Вследствие этого возрастают намагничивающие токи обмоток, что приводит к увеличению электрических потерь в них. Кроме того, большие электрические потери возникают в роторе. Поэтому к. п. д. рассматриваемого двигателя имеет низкие значения. Из-за больших потерь приходится увеличивать размеры двигателя, чтобы получились достаточные поверхности охлаждения.
Вращающий момент двигателя создается в результате взаимодействия вращающегося поля и вихревых токов, наведенных им в цилиндрической части ротора. С некоторым приближением можно контуры вихревых токов заменить эквивалентной клеткой. Активное сопротивление r2 такой клетки получается большим, тогда как ее индуктивное сопротивление х2 невелико: х2≈(0,05÷0,1)r2. При этих условиях в большой степени удовлетворяются указанные требования, предъявляемые к исполнительному двигателю.
В качестве исполнительного двигателя применяется также асинхронный двигатель с ферромагнитным полым ротором. Такой ротор выполняется в виде полого цилиндра из стали при толщине его стенки от 0,5 до 3 мм. Здесь внутренний статор не требуется, так как поток будет проходить по стенкам цилиндра. На торцах ротора укрепляются диски. Сквозь центральные отверстия дисков проходит жестко связанный с ними вал. Следовательно, конструкция получается более простой, чем в предыдущем случае.
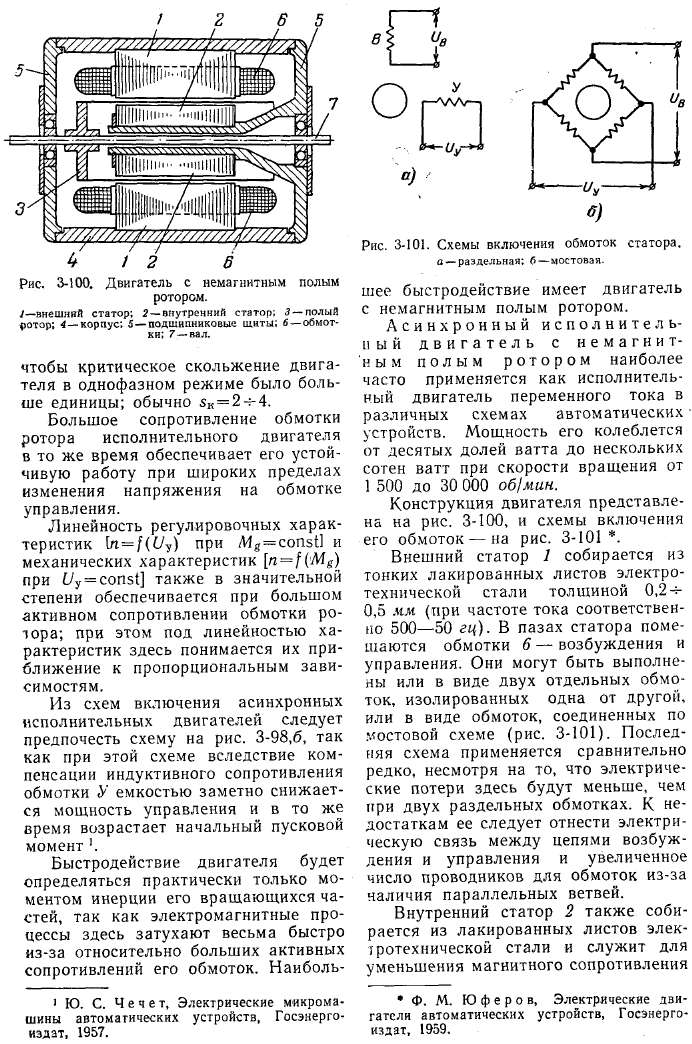
Выполнение его обмоток статора и схемы их включения такие же, как
у двигателя с немагнитным полым ротором (рис. 3-98).
Воздушный зазор между статором и ротором в рассматриваемом двигателе берется небольшой (0,2—0,3 мм); однако намагничивающие токи его обмоток почти такие же, как у двигателей с немагнитным полым ротором. Объясняется это тем, что магнитная проводимость ферромагнитного полого ротора вследствие малой его. толщины незначительна.
Активное сопротивление r2 такого ротора велико, так как удельное сопротивление стали значительно больше, чем меди и алюминия, и, кроме того, здесь резко сказывается эффект вытеснения тока к внешней цилиндрической поверхности ротора, особенно при большой частоте f2=sf1.
С целью уменьшения r2 иногда производится омеднение ротора: гальваническим путем внешняя цилиндрическая поверхность ротора покрывается слоем меди толщиной 0,05—0,1 мм, а торцовые поверхности — слоем меди толщиной до 1 мм. Однако при этом возрастает зазор (от статора до стальной поверхности ротора). Поэтому в ряде случаев ограничиваются омеднением только торцовых поверхностей ротора.
По быстродействию двигатель уступает двигателю с немагнитным полым ротором.
Находит себе применение в качестве исполнительного двигателя и короткозамкнутый двигатель с беличьей клеткой на роторе, имеющей большое активное сопротивление. Его обмотки статора включаются также по схемам, приведенным на рис. 3-98.
Следует еще рассмотреть асинхронный двигатель с массивным ферромагнитным ротором, который применяется в качестве исполнительного, когда приходится приводить во вращение тяжелые маховые массы и когда, следовательно, собственный момент инерции двигателя имеет относительно малое значение. Характеристики этого двигателя несколько лучше, чем у двигателя с ферромагнитным полым ротором. Здесь также иногда применяется омеднение ротора.
Конструкция массивного ротора — более простая и механически значи-
тельно более прочная и надежная, чем полого ротора и ротора с беличьей клеткой, собранного из тонких листов. Этим и объясняется, что двигатели с массивным стальным ротором в настоящее время выполняются на очень большие скорости вращения (до 120 000—150 000 об/мин).
К недостаткам рассматриваемого двигателя, препятствующим его применению взамен обычного короткоза-мкнутого двигателя, следует отнести относительно низкий максимальный момент Мм из-за повышенного индуктивного сопротивления х2 ротора, большие потери в роторе и, следовательно, низкий к. п. д.
Содержание Главная (библиотека)
Предыдущий § Следущий
| 