|
Содержание
Предыдущий § Следующий
Глава тридцать седьмая СИНХРОННЫЕ ДВИГАТЕЛИ И КОМПЕНСАТОРЫ
§ 37-1. Синхронные двигатели
Применение синхронных двигателей. Основные вопросы, относящиеся к двигательному режиму работы синхронной машины, уже освещались в предыдущих главах учебника. Ниже дополнительно
рассматриваются некоторые общие вопросы, относящиеся к синхронным двигателям.
Синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что благодаря возбуждению постоянным током они могут работать с cos ср = 1 и не потребляют при этом реактивной мощности из сети, а при работе с перевозбуждением даже отдают реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшаются падение напряжения и потери в ней, а также повышается коэффициент мощности генераторов, работающих на электростанциях.
Максимальный момент синхронного двигателя пропорционален U, a у асинхронного двигателя U2.
Поэтому при понижении напряжения синхронный двигатель сохраняет большую нагрузочную способность. Кроме того, использование возможности увеличения тока возбуждения синхронных двигателей позволяет увеличивать их надежность работы при аварийных понижениях напряжения в сети и улучшать в этих случаях условия работы энергосистемы в целом. Вследствие большей величины воздушного зазора добавочные потери в стали и в клетке ротора синхронных двигателей меньше, чем у асинхронных, благодаря чему к. п. д. синхронных двигателей обычно выше.
С другой стороны, конструкция синхронных двигателей сложнее, чем короткозамкнутых асинхронных двигателей, и, кроме того, синхронные двигатели должны иметь возбудитель или иное устройство для питания обмотки возбуждения постоянным током. Вследствие этого синхронные двигатели в большинстве случаев дороже асинхронных двигателей с короткозамкнутым ротором. Пуск и регулирование скорости вращения синхронных двигателей также сложнее.
Тем не менее, преимущество синхронных двигателей настолько велико, что при Рн > 200 -н 300 кет их целесообразно применять всюду, где не требуется частых пусков и остановок и регулирования скорости вращения (двигатель-генераторы, мощные насосы, вентиляторы, компрессоры, мельницы, дробилки и пр.). Согласно исследованиям Л. В. Литвака и И. А. Сыромятникова, синхронные двигатели с cos фн = 1 по своей стоимости и потерям энергии всегда имеют преимущество перед асинхронными двигателями, снабженными конденсаторными батареями для компенсации коэффициента мощности до cos ф = 1. При Рн > 300 кет выгодно использовать синхронные двигатели с cos cpH = 0,9 (перевозбуждение) и при Рн > 1000 кет — с cos фн = 0,8.
Применение синхронных двигателей беспрерывно расширяется, и они строятся на мощности до Рн = 50 000 кет.
В табл. 37-1 приведены данные некоторых синхронных двигателей отечественного производства.
Таблица 37-1 Данные синхронных двигателей
|
Тип
|
Рп-
кет
|
в
|
об/мин
|
|
созфн
|
'п '„
|
Мп Мш
|
Мп
|
Мт Мп
|
Вес, т
|
|
МС321
|
640
|
3000
|
1000
|
0,936
|
0,8
|
4,6
|
1,2
|
0,9
|
2,1
|
5,2
|
|
МС322-16/6
|
2700
|
6000
|
1000
|
0,964
|
0,8
|
6,1
|
1,2
|
1,4
|
2,3
|
13,0
|
|
МС321-6/10
|
370
|
3000
|
600
|
0,923
|
0,8
|
4,8
|
1,7
|
0,85
|
2,2
|
5,4
|
|
МС324-20/10
|
6550
|
6000
|
600
|
0,968
|
0,8
|
5,5
|
1,2
|
1,1
|
2,3
|
38,4
|
|
МС322-4-20
|
175
|
3000
|
300
|
0,875
|
0,8
|
4,3
|
1,6
|
0,65
|
2,7
|
5,1
|
|
МС324-12/20
|
1970
|
6000
|
300
|
0,944
|
0,8
|
4,5
|
1,0
|
0,90
|
2,3
|
27,0
|
|
МС324-4/36
|
310
|
3000
|
167
|
0,880
|
0,8
|
2,4
|
0,85
|
0,35
|
2,2
|
9,8
|
|
СТМ-6000-2
|
6000
|
6000
|
3000
|
0,967
|
0,9
|
8,3
|
2,4
|
0,84
|
2,4
|
18,8
|
Способы пуска синхронных двигателей.
IB подавляющем большинстве случаев применяется асинхронный пуск синхронных двигателей (см. § 36-1 и 36-2).
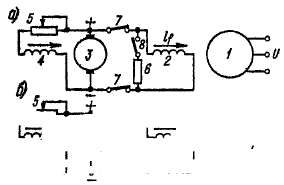
Обычно синхронные двигатели имеют на своем валу возбудитель в виде генератора постоянного тока параллельного возбуждения (рис. 37-1). При пуске по схеме рис. 37-1, а контакты 7 разомкнуты, а контакт 8 замкнут. При этом обмотка возбуждения двигателя 2 замкнута через сопротивление 6 и асинхронный пуск происходит в наиболее благоприятных условиях. В конце асинхронного пуска, при s » 0,05, срабатывает частотное реле, обмотка которого (на рис. 37-1, а не показана) подключена к сопротивлению 6, и включает контактор цепи возбуждения. Контакты 7 контактора при этом замыкаются, а контакт 8 размыкается. В результате в обмотку 2 подается ток возбуждения и двигатель втягивается в синхронизм.
Втягивание синхронного двигателя в синхронизм всегда обеспечено, если при асинхронном пуске скольжение в установившемся асинхронном режиме без возбуждения не превышает величины
где km — кратность максимального момента в синхронном режиме при номинальном токе возбуждения ifH; Рн — номинальная мощность, кет ;ifC — ток возбуждения при синхронизации; GD2 — маховой момент двигателя и соединенного с ним механизма, кг -м2; па — номинальная скорость вращения двигателя, об/мин.

Пуск по схеме рис. 37-1, а отличается определенной сложностью. Поэтому в последнее время все чаще применяется схема рис. 37-1, б с наглухо присоединенным возбудителем. При этом по цепи якоря 3 при пуске протекает переменный ток, который, однако, не причиняет вреда. При п = (0,6 -ь 0,7) ян возбудитель возбуждается и возбуждает синхронный двигатель, благодаря чему при приближении к синхронной скорости двигатель втягивается в синхронизм.
Пуск по схеме рис. 37-1, б происходит в менее благоприятных условиях. Во-первых, двигатель возбуждается слишком рано
и при этом возникает дополнительный тормозящий момент на валу Мк (см. §36-2). Во-вторых, в данном случае по сравнению со схемой рис. 37-1, а кривая асинхронного
момента имеет менее благо-
Г*~ /*\ I If „ /"""V"0 приятный вид (см. рис. 36-5). *^"lCO iF^l ( 1 \~°1} Тем не менее, схема рис. 37-1, б обеспечивает надежное втяги-вание двигателя в синхро-
низм, если момент нагрузки на валу Л4СТ при п яг пн не превышает (0,4 -*- 0,5) Мн. Путем совершенствования пусковой обмотки двигателя
Рис. 37-1 Схемы цепи возбуждения синхронного двигателя с машинными возбудителями при пуска-с разрядным сопротивлением (о) и с наглухо приключенным возбудителем (б)
/ — якорь двигателя, 2 — обмотка возбуждения двигателя, 3 — якорь возбудителя, 4 — об мотка возбуждения возбудителя, 5 — реостат возбуждения возбудителя, 6 — разрядное сопротивление, 7 и 8 — контакты контактора или автомата гашения поля
можно достичь надежного втягивания в синхронизм при М„ = Мп. Пуск по схеме рис. 37-1, б по своей простоте приближается к пуску ко-
роткозамкнутого асинхронного двигателя и поэтому находит в последние годы все более широкое применение.
Обычно производится прямой асинхронный пуск синхронных двигателей путем включения на полное напряжение сети. При тяжелых условиях пуска (большие падения напряжения в сети и опасность перегрева пусковой обмотки или массивного ротора) производится реакторный или автотрансформаторный пуск при пониженном напряжении, как и у короткозамкнутых асинхронных двигателей (см. § 28-1).
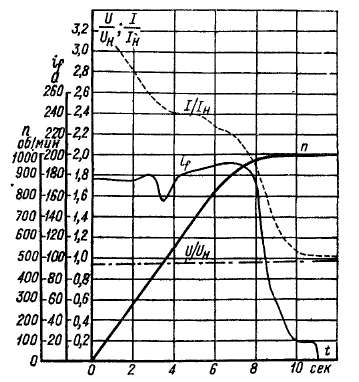
На рис. 37-2 показаны кривые изменения токов обмоток якоря / и возбуждения if, а также напряжения U и скорости вращения п при прямом асинхронном пуске мощного двигателя (Рв — 1500 кет, £/н = 6,0 га, пп — 1000 об/мин) с наглухо приключенным возбудителем на холостом ходу. При п = 500 об!мин в кривой i} заметен небольшой провал, обусловленный одноосным эффектом. ДвигатеЛь
втянулся в синхронизм через 11 сек под воздействием реактивного момента. Процесс, связанный с включением постоянного тока возбуждения, на рис. 37-2 не представлен.
Кроме асинхронного пуска, в отдельных случаях возможны также некоторые другие способы пуска. Например, иногда можно привести синхронный двигатель во вращение на холостом ходу
Рис. 37-2. Кривые, характеризующие процесс прямого асинхронного пуска синхронного двигателя сР„= 1500 кет с наглухо приключенным возбудителем
с помощью соединенной с ним машины (например, в агрегатах «синхронный двигатель — генератор постоянного тока»). При этом можно применить те же способы синхронизации с сетью, как и для синхронных генераторов (см. § 35-1). В некоторых случаях возможен частотный пуск, когда двигатель питается от отдельного синхронного генератора и частота последнего плавно поднимается от нуля. При этом синхронный двигатель приходит в синхронное вращение уже при весьма малой скорости. Обмотки возбуждения генератора и двигателя в этом случае необходимо питать от посторонних источников. Частотный пуск происходит наиболее благоприятно при условии, когда ток возбуждения генератора в начале пуска примерно равен номинальному, а ток возбуждения двигателя равен
по характеристике холостого хода току возбуждения при U m Ua и п = пИ.
В последние годы внедряются системы возбуждения синхронных двигателей с питанием обмотки возбуждения от сети переменного тока через полупроводниковые выпрямители.
Векторные диаграммы синхронных двигателей можно изображать двояким образом (рис. 37-3). На диаграмме рис. 37-3, а ток /, как и у генератора, рассматривается как отдаваемый в сеть. Проекция этого тока на направление U отрицательна, что свидетельствует
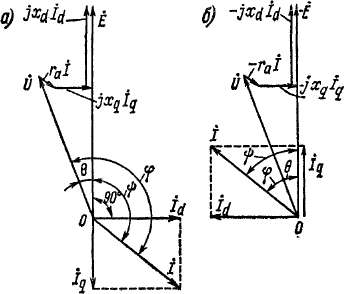 Рис 37-3 Два вида векторных диаграмм перевозбужденного явнополюсного синхронного двигателя
о том, что активная составляющая тока в действительности потребляется из сети.
Если на диаграмме рис. 37-3, а вектор тока повернуть на 180° и изменить знак у вектора Е, так как положительные направления / и Е должны изменяться одновременно, то получим диаграмму рис. 37-3, б, на которой ток / надо рассматривать как потребляемый из сети. Проекция / на направление U положительна, что указывает на потребление активного тока из сети.
Из рис. 37-3, а следует, что отдаваемая в сеть активная мощность
Р ~ mil I cos ф<0,
а в соответствии с рис 37-3, б потребляемая из сети активная мощность
P = mill cos<p >0.
Диаграммы рис. 37-3 соответствуют перевозбужденному двигателю, и такой двигатель, согласно рис. 37-3, а, отдает в сеть отстающий ток, а согласно рис. 37-3, б, потребляет из сети опережающий ток. Очевидно, что обе трактовки равноценны.
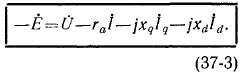
По рис. 37-3, а, э. д. с. Ё равна О плюс падения напряжения в двигателе:
(37-2)
по рис. 37-3, б, э. д. с. £ с обратным знаком равна напряжению сети О минус падения напряжения в двигателе:
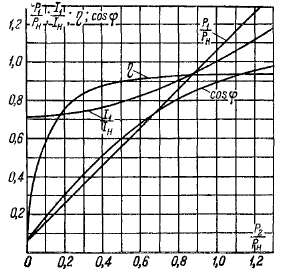
Рис. 37-4. Рабочие характеристики явно-полюсного синхронного дзигателя с Рн = = 560 кет, UH = 6000 в, / = 50 гц, пн = 600 об/мин, cos фн = 0,9 (перевозбуждение)
Если рассматривается только двигательный режим синхронной машины, то более удобно пользоваться диаграммой рис. 37-3, б.
Рабочие характеристики синхронного двигателя мощностью Рн = 560 кет при 0 = Un, f = Д, и if — iJH = const изображены в относительных единицах на рис. 37-4. Двигатель работает с перевозбуждением, его cos ф с уменьшением полезной мощности Р2 также уменьшается, а отдаваемая в сеть реактивная мощность Q увеличивается. Отсюда следует, что перевозбужденные недогруженные синхронные двигатели в отличие от асинхронных способствуют улучшению коэффициента мощности сети.
§ 37-2. Синхронные компенсаторы
Как уже указывалось в § 35-2, синхронные компенсаторы предназначаются для компенсации коэффициента мощности сети и поддержания нормального уровня напряжения сети в районах сосредоточения потребительских нагрузок. Нормальным является перевозбужденный режим работы синхронного компенсатора, когда он отдает в сеть реактивную мощность (рис. 35-5, а).
В связи с этим компенсаторы, как и служащие для этих же целей батареи конденсаторов, устанавливаемые на потребительских
подстанциях, называют также генераторами реактивной мощности. Однако в периоды спада потребительских нагрузок (например, ночью) нередко возникает необходимость работы синхронных компенсаторов также в недовозбужденном режиме, когда они потребляют из сети индуктивный ток и реактивную мощность (см. рис. 35-5, б), так как в этих случаях напряжение сети стремится возрасти и для поддержания его на нормальном уровне необходимо загрузить сеть индуктивными токами, вызывающими в ней дополнительные падения напряжения. Для этого каждый синхронный компенсатор снабжается автоматическим регулятором возбуждения или напряжения, который регулирует величину его тока возбуждения так, что напряжение на зажимах компенсатора остается постоянным.
Синхронные компенсаторы лишены приводных двигателей и с точки зрения режима своей работы в сущности являются синхронными двигателями, работающими на холостом ходу. Поэтому в отличие от случая, которому соответствуют векторные диаграммы рис. 35-5, аи б, синхронные компенсаторы загружены также небольшим активным током и потребляют из сети активную мощность для покрытия своих потерь. Компенсаторы строятся на мощность до SH — 100 000 кв-а w. имеют явнополюсную конструкцию, обычно с 2р = 6 или 8. Мощные компенсаторы имеют водородное охлаждение.
Для осуществления асинхронного пуска все синхронные компенсаторы снабжаются пусковыми обмотками в полюсных наконечниках или их полюсы делаются массивными. При этом используется способ прямого, а в необходимых случаях — способ реакторного пуска. В некоторых случаях мощные компенсаторы пускаются в ход также с помощью пусковых фазных асинхронных двигателей, укрепляемых с ними на одном валу. Для синхронизации с сетью при этом обычно используется метод самосинхронизации.
Так как синхронные компенсаторы не развивают активной мощности, то вопрос о статической устойчивости работы (см. § 35-3 и 35-4) для них теряет остроту. Поэтому они изготовляются с меньшим воздушным зазором, чем генераторы и двигатели, и соответственно этому величины xd и xq у них больше (см. табл. 32-1). Уменьшение зазора позволяет облегчить обмотку возбуждения и удешевить машину.
Номинальная полная мощность синхронного компенсатора
Sn = mUJH (37-4)
соответствует его работе с перевозбуждением. Наибольшие значения тока и мощности в недовозбужденном режиме получаются при работе в реактивном режиме с if — 0 и Е = 0. Если пренебречь потерями, то, согласно выражению (35-2), при этом

и соответствующая полная мощность
 В большинстве случаев в недовозбужденном режиме требуются меньшие мощности, чем в перевозбужденном, и указанные значения отношения (37-7) удовлетворяют эксплуатационным требованиям, но в некоторых случаях необходима большая мощность SHB. Этого можно достигнуть увеличением зазора, однако это приводит к удорожанию машины, и поэтому в последнее время ставится вопрос об использовании режима с отрицательным током возбуждения. При этом в выражении (37-5) Е < О, вследствие чего /нв увеличивается. Поскольку синхронный компенсатор по активной мощности загружен только потерями, то, согласно (35-4), он может работать устойчиво также с небольшим отрицательным возбуждением.
В ряде случаев в маловодные периоды для работы в режиме компенсаторов используются также генераторы гидроэлектростанций.
Содержание
Предыдущий § Следующий
| |
