|
Содержание
Предыдущий § Следующий
Глава тридцать шестая АСИНХРОННЫЕ РЕЖИМЫ И САМОВОЗБУЖДЕНИЕ СИНХРОННЫХ МАШИН
§ 36-1. Асинхронный режим невозбужденной синхронной машины
Предварительные замечания. В практике эксплуатации синхронных машин бывают случаи, когда отдельные машины выпадают из синхронизма и их роторы начинают вращаться относительно поля якоря (статора) асинхронно, с некоторым скольжением s. Это случается вследствие перегрузки машин, значительного падения напряжения в сети и потери возбуждения в результате каких-либо неисправностей в системе возбуждения или ошибочного срабатывания автомата гашения поля. Хотя невозбужденная явно-полюсная машина может развивать в синхронном режиме определенную мощность за счет реактивного момента, обычно эта мощность является недостаточной для покрытия нагрузки, и поэтому
явнополюсные машины при потере возбуждения чаще всего также выпадают из синхронизма.
При выпадении из синхронизма синхронная машина ведет себя подобно асинхронной, но ввиду различия конструкции ротора и наличия в общем случае тока возбуждения асинхронный режим синхронной машины имеет ряд особенностей.
Так как выпадение синхронных машин из синхронизма при авариях в энергосистемах происходит нередко, то выявление особенностей асинхронного режима и выяснение рациональных способов восстановления нормальных режимов работы имеют существенное практическое значение.
Широко применяется асинхронный пуск синхронных двигателей и компенсаторов, когда невозбужденная машина приключается к сети и ее скорость достигает почти синхронной скорости подобно асинхронному двигателю.
Асинхронные режимы работы невозбужденной и возбужденной синхронной машины существенным образом отличаются друг от друга. Асинхронный режим возбужденной синхронной машины является более сложным, и его можно рассматривать как наложение асинхронного режима невозбужденной асинхронной машины и режима установившегося короткого замыкания синхронного генератора.
Рассмотрим в первую очередь установившийся асинхронный режим работы невозбужденной синхронной машины.
Схемы замещения и их параметры. Если бы ротор синхронной машины обладал магнитной и электрической симметрией, то работа этой машины в асинхронном режиме без возбуждения ничем не отличалась бы от работы нормальной асинхронной машины. Однако в общем случае такой симметрии нет, и поэтому требуется самостоятельное рассмотрение вопроса.
Пусть обмотка статора (якоря) трехфазной синхронной машины включена в сеть. Токи якоря при этом создают вращающееся поле, перемещающееся относительно несимметричного ротора со скоростью скольжения. Для анализа явлений при несимметричном роторе разложим вращающееся относительно него поле на два пульсирующих поля (см. § 22-2), одно из которых действует по продольной (d), а другое — по поперечной (q) оси ротора. Эти поля пульсируют со сдвигом по фазе на 90°, и частота их пульсации f2 = sft. Кроме того, как и у асинхронной машины (см. § 24-2), рабочий процесс синхронной машины в асинхронном режиме можно привести к эквивалентному процессу при неподвижном роторе. Далее можно представить себе, что у такой машины с неподвижным ротором на статоре вместо трехфазной обмотки имеется эквивалентная двухфазная обмотка, причем одна фаза этой обмотки создает магнитный поток, пульсирую-
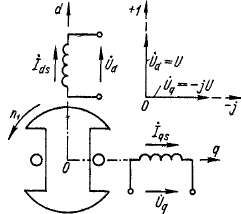 Рис. 36-1. Схема эквивалентной двухфазной синхронной машины при асинхронном режиме с заторможенным ротором
щий по продольной оси, а другая фаза — поток, пульсирующий по поперечной оси ротора (рис. 36-1), причем напряжения этих фаз U и jU сдвинуты по фазе на 90°. В подобной двухфазной системе взаимная индукция между фазами отсутствует и явления по осям d и q можно рассматривать независимо друг от друга. В результате вместо одной схемы замещения для симметричной асинхронной машины для синхронной машины получаем две схемы замещения (рис. 36-2) — одну для продольной и другую для поперечной оси.
При наличии успокоительной или пусковой обмотки (рис. 36-2, а и б) в схеме для продольной оси имеются две вторичные цепи, как и у двухклеточного асинхронного двигателя, а в схеме для поперечной оси — одна вторичная цепь. При отсутствии указанных обмоток (рис. 36-2, в и г) количество вторичных цепей уменьшается на единицу. На схемах рис. 36-2 принято га = 0 и не учитываются потери в стали статора. При наличии в цепи возбуждения добавочного сопротивления (например, сопротивления гашения поля) его величина должна включаться в rf. В основе рассмотрения явлений согласно рис. 36-1 и 36-2 лежит представление о двухфазной машине. Поэтому сопротивления схем рис. 36-2 также следовало бы считать эквивалентными сопротивлениями двухфазной машины. Однако, чтобы избежать введения в рассмотрение новых параметров, будем предполагать, что сопротивления, фигурирующие в схемах рис. 36-2, представляют собой параметры /л-фаз-ной машины, которые определены и использованы в предыдущих
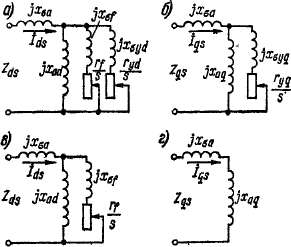 Рис. 36-2. Схемы замещения синхронной машины в асинхронном режиме при наличии (а, б) и отсутствии (в, г) успокоительной об-мртки: а, в — по продольной оси; б, г — по поперечной оси
главах. Вместе с тем будем считать также, что приложенные к двухфазной обмотке (рис. 36-1) и схемам рис. 36-2 напряжения U являются фазными напряжениями реальной m-фазной обмотки (обычно т = 3). При этом токи Ids, Iqs будут соответствовать токам /л-фазной обмотки. Например, если в определенный момент времени ось одной из фаз обмотки якоря будет совпадать с осью d,
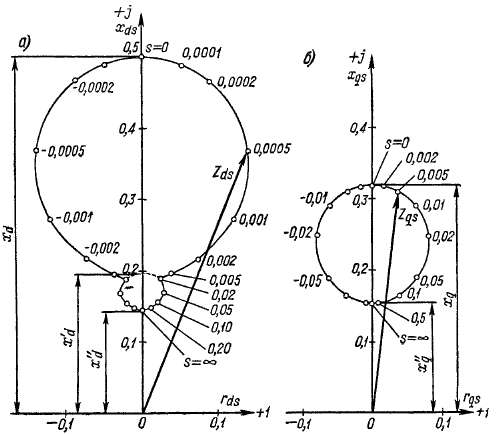 Рис. 36-3. Эквивалентные сопротивления явнополюсной синхронной машины при асинхронном режиме по продольной (а) и поперечной (б) осям
то в этой фазе будет протекать ток Ids. To обстоятельство, что анализ явлений на основе рис. 36-1 и 36-2 связывается с представлением о двухфазной машине, a U, I и Z соответствуют фазам /п-фазной машины, учитывается надлежащим образом ниже при вычислении моментов и мощностей.
Сопротивления синхронной машины по осям d и q в асинхронном режиме Zds, Zqs представляют собой сопротивления схем рис. 36-2 и являются функциями скольжения s.
При s 5= 1 для определения модулей сопротивлений Zds, Zqs обычно можно положить rf = ryd = ryq = 0, и тогда вместо схем
рис. 36-2 получим схемы рис. 34-9. Следовательно, при s ^ 1 в случае наличия успокоительной обмотки zds « x"d, zqs m xq, а при ее отсутствии zis « x'd, ZqS ж х'д = xq. Из рис. 36-2 следует, что при s = 0 имеем zds = xd и zqs = xq. В качестве иллюстрации на рис. 36-3 для машины большой мощности, имеющей успокоительную обмотку, изображены геометрические места концов векторов комплексных сопротивлений
и указаны также значения скольжения s. Этот рисунок соответствует машине со следующими значениями параметров в относительных единицах хпа* =0,41; xaq* = 0,23, хаа* = 0,09, xafif = 0,14, xaydi): = = 0,11, д:ау„= 0,09, xd* = 0,5, /dHC = 0,20, x"ds, = 0,143, д;,,* =дг^ = ^=0,32, xqif = 0,155, r^= 0,00032, ryrfH! = 0,01;y ryqjf =0,0075. Из рис 36-3 следует, что в крупной машине уже при s = 0,1 -г- 0,2 будет zds «^ и zqs « xj.
Согласно рис. 36-3, б, конец вектора комплексного сопротивления Zqs перемещается по окружности, которая соответствует окружности тока круговой диаграммы асинхронной машины с одной вторичной цепью. Кривая на рис. 36-3, а состоит из отрезков двух окружностей, соответствующих окружностям геометрического места токов двухклеточной асинхронной машины для ббластей нормальных рабочих режимов и пуска.
Величины токов и вращающих моментов. В соответствии с изложенным и рис. 36-1 и 36-2 продольный и поперечный токи якоря при асинхронном режиме
Токи /j и /2 создают н. с. и магнитные поля прямой и обратной последовательности, вращающиеся относительно ротора соответ-
ственно со скоростями s«x и — snu где пг — синхронная скорость, а относительно статора — со скоростями
Так как н. с. токов /2 статора вращается относительно статора же со скоростью пас, которая отличается в (1—2s) раз от синхронной скорости, то частота тока /2 в обмотках статора
в то время как основная частота токов 1± равна /1с = fv Таким образом, токи обмоток статора имеют составляющие разных частот, т. е. они несинусоидальны. Это вполне естественно, так как вследствие вращения несимметричного ротора относительно неподвижных фаз обмотки статора эквивалентные сопротивления этих фаз с учетом влияния ротора непостоянны, и поэтому при приложении синусоидальных напряжений U токи будут несинусоидальны.
Отметим, что частота токов /2 равна основной частоте при s = 1 и s = 0. В первом случае ротор неподвижен, и поэтому сопротивления фаз хотя и различны, но постоянны по величине, в результате чего токи фаз не равны по величине, но синусоидальны. Во втором случае (синхронный режим), согласно схемам рис. 36-2, Zds — = jxd и Zgs = jxq, так как вторичные цепи этих схем разомкнуты, При этом Ids и /gs равны продольной ld и поперечной lq составляющим тока якоря / (см. гл. 33).
Полученные здесь результаты вполне соответствуют рассмотренному в § 29:8 режиму работы асинхронного двигателя с несимметричным ротором, и к этому последнему случаю применимь§ также все рассматриваемые здесь количественные соотношения, В обоих случаях вследствие несимметрии ротора возникает такж< обратновращающееся относительно ротора поле токов /а и токи частоты
Так как мы пренебрегли потерями в статоре, то мощность Ри соответствующая токам 1Ъ полностью передается на ротор, является электромагнитной мощностью и создает вращающий момент М\ Эта мощность в m-фазной машине
  
При га Ф 0 в области s та 0,5 возникает провал результирующего момента Мя (см. § 29-8 и рис. 29-16). При га = 0 также М2 = 0 и, согласно равенству (36-12), М„ = Мх.
Если машина имеет полную успокоительную или пусковую обмотку, массивный ротор или массивные полюсы с междуполюсными перемычками, то параметры машины по разным осям при скольжениях | s | 5г 0,05 близки друг к другу: Zds ж Zqs и 4 » ^ (см. табл. 32-1 и рис. 36-3). В этих случаях на основании выражений (36-2), (36-3) и (36-10) Ids fa Iqs и /2 fa 0. Асинхронный режим поэтому является почти симметричным, М2 » 0 [см. равенство (36-11)] и одноосный эффект практически не проявляется. Вследствие этого в рассматриваемом случае можно положить г„«0и вычислять токи и момент по равенствам (36-2), (36-3) и (36-9). При отсутствии успокоительной или пусковой обмотки и при шихтованном роторе сопротивления Zds и Z?, отличаются друг от друга значительно. Поэтому в этом случае одноосный эффект проявляется сильно и необходимо пользоваться выражениями (36-10) — (36-12).
Рассмотренные вращающие моменты имеют при s = const неизменные величины и знаки. Кроме этих моментов, при Zds Ф Zqs в результате взаимодействия вращающихся относительно друг друга прямого и обратного полей возникает знакопеременный момент, пульсирующий с частотой 2s/2. При большой частоте пульсации этот момент не оказывает никакого влияния на движение ротора, но при — 0,02 < s < 0,02 ротор попеременно ускоряется и замедляется и его скорость вращения будет колебаться. При s = 0 этот момент превращается из пульсирующего в постоянный- и представляет собой реактивный момент, соответствующий последнему члену равенства (35-4).
Асинхронные режимы различных видов синхронных машин. При потере возбуждения синхронные генераторы переходят в асинхронный режим и их скорость вращения будет увеличиваться до тех пор, пока не наступит равенство между движущим моментом на валу и электромагнитным моментом машины. При этом машина буДет потреблять из сети намагничивающий ток
и отдавать в сеть активную мощность.
У турбогенераторов xd% = xq% = 1,2 -s- 2,2, поэтому /м < /н и обычно /м = (0,40 -г- 0,65)/н. У мощных гидрогенераторов, наоборот, /м > /„. У синхронных генераторов наибольший практический интерес представляет начальная часть механической характеристики Ма = / (s) (см. рис. 36-4, где отложены абсолютные значения Ма# и s, так как в режиме генератора Мл < 0 и s < 0).
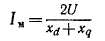
При малых скольжениях поверхностный эффект в теле ротора турбогенератора проявляется слабо и поэтому глубина проникновения токов велика. В результате активное сопротивление тела ротора мало и момент достигает весьма большой величины уже при малых скольжениях (рис. 36-4). Поэтому турбогенераторы способны раавивать в асинхронном режиме большую мощность, причем потери в роторе рэл2 = sP3M малы и не представляют опасности в отношении нагрева ротора. Допустимую мощность турбогенератора в асинхронном режиме ограничивает ток статора, величина которого из-за большого намагничивающего тока достигает номинального значения при Р •< Ря. В большинстве случаев при / = /н в турбогенераторах Р = = (0,5 +- 0,7) Рн.
Ввиду относительно благоприятных характеристик Ма = / (s) на электростанциях СССР разрешается кратковременная работа (до 30 мин) турбогенераторов в асинхронном режиме при условии, что потери в роторе и статоре не превышают потерь при номинальном режиме и потребление реактивной мощности с точки зрения режима работы энергосистемы допустимо. В течение указанного времени можно устранить неисправности в системе возбуждения, перевести турбогенератор на резервное возбуждение или перевести нагрузку на другие турбогенераторы или станции. Использование возможности работы турбогенераторов в асинхронном режиме позволяет увеличить надежность энергоснабжения потребителей.
Асинхронные характеристики гидрогенераторов значительно менее благоприятны (рис. 36-4). Гидрогенераторы имеют шихтованные полюсы, и успокоительные обмотки во многих случаях у них отсутствуют. При отсутствии успокоительной обмотки мощность в асинхронном режиме развивается только за счет токов, индуктируемых в обмотке возбуждения. Активное сопротивление успокоительной обмотки велико, и в этом случае момент Ма при малых s также мал. Поэтому гидрогенераторы не могут развивать значительной мощности в асинхронном режиме, успокоительная обмотка быстро нагревается, и если восстановление возбуждения в течение 10—15 сек невозможно, то их нужно отключать от сети.
Рис. 36-4. Зависимость асинхронного вращающего момента синхронного генератора от скольжения при замкнутой накоротко обмотке возбуждения
/ — турбогенератор; 2 — гидрогенератор без успокоительной обмотки; 3 — гидрогенератор с успокоительной обмоткой
Все синхронные двигатели имеют пусковые обмотки и обычно пускаются в ход как асинхронные двигатели, причем обмотка возбуждения замкнута через разрядное, или гасительное, сопротивление гг = (5 -г- 10) rf или замкнута накоротко. Пуск с разомкнутой обмоткой возбуждения недопустим, так как при этом может произойти повреждение ее изоляции. Скольжение невозбужденного двигателя изменяется при пуске от s = 1 до s « 0,05, когда вклю-
0,2 0,4
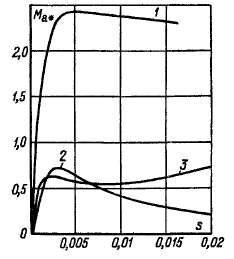
Рис 36-5 Кривые асинхронных вращающих моментов Ма = f (s)
синхронного двигателя мощностью 1250 кв-а и пн = 750 об/мин при
замыкании обмотки возбуждения а — через разрядное сопротивление
гг = 9rf и б — накоротко
/ — момент обмотки возбуждения, 2 — момент от пусковрй обмотки, 3 — полный момент
чается ток возбуждения и двигатель втягивается в синхронизм (см. § 36-2).
Кривые Ма = / (s) синхронных двигателей представлены на рис. 36-5. Момент, развиваемый обмоткой возбуждения, достигает максимального значения при малых скольжениях, в особенности, когда гг = 0, так как rf мало, а ха{ относительно велико. Наоборот^ момент, развиваемый пусковой обмоткой, достигает максимума прн s « 0,3 -г- 0,4, так как активное сопротивление этой обмотки значительно больше и рассеяние меньше. При расчете кривых рис. 36-5 было принято, что сопротивление обмотки якоря га — 0. Поэтому на этих кривых не отражено возникновение провала момента при s л; 0,5 вследствие одноосного эффекта. Следует, однако, отметить, что при наличии пусковой обмотки на роторе этот эффект прояв> ляется слабо.
Начальный пусковой момент (s = I) синхронных двигателей при U = Un должен быть достаточно велик: Мп 5^ (0,8 -*■ 1,0) Мн. С другой стороны, при малых s момент Ма также должен быть достаточно велик, так как в противном случае при пуске под нагрузкой двигатель в асинхронном режиме не сможет достичь скорости вращения, достаточно близкой к синхронной, и двигатель после включения тока возбуждения не втянется в синхронизм. Крутизну характеристики МЛ — f (s) при малых s принято определять значением М„ при s = 0,05, и эту величину момента условно называют входным моментом М м. Очевидно, что чем больше Мвх, тем лучше условия втягивания в синхронизм. Обычно требуется, чтобы Мвх « та Мп. Однако для увеличения Мп необходимо увеличить активное сопротивление пусковой обмотки, а для увеличения Мю — уменьшить его. Поэтому вопрос о выборе величин Мя% и Мп надо решать компромиссным образом и использовать явление вытеснения тока в пусковой обмотке для увеличения Ма (см. гл. 27). Стержни пусковой обмотки, с целью увеличения их сечения и теплоемкости изготовляются из латуни.
Как видно из рис. 36-5, при пуске без разрядного сопротивления (рис. 36-5* бу Мвх получается меньше и, кроме того, при малых s может образоваться провал момента, так как максимум момента от действия обмотки возбуждения наступает при весьма малом s. Поэтому при гг — 0 втягивание в синхронизм происходит в менее благоприятных условиях.
Если синхронная машина лишена успокоительной или пусковой обмотки и имеет немассивнме полюсы или ротор, то в результате сильного проявления одноосного эффекта асинхронный пуек ее возможей только на холостом ходу или при малой нагрузке на валу, причем обмотка возбуждения должна быть замкнута через значительное активное сопротивление.
Синхронные двигатели с массивными роторами или полюсами имеют бдагоприятную характеристику М, = f (s)v если отношение 4/т S* 1. При малом Ц/х большое влияние на величину тока в полюсных наконечниках начинает оказывать сопротивление торцевых зон полюсного наконечника^ и асинхронный момент поэтому М„ уменьшается.
§ 36-2. Асинхронный режим возбужденной синхронной машины
Асинхронный режим возбужденной синхронной машины, как
уже указывалось, возникает в результате ее перегрузки или падения напряжения в сети, а также при подаче возбуждения генератору после потери возбуждения или при использовании метода самосинхронизации в двигателе при его асинхронном пуске.
При вращении синхронной машины со скольжением s постоянный ток возбуждения if индуктирует в обмотке якоря э. д. с. Ек и токи /к частоты (1 — s) fr. Токи /к накладываются на ток частоты /ь протекающий в якоре под действием напряжения сети. Так как в самой сети э. д. с. и напряжений частоты (1 — s) /х «ет, то относительно э. д. с. Ек и тока /к обмотка якоря замкнута накоротко через сеть, сопротивление которой можно принять равным нулю. Поэтому ток /к в сущности эквивалентен току установившегося короткого замыкания синхронного генератора.
Для неявнополюсной машины
где Е яха — соответственно величины э. д. с., индуктируемой током-возбуждения if, и продольного синхронного сопротивления при s = 0.
Выражение (36-13) действительно также для явнополюсных машин при малых s с большой точностью, а при больших «приближенно.
Токи /к загружают машину мощностью
Момент Мк стремится уменьшить скорость вращения ротора и в режиме генератора облегчает, а в режиме двигателя затрудняет вхождение машины в синхронизм. Кроме того, при асинхронном ходе возбужденной машины в результате взаимодействия потока возбуждения, вращающегося со скоростью (1 — s) ti\, и потока якоря от токов частоты сети flt вращающегося со скоростью пъ возникает сильный пульсирующий момент Mfa, который имеет частоту sft и накладывается на асинхронный момент Мл и на момент Мк. Если нагрузка на валу и скольжение s не слишком велики, то под воздействием момента Mfu машина втягивается в синхронизм, так как в течение отрезка времени, когда Mfa действует в нужном направлении, скорость ротора п может достигнуть синхронной пх и даже превзойти ее (рис. 36-6). При этом после некоторого количества колебаний скорости ротора около синхронного значения, после затухания этих колебаний, наступит установившийся синхронный режим работы.
Отметим, что на холостом ходу или при небольшой нагрузке на валу явнополюсная синхронная машина, вращающаяся с небольшим скольжением, способна втянуться в синхронизм и без возбуждения, в результате действия реактивного момента, который при s Ф 0 также пульсирует с частотой sfx. В этом случае после включения тока возбуждения полярность полюсов может не соответствовать необходимой полярности, и тогда произойдет «проскальзывание» ротора относительно поля якоря на одно полюсное деление, причем одновременно возникнет также кратковременный всплеск тока статора. Подобный переход не представляет для машины никакой опасности.
На рис. 36-7 в качестве иллюстрации к изложенному изображены кривые изменения напряжения U "и тока / якоря, напряжения Uf « тока if обмотки возбуждения, мощности Р, угла нагрузки 9 и скольжения s турбогенератора мощностью 100 Мет при его выпадении из синхронизма в результате короткого замыкания в сети, при последующем асинхронном режиме и втягивании обратно в синхронизм (ресинхронизации). Так как потери относительно малы, тоР~'М и кривая на рис. 36-7, д характеризует также изменение момента на валу. Короткое замыкание произошло в момент t = 0 и бкло отключено в момент / = 0,5 сек. Во время короткого замыкания мощность генератора Р упала почти до нуля, и так как мощность турбины осталась неизменной, то скорость возросла и машина стала вращаться со скольжением s < 0.
В асинхронном режиме с постоянным током возбуждения, как видно из рис. 36-7, ток, мощность и момент генератора сильно пульсируют, а угол 6 между векторами Ё и U ввиду несинхронного вращения ротора непрерывно изменяется (на рис. 36-7, е изменения 9 показаны до б = 360°, после чего 6 опять начинается с нуля). На постоянный ток возбуждения накладывается переменный, индуктируемый вращающимся полем якоря. После t = 2 сек абсолютная величина скольжения начинает уменьшаться, затем меняет знак
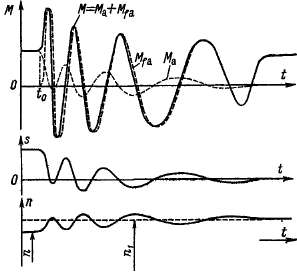 Рис. 36-6. Характер изменения вращающего момента М, скольжения s и скорости вращения п при втягивании машины в синхронизм после включения тока возбуждения в момент времени t0
и после некоторых колебаний машина втягивается в синхронизм (на рис. 36-7 после t = 4 шс виден только один период колебаний 8 и s). О втягивании в синхронизм свидетельствует то, что угол 6
совершает колебания, а не изменяется непрерывно. Синхронизации турбогенератора способствовало увеличение uf и If под действием автоматического регулятора возбуждения.
Следует отметить, что во время аварий ресинхронизация генераторов после выпадения их из синхронизма часто происходит без вмешательства персонала, причем сам факт вы-падения из синхронизма часто остается незамеченным, так как он затушевывается происходящими во время аварий колебаниями (см. § 39-1).
Аналогично происходит также синхронизация двух частей энергосистемы, если они включаются на параллельную работу без предварительной синхронизации после того, как в результате аварии они разделились и стали работать несинхронно. Указанные процессы совершаются тогда во всех генераторах энергосистемы» причем наиболее интенсивно в тех из них, которые расположены ближе к точке раздела системы. В энергосистемах СССР самосинхронизация разделившихся частей энергосистем двпускаетс4 в случаях, когда максимальные толчки тока в гидрогенераторах не превышают 3/„ и в турбогенераторах 5/в и длительность асинхронного хода не больше 10—15 сек.
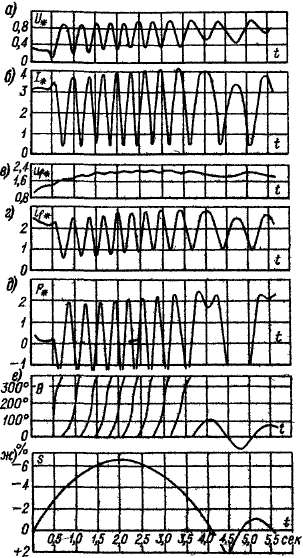 Рис. 36-7. Зависимость электромагнитных величии возбужденного турбогенератора от времени при выпадении машины из синхронизма, последующем асинхронном ходе и ре синхронизации
§ 36-3. Самовозбуждение синхронной машины
В цепях обмотки якоря синхронных машин часто содержатся емкости (емкость между проводами длинных линий передачи и между ними и землей; емкости так называемой продольной компенсации индуктивного сопротивления линий передачи, включаемые последовательно в фазы линии передачи сверхвысокого напряжения — 500 кв и выше; батареи конденсаторов для улучшения коэффициента мощности сети и др.)- В таких случаях возможно самовозбуждение синхронных машин, когда вращающаяся машина развивает напряжение и нагружается током при отсутствии тока возбуждения.
Магнитное поле в синхронной машине при этом создается емкостным током /, отдаваемым машиной в сеть, или, что то же самое, индуктивным током, потребляемым машиной из сети. При самовозбуждении ротор синхронной машины может вращаться синхронно с магнитным полем статора (синхронное самовозбуждение) или асинхронно с ним (асинхронное самовозбуждение). Для выяснения условий самовозбуждения рассмотрим работу одиночного генератора на емкость (рис. 36-8, о).
Синхронное самовозбуждение. При наличии остаточного магнитного потока при вращении ротора в обмотке якоря индуктируется некоторая э. д. с. Е. Эта э. д. с. при работе по схеме рис. 36-8 вызывает в цепи якоря емкостный ток /, который создает намагничивающую реакцию якоря. В результате магнитный поток, индуктируемая в якоре э. д. с. и ток / увеличиваются и т. д. (рис. 36-9, а и б). Этот процесс самовозбуждения аналогичен самовозбуждению генератора постоянного тока с той лишь разницей, что в данном случае поток машины создается самим током якоря.
На рис. 36-8, б изображена зависимость напряжения генератора от емкостного тока якоря /. Если положить га = 0, то
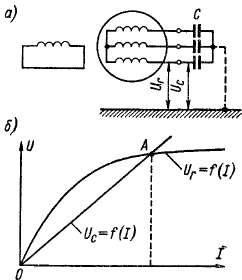 Рис. 36-8. Схема работы синхронного генератора на емкостную нагрузку (а) и его характеристики при синхронном самовозбуждении (б)
Зависимость UT= f (/) практически идентична с характеристикой холостого хода UT = f (if), если ток возбуждения ij привести к обмотке якоря. Вследствие насыщения величина % вдоль кривой Ur = / (/) изменяется.
С другой стороны, напряжение на конденсаторах
и зависимость Uc = f (/) прямолинейна (рис. 36-8, б).
Если Ur > Uq или xd > хс (рис. 36-8, б), то самовозбуждение возможно и при наличии остаточного магнитного потока возникает в действительности.
В точке А на рис. 36-8, б Ur= Uc и поэтому увеличение / прекращается и процесс самовозбуждения заканчивается.
Самовозбуждение представляет собой нежелательное явление, так как оно неуправляемо и напряжения и токи при этом могут достичь опасных значений.

Очевидно, что самовозбуждение невозможно, когда xdw < xc, так как при этом кривая Uc на рис. 36-8, б пойдет выше кривой Ut.
Для характеристики реальных соотношений укажем, что включение под напряжение разомкнутой на приемном конце линии передачи Волжская ГЭС им. В. И. Ленина — Москва путем приключения ее к одному генератору ГЭС недопустимо, так как генератор при этом самовозбуждается, а при двух параллельно включенных генераторах их эквивалентное Хд в два раза меньше и самовозбуждения не происходит.
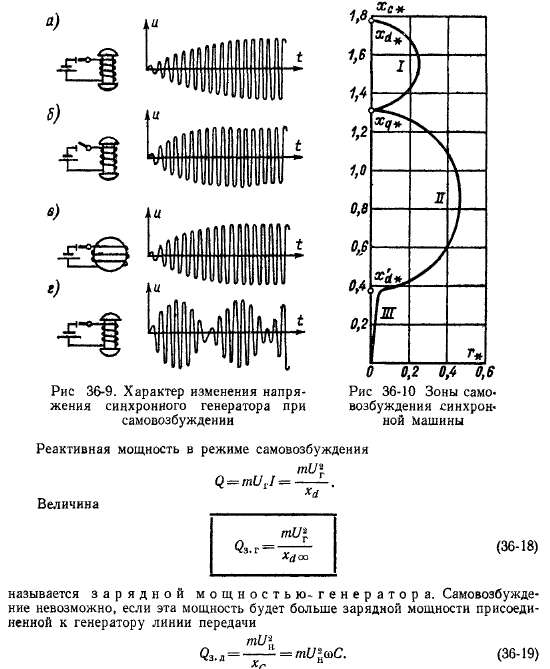
В реальных условиях сопротивление цепи якоря г^Ои поэтому генератор должен при самовозбуждении развивать также активную мощность. Неяв-нополюсный генератор при г Ф 0 и г^ = 0 в синхронном режиме не может развивать активной мощности и поэтому его синхронное самовозбуждение невозможно. Такое возбуждение возможно только у явнополюсного генератора, у которого необходимая мощность развивается за счет реактивного момента. При этом не имеет значения, будет ли обмотка возбуждения замкнута или разомкнута (рис. 36-9 а и б).
Физически ясно, что при слишком большом г синхронное самовозбуждение также невозможно, так как при этом активная мощность окажется большей, чем может развить явнополюсная машина в устойчивом синхронном режиме работы без возбуждения.
На рис. 36-10 зона / представляет собой соотношения между хс и г, при которых самовозбуждение происходит. Из этого рисунка видно, что синхронное самовозбуждение происходит в области ха>хс> х9.
Асинхронное самовозбуждение синхронной машины того же вида, как и в асинхронных машинах (см. § 29-2), происходит в случае, когда емкость настолько велика, что * с < .х:^ (зона /// на рис. 36-10). Этот вид самовозбуждения возможен только при наличии на роторе замкнутых обмоток или контуров тока, в которых при асинхронном вращении ротора относительно поля якоря индуктируются токи. Если при этом ротор в электрическом отношении симметричен (x"d <=zx"q), то амплитуда тока якоря в установившемся режиме бу ;т постоянной (рис. 36-9, в), а при х% Ф x"q или x'd ф х (явнополюсная машина ( з успокоительной обмотки) ток якоря пульсирует (рис. 36-9, г),
В области Х- > хс > x'd (зона // на рис. 36 0) самовозбуждение носит промежуточный характер, когда относительная скорость ротора и поля якоря резко неравномерна и ротор периодически «проскальзывает» относительно поля якоря на величину полюсного деления. В результате медленные изменения угла нагрузки 8 чередуются с быстрыми (рис. 36-11). Ток якоря при этом также пульсирует (рис. 36-9, г), и самовозбуждение происходит только при замкнутой обмотке возбуждения. Такой вид самовозбуждения называют также р е п у л ь -сионно-синхронным.
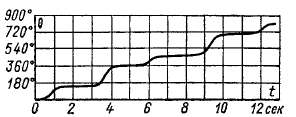 Рис. 36-11. Характер изменения угла 8
во времени в процессе репульсионно-
синхронного самовозбуждения
Содержание
Предыдущий § Следующий
| 