|
Содержание
Предыдущий § Следующий
Глава тридцать пятая ПАРАЛЛЕЛЬНАЯ РАБОТА СИНХРОННЫХ МАШИН
§ 35-1. Включение синхронных генераторов на параллельную работу
На каждой электрической станции обычно бывает установлено несколько генераторов, которые включаются на параллельную работу в общую сеть. В современных энергосистемах на общую сеть, кроме того, работает целый ряд электростанций, и поэтому параллельно на общую сеть работает большое число синхронных генераторов. Благодаря этому достигается большая надежность энергоснабжения потребителей, снижение мощности аварийного и ремонтного резерва, возможность маневрирования энергоресурсами сезонного характера и другие выгоды.
Все параллельно работающие генераторы должны отдавать в сеть ток одинаковой частоты. Поэтому они должны вращаться строго в такт или, как говорят, синхронно, т. е. их скорости вращения пх, п2, «з--- должны быть в точности обратно пропорциональны числам пар полюсов:
 В частности, скорости вращения генераторов с одинаковыми числами полюсов должны быть в точности одинаковыми. Условия синхронизации генераторов.
При включении генераторов на параллельную работу с другими генераторами необходимо избегать чрезмерно большого толчка тока и возникновения ударных электромагнитных моментов и сил, способных вызвать повреждение генератора и другого оборудования, а также нарушить работу электрической сети или энергосистемы.
Поэтому необходимо отрегулировать надлежащим образом режим работы генератора на холостом ходу перед его включением на параллельную работу и в надлежащий момент времени включить генератор в сеть. Совокупность этих операций называется синхронизацией генератора.
Идеальные условия для включения генератора на параллельную работу достигаются при соблюдении следующих требований:
1) напряжение включаемого генератора Ur должно быть равно напряжению сети £/с или уже работающего генератора;
 2) частота генератора /г должна равняться частоте сети /с;
3) чередование фаз- генератора и сети должно быть одинаково;
4) напряжения Ur и Uz должны быть в фазе.
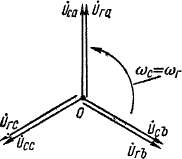
При указанных условиях векторы напряжений генератора и сети совпадают и вращаются с одинаковой скоростью (рис. 35-1), разности напряжений между контактами выключателя при включении генератора (рис. 35-2) равны:
= tfrc-tfcc = 0, (35-1)
и поэтому при включении не возникает никакого толчка тока.
Равенство напряжений достигается путем регулирования тока возбуждения генератора и контролируется с помощью вольтметра. Изменение частоты и фазы напряжения генератора достигается изменением скорости вращения генератора. Правильность чередования фаз необходимо проверять только при первом включении генератора после монтажа или сборки схемы. Совпадение напряжений
по фазе контролируется с помощью ламп, нулевых вольтметров или специальных синхроноскопов, а в автоматических синхронизаторах — с помощью специальных измерительных элементов.
Неправильная синхронизация может вызвать серьезную аварию. Действительно, если, например, напряжения Ur и Vc будут в момент включения генератора на параллельную работу сдвинуты по фазе на 180°, то это эквивалентно короткому замыканию при удвоенном напряжении (От — Ос = 2 (Уг). Если генератор включается в сеть мощной энергетической системы, то сопротивление этой сети по сравнению с сопротивлением самого генератора можно принять равным нулю, и поэтому ударный ток при включении может превысить ток при обычном коротком замыкании в два раза. Ударные электромагнитные моменты и силы при этом возрастают в четыре раза.
Зарегистрировано немало случаев, когда неправильная синхронизация вызывала серьезные повреждения оборудования (повреждение обмоток, поломка крепежных деталей сердечников и полюсов, поломка вала, разрушение всего генератора).
Синхронизация с помощью лампового синхроноскопа может осуществляться по схеме на погасание или на вращение света.
Рис. 35-1. Векторные диаграммы напряжений сети Uc и генератора Ut при идеальных условиях включения на параллельную работу
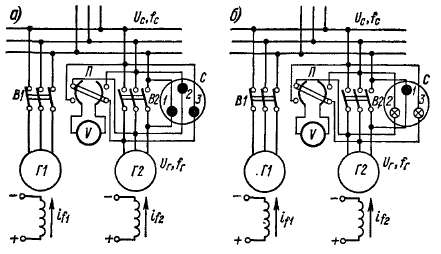
Схема синхронизации на погасание света представлена на рис. 35-2, а, где слева изображен генератор Г1, >же работающий на шины станции и сеть, а справа — включаемый на параллельную работу генератор Г2 с вольтметром V, вольтметровым переключателем Я и с лам-
Рис. 35-2. Схема синхронизации генератора с помощью ламповых синхроноскопов с включением на погасание (а) и вращение (б) света
повым синхроноскопом С, каждая из ламп 1,2,3 которого включена между контактами одной и той же фазы или полюса выключателя В2. При соблюдении приведенных выше условий и равенства (35-1) напряжения на всех лампах одновременно равны нулю и лампы не
светятся, что и указывает на возможность включения генератора" Г2 с помощью выключателя В2 на параллельную работу.
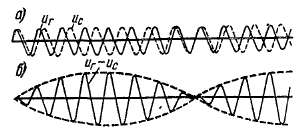
Достичь точного равенства частот Д. = /с в течение даже небольшого промежутка времени практически невозможно (рис. 35-3, а), и поэтому напряжения Ur — Uc на лампах /, 2, 3 (рис. 35-2, а) пульсируют с частотой Д. — /с (рис. 35-3), и если эта частота мала, то лампы загораются и погасают с такой же частотой. Частота /г — /с соответствует частоте пульсаций напряжения (штриховые кривые на рис. 35-3, б). Путем регулирования частоты генератора необходимо добиться того, чтобы частота загорания и погасания ламп была минимальна
Рис. 35-3. Кривые изменения во времени
напряжений генератора «г, сети ис и
ламп иг — мс при неравенстве частот
сети и генератора
(период 3—5 сек), и произвести затем включение выключателя В2 в момент времени, когда лампы не горят.
При малой частоте лампы погасают раньше, чем напряжение достигнет нуля, и загораются также при U > 0. Поэтому при схеме рис. 35-2, а трудно выбрать правильный момент включения. В этом отношении лучшей является схема рис. 35-2, б, в которой лампа / включена так же, как на схеме рис. 35-2, а, а лампы 2 и 3 — между различными фазами генератора и сети. Поэтому в данном случае при соблюдении перечисленных выше условий и равенства (35-1) лампа 1 не светится, а лампы 2 и 3 находятся под линейным напряжением и светятся с одинаковой яркостью, что и является критерием правильности момента включения. При Д. — /с =f= 0 лампы 1, 2 и 3 (рис. 35-2, б) загораются и погасают поочередно, и создается впечатление вращающегося света, причем при fr > /с вращение происходит в одну сторону, а при /г < /с — в другую. Частота вращения света равна /г — /с, и необходимо добиться, чтобы она была минимальна (период 3—5 сек).
Отметим, что если при осуществлении схемы рис. 35-2, а вместо одновременного погасания и загорания всех трех ламп получится вращение света, а при схеме рис. 35-2, б — одновременное погасание и загорание ламп, то это будет указывать на неправильность чередования фаз генератора и сети. При этом необходимо поменять местами начала двух фаз обмотки статора генератора.
Для более точного выбора момента включения параллельно одной из ламп рис. 35-2, а включают вольтметр, имеющий растянутую шкалу в области нуля (нулевой вольтметр).
Другие методы синхронизации. Синхронизация с помощью ламп и нулевого вольметра применяется только для генераторов малой мощности. Для мощных генераторов пользуются электромагнитным синхроноскопом, к которому подаются напряжения генератора и сети. Этот прибор работает на принципе вращающегося магнитного поля, и при /, Ф /с его стрелка вращается с частотой Д. — /с в ту или иную сторону в зависимости от того, какая частота больше. При правильном моменте включения стрелка синхроноскопа обращена вертикально вверх.
При высоком напряжении приборы синхронизации включаются через трансформаторы напряжения. При этом необходимо позаботиться о том, чтобы фазировка (чередование фаз) этих трансформаторов была правильной.
Синхронизация генераторов является весьма ответственной операцией и требует от эксплуатационного персонала большого внимания. В особенности это важно в случае различных аварий, когда персонал работает в напряженной обстановке. В то же время именно при авариях необходима максимальная оперативность в производстве различных переключений и в синхронизации резервных
или отключившихся во время аварий генераторов. Опыт показывает, что наибольшее количество ошибочных действий персонала падает как раз на период аварий.
Для исключения ошибок персонала и облегчения его работы пользуются автоматическими синхронизаторами, которые осуществляют автоматическое регулирование Ut и /г синхронизируемых генераторов в нужных направлениях и при достижении необходимых условий автоматически включают генераторы на параллельную работу. Однако подобные автоматические синхронизаторы также обладают недостатками (сложность, необходимость непрерывного и квалифицированного обслуживания и т. д.). К тому же
во время аварий напряжение и частота в системе нередко беспрерывно и быстро меняются и поэтому процесс синхронизации с помощью автоматических синхронизаторов сильно затягивается (до 5—10 мин и даже более), что с точки зрения ликвидации аварии крайне нежелательно. Вследствие сказанного в СССР в последние годы широко внедрен метод грубой синхронизации, или с а -мосинхронизации.
Сущность метода самосинхронизации заключается в том, что генератор включается в сеть в невозбужденном состоянии (UT = 0) при скорости вращения, близкой к синхронной (допускается отклонение до 2%). При этом отпадает необходимость в точном выравнивании частот, величины и фазы напряжений, благодаря 'чему процесс синхронизации предельно упрощается и возможность ошибочных действий исключается. После включения невозбужденного генератора в сеть немедленно включается ток возбуждения и генератор втягивается в синхронизм (т. е. его скорость достигает синхронной и становится /г_= /с).
При самосинхронизации неизбежно возникновение значительного толчка тока, так как включение невозбужденного генератора в сеть с напряжением Uc эквивалентно внезапному короткому замыканию этого генератора при работе на холостом ходу с Е = [/с. Однако толчок тока при самосинхронизации будет все же меньше, так как, кроме сопротивления генератора, в цепи будут действовать также сопротивления элементов сети (повышающие трансформаторы,
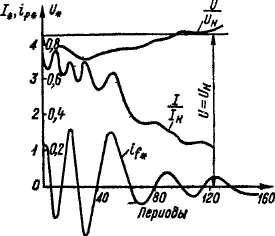 Рис. 35-4. Кривые изменения токов турбогенератора мощностью 100 Мет при включении в сеть методом самосинхронизации
линия и т. д.). Кроме того, включение генератора производится при включенном сопротивлении гашения поля, что также снижает величину ударного тока и способствует быстрому затуханию переходных токов.
По действующим в СССР правилам метод самосинхронизации можно применять в случаях, когда толчок тока не будет превышать 3,5 /н. В большинстве случаев это условие выполняется. На рис. 35-4 представлены кривые, относящиеся к включению в сеть методом самосинхронизации турбогенератора мощностью 100 Мет.
§ 35-2. Синхронные режимы параллельной работы синхронных машин
Режим работы синхронной машины параллельно с сетью при синхронной скорости вращения называется синхронным.
Рассмотрим особенности этого режима подробнее, причем предположим для простоты, что сеть, к которой приключена рассматриваемая машина, является бесконечно мощной, т. е. в ней U~= const и / = const. Практически это означает, что суммарная мощность всех приключенных к этой сети синхронных генераторов настолько велика по сравнению с мощностью приклю-чаемой машины, что изменение режима работы машины не влияет на напряжение и частоту сети.
Напряжение параллельно работающего генератора равно напряжению сети на зажимах генератора. Для простоты предположим также, что включаемая на параллельную работу машина является неявно-полюсной и сопротивление якоря га = 0. Тогда, согласно диаграмме рис. 33-4, ток якоря машины определяется поостой зависимостью
Рис. 35-5. Векторные диаграммы неявнополюсной синхронной машины при работе в режиме компенсатора (а, б), генератора (в) и двигателя (г)
Изменение реактивной мощности. Режим синхронного компенсатора. Предположим, что при включении на параллельную работу изложенные в § 35-1 условия синхронизации возбужденного
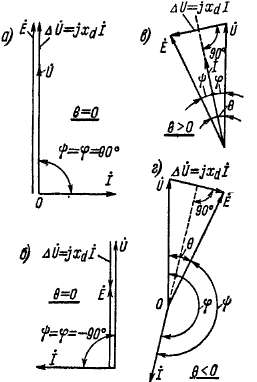 
генератора были соблюдены в точности, т. е. 0т = 0с или Е — = 0z = О. Тогда, согласно равенству (35-2), / = 0, т. е. машина не примет на себя никакой нагрузки.
Предположим теперь, что ток возбуждения после синхронизации был увеличен и поэтому Ё > О. Тогда (рис. 35-5, а) возникает ток / [см. равенство (35-2)], отстающий от А(/, а также от Ё и О на 90°. Машина, таким образом, будет отдавать в сеть чисто индуктивный ток и реактивную мощность. Если ток возбуждения уменьшить, так что Ё < О (рис. 35-5, б), то ток / также будет отставать от Д# на 90°, но будет опережать Ё и О на 90°, т. е. машина будет отдавать в сеть емкостный ток и потреблять из сети реактивную мощность.
Таким образом, изменение тока возбуждения синхронной машины вызовет в ней только реактивные токи или изменение реактивного тока и реактивной мощности. При Е > U синхронная машина называется перевозбужденной, а при Е < U — недовозбужденной. При равенстве активной мощности нулю перевозбужденная синхронная машина по отношению к сети эквивалентна емкости, а недовозбужденная — индуктивности.
Синхронная машина, не несущая активной нагрузки и загруженная реактивным током, называется синхронным ком-пенсатортзм. Такие компенсаторы применяются для повышения коэффициента мощности и поддержания нормального уровня напряжения в сетях.
Если, например, такой компенсатор установить в районе большой промышленной нагрузки и перевозбудить его, то он будет снабжать асинхронные двигатели промышленных предприятий реактивной мощностью, питающая сеть и генераторы электрических станций будут полностью или частично разгружены от этой мощности, коэффициент мощности генераторов и сети повысится, потери мощности и падения напряжения в них уменьшатся и напряжение сети у потребителей сохранится на нормальном уровне.
Изменение активной мощности. Режимы генератора и двигателя.
Из сказанного выше следует, что изменение тока возбуждения не вызывает появления активной нагрузки или ее изменения. Чтобы включенная на параллельную работу машина приняла на себя активную нагрузку и работала в режиме генератора, необходимо увеличить движущий механический вращающий момент на ее валу, увеличив, например, поступление воды или пара в турбину.
Тогда равенство моментов на валу нарушится, ротор генератора, а следовательно, и вектор э. д. с. генератора Ё з-абегут вперед на
некоторый угол 8 (рис. 35-5, в). При этом возникнет ток / [см. равенство (35-2)], отстающий, как и ранее, от АО = Ё — О на 90°. Но, как следует из рис. 35-5, в, в данном случае — 90° < ф < 90е и
т. е. машина отдает в сеть активную мощность.
Если, наоборот, притормозить ротор машины, создав на его валу механическую нагрузку, то э. д. с. Ё отстанет от О на некоторый угол 9, ток / будет отставать от О на угол 90° < Ф < 270°. При этом мощность машины Р = mUI cos ф<0 и машина будет работать в режиме двигателя, потребляя активную мощность из сети (рис. 35-5, г).
а) в$=о
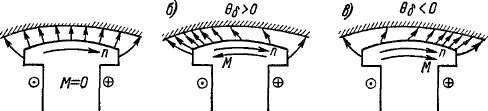 Рис. 35-6. Характер магнитного поля в воздушном зазоре при работе синхронной машины на холостом ходу (о), в режиме генератора (б)
и двигателя (е)
Как следует из рис. 35-5, в и г, у генератора вектор О отстает от вектора Ё, а у двигателя — наоборот. Угол нагрузки е в первом случае будем считать положительным, а во втором — отрицательным.
Характер магнитного поля в зазоре между статором и ротором в режимах генератора и двигателя изображен на рис. 35-6. У генератора ось полюсов сдвинута относительно оси потока на поверхности статора на угол бе (см. рис. 33-1 и 33-4) вперед, по направлению вращения (8е>0). а у двигателя — против направления вращения (8б<0). Угол 9 s можно назвать внутренним углом нагрузки. Образование электромагнитного вращающего момента М и направление его действия согласно рис. 35-6 можно объяснить также тяжением магнитных линий.
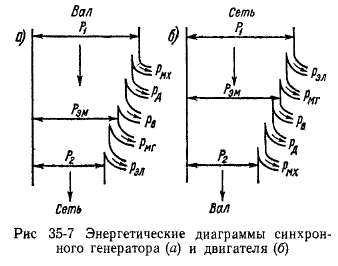
Преобразование энергии в синхронных машинах нормальной конструкции, с вращающимся индуктором и возбудителем на общем валу, иллюстрируется энергетическими диаграммами рис. 35-7, где рмх — механические потери, рв — потери на возбуждение синхронной машины, включая потери в возбудителе, рд — добавочные потери от высших гармоник поля в стали статора и ротора, рмг — основные магнитные потери и рэл — электрические потери в обмотке якоря. Для генератора Рх — потребляемая с вала механиче-

екая мощность и Р2 — отдаваемая в сеть электрическая мощность, а для двигателя Рх — потребляемая из сети электрическая мощность и Р2 — развиваемая на валу механическая мощность. Электромагнитная мощность Рт передается с помощью магнитного поля с ротора на статор в режиме генератора и в обратном направлении — в режиме двигателя. Добавочные потери покрываются за счет механической мощности на роторе. Механические потери возбудителя включаются в потери рмХ.
Весьма важно отметить, что при изменении движущего или тормозящего механического момента на валу синхронная машина обладает свойствами саморегулирования и способностью до известных пределов сохранять синхронизм с сетью, т. е. синхронное вращение с другими синхронными машинами, приклочен-ными к этой сети. Например, при приложении к валу положительного вращающего момента М„ ротор будет ускоряться и угол нагрузки будет расти от нуля (рис. 35-5, в). Вместе с тем машина начинает нагружаться активной мощностью Р и развивать тормозящий электромагнитный момент М. При этом величины 6, Р и М будут расти до тех пор, пока не наступит равновесие моментов МСТ = М на валу. Одновременно" с этим восстановится также баланс между потребляемой с вала механической мощностью, отдаваемой в сеть электрической мощностью и потерями в машине. В случае приложения к валу тормозящего момента Мст (рис. 35-5, г) угол 6 будет расти по абсолютной величине также до тех пор, пока не восстановится равновесие моментов на валу и баланс мощностей.
Все изложенное выше действительно также для явнополюсной машины с той лишь разницей, что диаграммы рис. 35-5,-б и г будут несколько сложнее.
На рис. 35-5, в и г Е = U. Как видно из этих рисунков, при этом ток / будет иметь также некоторую реактивную составляющую. Если изменить ток возбуждения так, что будет Е 55 U, то при сохранении активной мощности это вызовет изменение реактивного тока и реактивной мощности (см., например, рис. 33-1, 33-2 и 33-4).
Параллельная работа синхронных генераторов на сеть ограниченной мощности. В ряде случаев мощность отдельного генератора составляет значительную часть мощности всех генераторов системы. В других случаях станция с несколькими генераторами соединена с мощной системой через длинную линию передачи. Хотя в этих условиях установленные выше общие положения также сохраняются в силе, однако при этом изменение режима работы одного генератора оказывает все же заметное влияние на режим работы других генераторов.
Для выяснения особенностей параллельной работы в этих условиях допустим, что параллельно на общую сеть работают два генератора одинаковой мощности, снабжая электроэнергией группу потребителей (см. рис. 35-2). Если, например, увеличить одновременно токи возбуждения ifl, ij2 этих генераторов, то напряжение U обоих генераторов и всей сети возрастет. При увеличении U в общем случае возрастет также реактивная мощность потребителей, например асинхронных двигателей. При ifl = ij2 эта мощность распределится поровну между обоими генераторами.
Если увеличить только ijx, то U также возрастет, но в меньшей степени. В то же время реактивная мощность генератора Г1 увеличится, а генератора Г2 — уменьшится. При увеличении i^ для сохранения U = const ток if% другого генератора нужно уменьшить. При этом реактивная мощность генератора П возрастет, а генератора Г2 — уменьшится.
Таким образом, в системе ограниченной мощности для повышения напряжения сети необходимо увеличивать токи возбуждения всех генераторов, а для перераспределения общей реактивной мощности между отдельными генераторами при U = const нужно токи возбуждения одних генераторов увеличивать, а других — уменьшать.
Если увеличить вращающие моменты или мощности первичных двигателей всех генераторов в системе ограниченной мощности, то скорость вращения этих двигателей и частота сети будут возрастать. При этом повысится также мощность потребителей, например, в результате повышения скорости вращения асинхронных двигателей. Повышение частоты будет происходить до тех пор, пока не наступит баланс мощностей между первичными двигателями и потребителями с учетом потерь в генераторах и сети. Для сохранения / = const при увеличении мощности первичного двигателя одного генератора мощность первичного двигателя второго нужно уменьшить. При этом происходит перераспределение активных мощностей.
При недостатке генерируемой активной мощности в системе частота / будет падать, что нарушит нормальное энергоснабжение потребителей. При недостатке генерируемой реактивной мощности
в системе (невозможность поддерживать на необходимом уровне реактивную мощность генераторов электростанций и синхронных компенсаторов во избежание перегрузки их током) напряжение системы будет падать, при определенных условиях даже катастрофически (так называемая лавина напряжения). Поэтому сохранение баланса реактивных мощностей в системе не менее важно, чем сохранение баланса активных мощностей.
§ 35-3. Угловые характеристики мощности синхронных машин
Вывод формулы угловой характеристики активной мощности.
Как было установлено выше, мощность синхронной машины Р зависит от угла нагрузки 6 между векторами э. д. с. £ и напряжения (] машины. Зависимость Р = f (б) при Е = const и U = const называется угловой характеристикой активней мощности синхронной машины. Изучение этой зависимости позволяет выяснить ряд важных свойств синхронной машины. Выведем математическое выражение для угловой характеристики мощности, приняв га = О, так как это сопротивление весьма мало влияет на вид угловой характеристики.
Спроектируем на рис. 33-3 векторы э. д. с, напряжений и падений напряжения на направление вектора £ и на направление, перпендикулярное ему. Тогда получим
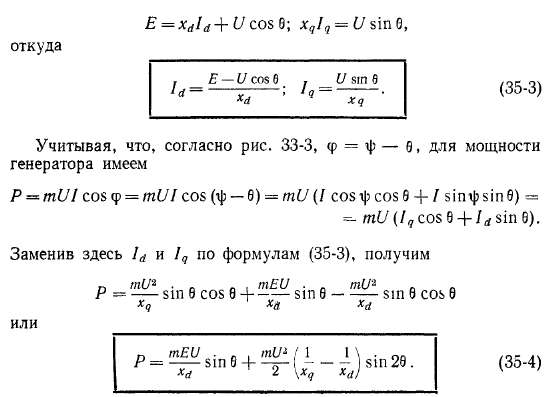
Равенство (35-4) и является искомым математическим выражением угловой характеристики мощности, согласно которому Р — = / (Е, U, 8, xd, Хд). Электромагнитный момент М = P/Q = = рР/со пропорционален мощности Р, и поэтому зависимость М = — f (E, U, 0, xd, xq) имеет подобный же вид.
В выражение (35-4) необходимо подставлять насыщенные значения xd и xq, соответствующие величине результирующей э. д. с. £б при данном режиме, и значение Е по спрямленной насыщенной х. х. х., соответствующей этому же значению Е&. Учитывая, что значение хоа1 относительно мало, можно принять Е& да U. Равенством (35-4) можно пользоваться также тогда, когда под U понимается напряжение не на зажимах машины, а в какой-нибудь более удаленной точке линии, соединенной с машиной (например, за повышающим трансформатором, на приемном конце линии и т. д.). В этом случае в величины xd и хд нужно включить также индуктивное сопротивление линии до рассматриваемой точки. Угол нагрузки 8 во всех случаях измеряется между э. д. с. от поля возбуждения генератора Е и рассматриваемым напряжением U.
Неявнополюсная машина. Понятие о статической устойчивости. Далее будем предполагать, что машина работает параллельно с сетью бесконечной мощности и поэтому U = const, / = const и ток возбуждения генератора не изменяется. Для простоты предположим также, что цс = const и, следовательно, xd = const и xq = = const.
У неявнополюсной машины xq = xd и на основании выражения (35-4)
 При указанных предположениях Р = / (8), согласно равенству (35-5), представляет собой синусоиду (рис. 35-8, а). Полуволны Р > 0 соответствуют генераторному режиму работы и полуволны Р < 0 — двигательному. Как следует из рис. 35-8, а, при беспрерывном изменении 8 синхронная машина попеременно переходит из генераторного режима работы в двигательный и обратно. Такое изменение 8 означает, что ротор машины вращается несинхронно — несколько быстрее или несколько медленнее поля реакции якоря. Зависимость Р = f (в) на рис. 35-8, а при этом действительна только при бесконечно медленном изменении 8, когда в результате несинхронного вращения ротора в цепях индуктора не индуктируется никаких токов.
Изменение угла 8 на величину 2я означает, что ротор машины передвинулся относительно поля статора на два полюса. Режим
работы машины при этом, как это ясно из физических соображений, равенств (35-4), (35-5) и рис. 35-8, а, не изменяется. Поэтому достаточно рассмотреть угловую характеристику в пределах — я sS; е < я. Диапазон — я sc; б «S 0 соответствует двигательному, а диапазон 0 ==с 6 «S л — генераторному режиму. Так как полупериоды синусоидальной кривой симметричны, то свойства синхронной машины в двигательном и генераторном режимах аналогичны. Поэтому ниже рассмотрим режим генератора (рис. 35-9). Согласно рис. 35-9, при увеличении Р от нуля угол 6 будет расти от 6 = 0 и при критическом угле нагрузки 6кр = 90° достигается максимальная мощность Р — Рт, которую способен развить генератор. На основании выражения (35-5) для неявнопо-люсной машины
Как видно из равенства (35-6), Рт тем больше, чем больше Е или ток возбуждения машины, чем больше U и чем меньше*<*. По этой причине-с целью уменьшения xd в синхрон-
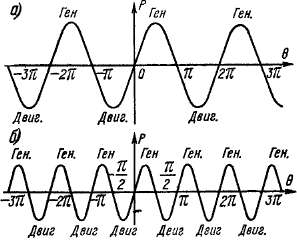  Рис 35-8 Угловые характеристики активной мощности неявнополюсной (а) и реактивной (б) синхронной машины
ных машинах зазор выполняется больше, чем в асинхронных машинах.
В установившемся режиме работы генератора механическая' мощность Рп д, развиваемая первичным двигателем, равна электрической мощности Р, отдаваемой генератором в сеть, т. е. Рп д = Р. При этом под Рп. д следует понимать мощность первичного двигателя за вычетом механических и магнитных потерь в генераторе (при га = О электрические потери в якоре равны нулю). Мощность Рп д не зависит от угла б и поэтому изображена на рис. 35-9 горизонтальной прямой, которая пересекается с характеристикой электрической мощности Р — f (6) в точках / и 2. В этих точках Рп. д = Р, и, следовательно, обе они могли бы соответствовать нормальному установившемуся режиму работы. Однако устойчивой является только работа в точке /.
Действительно, если при работе в точке / рис. 35-9 в результате небольшого случайного преходящего возмущения угол 8 увеличится на Де, то электрическая мощность генератора превысит
мощность первичного двигателя на АР. Вследствие этого на валу будет действовать избыточный тормозящий электромагнитный момент
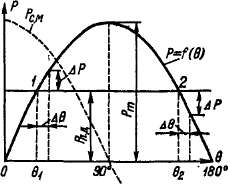 Рис. 35-9. Угловая характеристика
активной мощности неявнополюс-
ного синхронного генератора
и ротор генератора будет притормаживаться. Угол е будет уменьшаться, и восстановится устойчивый установившийся режим работы в точке /. Если при работе в точке 1 угол 6 в результате случайного возмущения уменьшится, то при прекращении действия этого возмущения генератор также вернется в режим работы в точке 1.
Если же при работе в точке 2 рис. 35-9 угол е увеличится на Дб, то мощность генератора будет на АР меньше мощности турбины, ротор будет ускоряться, угол 8 возрастет еще больше и т. д. В результате генератор выйдет из синхронизма или при благоприятных условиях перейдет в устойчивый режим работы на последующих положительных полуволнах кривой рис. 35-8, а после «проскальзывания» ротора на четное число полюсных делений. Если же при работе в точке 2 угол 6 уменьшится,
то вследствие нарушения баланса мощностей этот угол будет уменьшаться и далее, пока этот баланс не восстановится в точке 1.
Таким образом, работа неявнополюсного генератора устойчива в области 0 •< 6 <С 90° и неустойчива в области 90° < 6 < 180°.
Аналогичным образом можно установить, что неявнополюс-ный синхронный двигатель работает устойчиво в области 0 > 8 > —90°.
Рассмотренные здесь вопросы относятся к области так называемой статической устойчивости синхронной машины.
Режим работы определенной установки называется статически устойчивым, если при наличии весьма небольших возмущений режима работы (небольшое изменение U, Рп- д, if и т. д.) изменения режима работы (величина 9, Рит. д.) также будут небольшими и при прекращении действия этих возмущений восстановится прежний режим работы. Из сказанного

выше следует, что режим работы синхронной машины статически устойчив, если
 Невозбужденная явнополюсная машина. Если if = 0, то и Е = О,
так как в нормальных машинах э д с. от остаточного магнитного потока пренебрежимо мала. В этом случае на основании выражения (35-4)
Зависимость Р = f (б), согласно равенству (35-10), представляет собой синусоиду с удвоенной частотой (рис. 35-8, б).
Из равенства (35-10) и рис. 35-8, б следует, что явнополюсная машина в состоянии развивать мощность при синхронном режиме
работы также без возбуждения. Устойчивая работа в режиме генератора происходит при 0 < е < 45°, а в режиме двигателя — при — 45° < 6 < 0°. Пределу устойчивой работы соответствует е кр = ± 45° вместо 8кр = ± 90° в предыдущем случае.
В рассматриваемом случае в машине существует только поток реакции якоря. При цилиндрическом
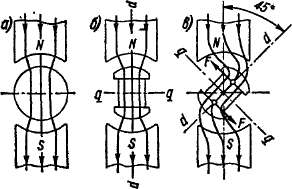 Рис 35-10 Картины магнитного поля невозбужденной синхронной машины
р
роторе (рис. 35-10, а), когда x<i — xq, положение ротора относительно вращающегося поля реакции якоря безразлично, поэтому машина не развивает электромагнитного момента и мощности. В явнополюсной машине ротор стремится занять по отношению к вращающемуся полю положение, при котором сопротивление магнитному потоку и энергия магнитного поля минимальны. Если при этом приложенный к валу момент Мст = 0, то 6=0 (рис. 35-10, б) и электромагнитный момент, действующий на ротор, также равен нулю. При этом, согласно равенству (35-10), также Р — 0. Если вал нагружен внешним моментом, то положение ротора относительно поля смещается, 9 Ф 0

и в машине развиваются электромагнитный момент и активная мощность (рис. 35-10, в). Так как сам ротор не намагничен, то поворот ротора относительно поля на 180° не приводит к изменению режима, как это и следует из рис. 35-8, б.
У невозбужденной явнополюсной машины электромагнитный момент развивается исключительно вследствие действия поля реакции якоря при наличии неравномерности воздушного зазора (ха =£■ Хд) и называется поэтому реактивным (см. также § 25-4).
Рис. 35-11. Векторные диаграммы реактивной синхронной машины при работе на холостом ходу (а), в режиме генератора (б) и двигателя (в)
Реактивный режим работы может возникнуть, например, в случае, когда при параллельной работе с сетью явнополюсный генератор по какой-либо причине теряет возбуждение (неисправность возбудителя, ложное срабатывание автомата гашения поля и т. д.) и был при этом слабо загружен. Последнее обстоятельство существенно потому, что предельная мощность, которую может развить генератор в этом режиме, невелика. Действительно, по формуле (35-10) в относительных единицах получим
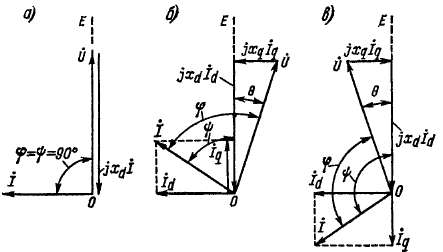 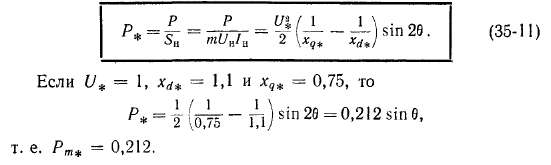
Машина в этом режиме потребляет большой реактивный ток для создания магнитного поля. На холостом ходу (6=0)
/ = U/xd
и, например,, при U* = 1 и xd* = 1,1 будет /* = 0,91.
Строятся также синхронные двигатели малой мощности, лишенные обмотки возбуждения и называемые реактивными (см. § 41-3).
На рис. 35-11 изображены векторные диаграммы явно-полюсной машины при работе без возбуждения, причем штриховой линией показано направление э. д с. Е, которая индуктировалась бы при наличии возбуждения. При этом, как и в гл. 33, на диаграммах представлены токи, отдаваемые машиной в сеть. В соответствии с этим на рис 35-11, как и в режиме недовозбуждения (Е < U), ток опережает напряжение. Возбужденная явнополюс-ная машина. В этом случае оба члена равенства (35-4) отличны от нуля и машина развивает мощность как за счет электромагнитного момента, создаваемого с участием потока возбуждения,
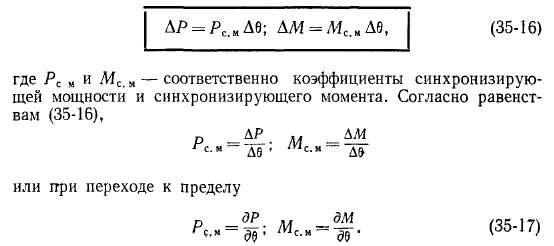
так и за счет реактивного электромагнитного момента. На рис. 35-12 изображены кривые 1 и 2 обеих составляющих мощности и кривая 3 суммарной мощности.
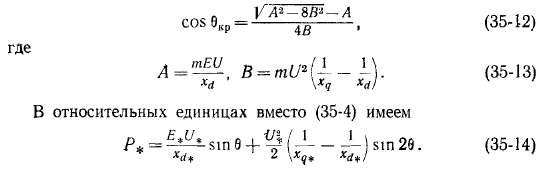
Максимальная мощность и предел устойчивости работы в данном случае наступают при критическом угле бкр. значение которого определяется равенством
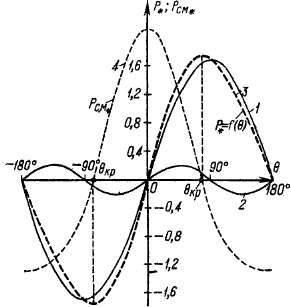 Рис 35-12 Угловая характеристика активной мощности возбужденного явнополюс-ного генератора при Е^ = 1,87, £/„ = 1, *<**= 1-1. *?* = 0,75
 Вторая составляющая мощности в данном случае равна 19% от всей мощности. Таким образом, в нормальных режимах работы эта составляющая сравнительно мала. У генератора с приведенными данными при £„. = 1,87 и U% = 1 критический угол нагрузки 8кр = 77° и предельная мощность Рт* = 1,75, т. ,е. примерно в два раза больше номинальной активной мощности (/>„ = 0,8).
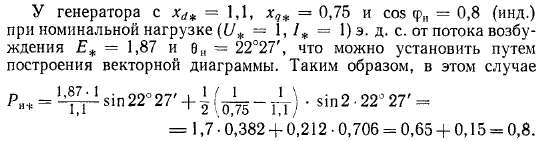
Угловая характеристика реактивной мощности. Наряду с рассмотренными выше^характеристиками активной мощности представляют интерес также угловые характеристики реактивной мощности Q.
Реактивная мощность
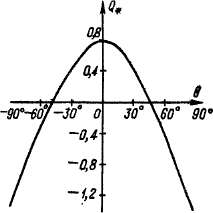 Рис. 35-13. Угловая характеристика реактивной мощности явнополюсного генератора
 Так как косинус — функция четная, то при прочих равных условиях эта характеристика для режимов генератора и двигателя одинакова.
Кривая Q# — f (б) по формуле (35-15) для перевозбужденной синхронной машины при Е* — 1,87, £/„ = 1, ха* = 1,1, х?* = = 0,75 изображена на рис. 35-13. Из этой кривой видно, что если при 6=0 генератор отдает в сеть реактивную мощность, то с увеличением 6 величина Q начинает падать и при некотором б изменяет знак, т. е. машина начинает потреблять реактивную мощность из сети. Это является следствием того, что при Е = const и U = const в случае увеличения активной нагрузки вектор / непрерывно
поворачивается против часовой стрелки и при некотором 8 начинает опережать 0. Такой характер изменения / следует из рассмотрения векторных диаграмм рис. 33-2, 33-3 и др.
Рассмотренные выше выражения угловых характеристик дают правильные результаты, если в них подставляются насыщенные значения параметров. Поскольку эти значения в большинстве случаев неизвестны, то расчеты по этим выражениям часто выполняются при подстановке ненасыщенных значений параметров. При этом значения максимальной мощности получаются заниженными на 8—12%, а значения углов бкр — завышенными на 8—15%. Значение угла 9 при Р = Рн также получается завышенным.
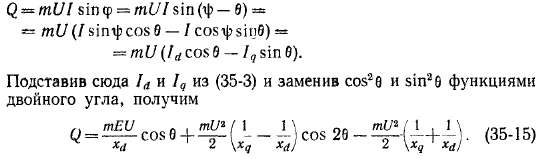
§ 35-4. Синхронизирующая мощность, синхронизирующий момент и статическая перегружаемость синхронных машин
Синхронизирующая мощность и синхронизирующий момент.
В § 35-3 было выяснено, что в определенных пределах значений угла нагрузки 8 синхронная машина способна сохранять синхронный режим работы. Это обусловлено тем, что при отклонении угла 8 от своего устойчивого установившегося значения на некоторую величину А 6 возникает разность АР между подводимой к машине мощностью и отдаваемой ею мощностью (рис. 35-9), под воздействием которой устойчивое состояние работы восстанавливается. Мощность АР поэтому называется синхронизирующей мощностью. Этой мощности, согласно выражению (35-7), соответствует электромагнитный момент AM, под воздействием которого ротор несколько ускоряется или замедляется и тем самым возвращается в равновесное положение. Момент AM поэтому также называется синхронизирующим.
Если отклонение А в мало, то АР и ДМ пропорциональны Аб (см. рис. 35-9):
На основании выражений (35-4) и (35-17)
Для неявнополюсной (xq = xd) и реактивной (Е = 0) машин выражения (35-18) и (35-19) соответственно упрощаются.
Кривые Рс-М по формуле (35-18) изображены на рис. 35-9 и 35-12 штриховыми линиями. Как следует из этих рисунков и неравенства (35-8), режим работы синхронной машины устойчив, когда Рс м > 0 и Afc. м > 0. Положительный знак этих коэффициентов поэтому является одним из критериев устойчивости статического режима работы. С другой стороны, очевидно, что синхронизирующие электромагнитные силы при прочих равных условиях тем больше, чем больше Рс м и Мс. м. Поэтому из выражений (35-18) и (35-19) можно сделать вывод, что при различных возмущениях перевозбужденная синхронная машина (Е >> U) в большей степени способна сохранять устойчивый режим работы, чем недовозбужденная (Е < U). На границе зоны устойчивой работы (б = екр) имеем Рс „•= 0 и Мс. „ = 0.
Статическая перегружаемость. Когда мощность синхронной машины Р = 0, также 8=0. При увеличении Р растет также 6, и при 6 = б Кр мощность достигает максимального значения Р = Рт. При дальнейшем увеличении механической мощности на валу машина выйдет из синхронизма и ее ротор будет вращаться асинхронно, с некоторым скольжением s относительно поля статора (поля реакции якоря). У двигателя скорость ротора будет меньше синхронной (s > 0) и у генератора — больше синхронной (s<0). Подобный асинхронный режим является ненормальным и недопустим, так как он опасен для машины и нарушает нормальную работу сети, машин и механизмов, соединенных с синхронной машиной. Поэтому при эксплуатации синхронных машин необходимо заботиться о том, чтобы их устойчивая синхронная работа была в достаточной степени обеспечена.
При работе синхронные машины могут подвергаться кратковременным перегрузкам. Кроме того, вследствие уменьшения напряжения, например, при коротких замыканиях в сети максимальная мощность Рт, которую способна развивать машина, снижается [см. равенство (35-6) и др.]. Поэтому необходимо, чтобы машина имела достаточный запас мощности, т. е. чтобы значение Рт было достаточно велико.
Статическая перегружаемость синхронной машины кп характеризуется отношением Рт при U = £/„ и if — ifж к номинальной мощности Ря:
Выражения (35-23) и (35-24) приводятся в ГОСТ 533—68 на турбогенераторы.
Согласно этому стандарту, статическая перегружаемость турбогенераторов мощностью до 300 000 кет должна быть не менее
ka =1,7, а для турбогенераторов мощностью 500 000— 800 000 кет — не менее kn = = 1,6. Как следует из изложенного, статическая пере-гружаемость турбогенераторов, как, впрочем, и явно-полюсных машин, тем больше, чем больше их о. к. з., т. е. чем меньше Ха* или чем больше воздушный зазор.
0,4 0,8 4,2 4,6 2,0
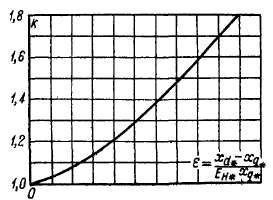
Рис. 35-14. Кривая коэффициента k, учитывающего влияние реактивного момента явнополюсной машины на статическую перегружаемость
Статическая перегружае-мость явнополюсных машин также выражается равенствами (35-22) — (35-25), если в них вводится добавочный множитель k,
который учитывает влияние второго члена равенства (35-4). Величина k при этом определяется графиком рис. 35-14, где
Статическая перегружаемость как явнополюсных, так и неяв-нополюсных синхронных двигателей с cos фн = 0,9 (режим перевозбуждения), согласно ГОСТ 183—66, должна быть не менее ka = 1,65. Статическая перегружаемость гидрогенераторов, согласно ГОСТ 5616—72, должна быть не ниже kn = 1,7.
§ 35-5. Работа синхронной машины при постоянной мощности и переменном возбуждении
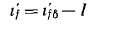
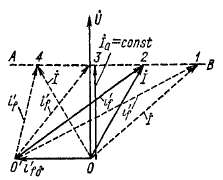
Как было выяснено в § 35-2, изменение тока возбуждения вызывает изменение только реактивных составляющих тока и мощности якоря. Рассмотрим теперь зависимость величины тока / от тока возбуждения if при Р — const в случае параллельной работы машины с сетью бесконечной мощности (U — const, / = const). Для лростоты определим эту зависимость для неявнополюсной машины (рис. 35-15), так как получаемые при этом результаты характерны также для явнополюсной машины, причем будем рассматривать приведенные к обмотке якоря значения тока возбуждения.
При Р = const активная составляющая тока Ia = const. Поэтому на векторной диаграмме рис. 35-15 конец вектора / скользит по прямой АВ. Если положить для простоты хаа = О, то внутренняя э. д. с. Ец = U = const и составляющая тока возбуждения tfo, создающая результирующий поток Фа, также постоянна. Полный ток возбуждения
Рис 35-15 Упрощенная векторная диаграмма неявнополюсного синхронного генератора
легко определяется по диаграмме. Конец вектора ij находится в точке О', а его начало, очевидно, также скользит по прямой АВ. На рис. 35-15 сплошными линиями построена диаграмма токов для одного значения if, а штриховыми линиями — несколько
диаграмм для других значений if. Концы векторов / и начала векторов if располагаются в точках /, 2, 3, 4 на прямой АВ.
Из рис. 35-15 следует, что при непрерывном изменении if ток / и cos ф также беспрерывно изменяются, причем при некотором значении i\ величина / минимальна и cos ф =.1, а при увеличении if (режим перевозбуждения) и уменьшении ij (режим недовозбуждения) против указанного значения if величина тока / возрастает, так как растет его реактивная составляющая. Более точно зависимость / = /(tf) можно определить путем построения точных векторных диаграмм. На рис. 35-16 представлен характер зависимостей / = / (ij) О при разных значениях Р = const.
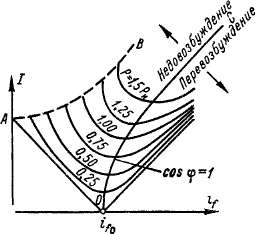 Рис 35-16. U-образные характеристики синхронной машины
Эти зависимости по виду называются также U-образными характеристиками. Минимальное
значение / для каждой кривой определяет активную составляющую тока якоря 1а и величину мощности
Р = тШ„,
для которой построена данная кривая. Нижняя кривая соответствует Р = О, причем ij0 — значение тока возбуждения при Е = U. Правые части кривых соответствуют перевозбужденной машине
и отдаче в, сеть индуктивного тока и реактивной мощности, а левые части — недовозбужденной машине, отдаче в сеть емкостного тока и потреблению реактивной мощности. Кривая ср = 0 или cos ср = 1 отклоняется при увеличении мощности вправо, так как вследствие падения напряжения хаа1 возрастает значение Ее, и необходимый ток возбуждения при cos ср = 1. Кривая ОС на рис. 35-16 в сущности является регулировочной характеристикой машины при cos ф = 1 (см. рис. 33-11).
Точка А на рис. 35-16 соответствует холостому ходу невозбужденной машины. При этом из сети потребляется намагничивающий ток
Угол нагрузки 8 возрастает при движении вдоль кривых рис. 35-16 справа налево, так как, согласно равенству (35-4), при меньших if и Е угол 9 при Р = const увеличивается. Линия АВ представляет собой границу устойчивости, на которой 8 = 9Kp-При дальнейшем уменьшении if машина выпадает из синхронизма. U-образные характеристики генератора и двигателя практически не отличаются друг от друга.
Содержание
Предыдущий § Следующий
| 