|
Содержание
Предыдущий § Следующий
Глава двадцать восьмая ПУСК ТРЕХФАЗНЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ И РЕГУЛИРОВАНИЕ ИХ СКОРОСТИ ВРАЩЕНИЯ
§ 28-1. Способы пуска асинхронных двигателей
Общая характеристика вопроса. Прямой пуск. При рассмотрении возможных способов пуска в ход асинхронных двигателей необходимо учитывать следующие основные положения: 1) двигатель должен развивать при пуске достаточно большой пусковой момент, который должен быть больше статического момента сопротивления на валу, чтобы ротор двигателя мог прийти во вращение и достичь номинальной скорости вращения; 2) величина пускового тока должна быть ограничена таким значением, чтобы не происходило повреждения двигателя и нарушения нормального режима работы сети; 3) схема пуска должна быть по возможности простой, а количество и стоимость пусковых устройств — малыми.
При пуске асинхронного двигателя на холостом ходу в активном сопротивлении его вторичной цепи выделяется тепловая энергия, равная кинетической энергии приводимых во вращение маховых масс, а при пуске под нагрузкой количество выделяемой энергии соответственно увеличивается. Выделение энергии в первичной цепи обычно несколько больше, чем во вторичной. При частых' пусках, а также при весьма тяжелых условиях пуска, когда маховые массы приводимых в движение механизмов велики, возникает опасность перегрева обмоток двигателя. Подробно динамика движения электропривода и энергетические соотношения при пуске рассматриваются в курсах электропривода. Число пусков асинхронного двигателя в час, допустимое по условиям его нагрева, тем больше, чем меньше номинальная мощность двигателя и чем меньше соединенные с его валом маховые массы. Двигатели мощностью 3—10 кет в обычных условиях допускают до 5—10 включений в час.
Асинхронные двигатели с короткозамкнутым ротором проще по устройству и обслуживанию, а также дешевле и надежнее в работе, чем двигатели с фазным ротором.
Поэтому всюду, где это возможно, применяются двигатели с короткозамкнутым ротором и подавляющее большинство находящихся в эксплуатации асинхронных двигателей являются двигателями с короткозамкнутым ротором.
Наиболее простым способом пуска двигателя с короткозамкнутым ротором является включение обмотки его статора непосредственно в сеть, на номинальное напряжение обмотки статора (рис. 28-1, а).Такой пуск называется прямым.
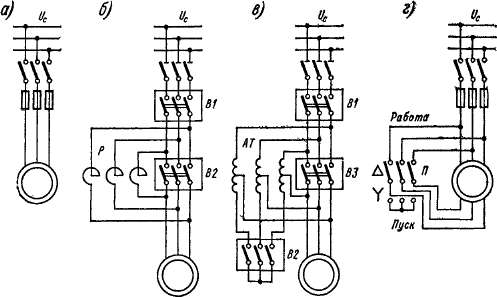 Рис. 28-1. Схемы способов пуска двигателей с короткозамкнутым ротором: а — прямой; б — реакторный; в — автотрансформаторный; г — с переключением со звезды на треугольник
При этом пусковой ток двигателя /„ = (4 ч- 7,0) /н.
Современные асинхронные двигатели с короткозамкнутым ротором проектируются с таким расчетом, чтобы они по величине возникающих при пуске электродинамических усилий, действующих на обмотки, и по условиям нагрева обмоток допускали прямой пуск. Поэтому прямой пуск всегда возможен, когда сеть достаточно мощна и пусковые токи двигателей не вызывают недопустимо больших падений напряжения в сети (не более 10—15%). Современные энергетические системы, сети и сетевые трансформаторные подстанции обычно имеют такие мощности, что в подавляющем большинстве случаев возможен прямой пуск асинхронных двигателей.
Нормальным способом пуска двигателей с короткозамкнутым ротором поэтому является прямой пуск.
Нередко таким образом осуществляется пуск двигателей мощностью в тысячи киловатт.
Если по условиям падения напряжения в сети прямой пуск двигателя с короткозамкнутым ротором невозможен, применяются различные способы пуска двигателя при пониженном напряжении (рис. 28-1, б, в и г). Однако при этом пропорционально квадрату напряжения на зажимах обмотки статора или квадрату пускового тока двигателя понижается также пусковой момент, что является недостатком пуска при пониженном напряжении.
Поэтому эти способы пуска применимы, когда возможен пуск двигателя на холостом ходу или под неполной нагрузкой. Необходимость пуска при пониженном напряжении встречается чаще всего у мощных высоковольтных двигателей.
Реакторный пуск осуществляется согласно схеме рис. 28-1, б. Сначала включается выключатель В1, и двигатель получает питание через трехфазный реактор (реактивную или индуктивную катушку) Р, сопротивление которого хр ограничивает величину пускового тока. По достижении нормальной скорости вращения включается выключатель В2, который шунтирует реактор, в результате чего на двигатель подается нормальное напряжение сети.
Пусковые реакторы строятся обычно с ферромагнитным сердечником (см. § 18-4) и рассчитываются по нагреву только на кратковременную работу, что позволяет снизить их вес и стоимость. Для весьма мощных двигателей применяются также реакторы без ферромагнитного сердечника, с обмотками, укрепленными на бетонном каркасе. Выключатель В1 выбирается на такую отключающую мощность, которая позволяет отключить двигатель при глухом коротком замыкании за выключателем, а выключатель В2 может иметь низкую отключающую мощность.
Если составляющие сопротивления короткого замыкания двигателя равны гк и хк, то начальный пусковой ток при прямом пуске
а при реакторном пуске, при пренебрежении активным сопротивлением реактора,
Следовательно, при реакторном пуске начальный пусковой ток уменьшается в
раз. Во столько же раз уменьшается также напряжение на зажимах двигателя в начальный момент пуска. Начальный пусковой момент при реакторном пуске Мп.р уменьшается- по сравнению с моментом при прямом пуске Мпп в
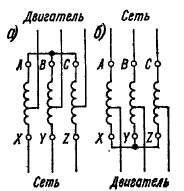
Рис. 28-2. Прямая (а) и обратная (б) схемы включения пусковых автотрансформаторов
раз.
В приведенных соотношениях не учитывается изменение величины хк при изменении величины пускового тока. При необходимости нетрудно учесть это изменение.
Автотрансформаторный пуск осуществляется по схеме рис. 28-1, б в следующем порядке. Сначала включадатся выключатели В1 и В2, и на двигатель через автотрансформатор AT подается пониженное напряжение. После достижения двигателем определенной скорости выключатель В2 отключается, и двигатель получает питание через часть обмотки автотрансформатора AT, который в этом случае работает как реактор. Наконец включается выключатель ВЗ, в результате чего двигатель получает полное напряжение.
Выключатель В1 должен быть выбран на отключающую мощность при коротком замыкании, а выключатели В2 и ВЗ могут иметь, меньшие отключающие мощности. Пусковые автотрансформаторы рассчитываются на кратковременную работу. Согласно ГССТ 3211—46, пусковые автотрансформаторы должны иметь ответвления, соответствующие величинам вторичного напряжения, равным 73, 64 и 55% от первичного при прямой схеме включения и 45, 36 и 27% при обратной схеме включения (рис. 28-2). В каждом конкретном случае выбирается подходящая ступень напряжения.
Если пусковой автотрансформатор понижает пусковое напряжение двигателя в &ат раз, то пусковой ток в двигателе или на стороне НН автотрансформатора /„ „ уменьшается также в kaT раз, а пусковой ток на стороне ВН автотрансформатора или в сети 1ПС уменьшается в k'aT раз. Пусковой момент Мп, пропорциональный квадрату напряжения на зажимах двигателя, уменьшается также в klT Раз-
Таким образом, при автотрансформаторном пуске Мп и / уменьшаются в одинаковое число раз. В то же время при реакторном пуске пусковой ток двигателей /п д является также пусковым током в сети /п с и пусковой момент М„ уменьшается быстрее пускового тока (в квадратичном отношении). Поэтому при одинаковых величинах /п с при автотрансформаторном пуске пусковой момент будет больше. Однако это преимущество автотрансформаторного пуска достигается ценой значительного усложнения и удорожания пусковой аппаратуры. Поэтому автотрансформаторный пуск применяется реже реакторного, при более тяжелых условиях, когда реакторный пуск не обеспечивает необходимого пускового момента.
Пуск переключением «звезда — треугольник» (рис. 28-1, г) может применяться в случаях, когда выведены все шесть концов обмотки статора и двигатель нормально работает с соединением обмотки статора в треугольник, например, когда двигатель на 380/220 в и с соединением обмоток Y/A работает от сети 220 в. В этом случае при пуске обмотка статора включ'ается в звезду (нижнее положение переключателя П на рис. 28-1, г), а при достижении нормальной скорости вращения переключается в треугольник (верхнее положение переключателя П на рис. 28-1, г). При таком способе пуска по сравнению с прямым пуском при соединении обмотки в треугольник напряжение фаз обмоток уменьшается в У"3 раза, пусковой момент уменьшается в (]/3)а = 3 раза, пусковой ток в фазах обмотки уменьшается в Y% раза, а в сети — в j/З -1/3 =3 раза. Таким образом, рассматриваемый способ пуска равноценен автотрансформаторному пуску при &ат = ]/31.
Недостатком этого способа пуска по сравнению с реакторным и автотрансформаторным является то, что при пусковых переключениях цепь двигателя разрывается, что связано с возникновением коммутационных перенапряжений. Этот способ ранее широко применялся при пуске низковольтных двигателей, однако с увеличением мощности сетей потерял свое прежнее значение и в настоящее время используется сравнительно редко.
Пуск двигателя с фазным ротором с помощью пускового реостата. Двигатели с фазным ротором применяются значительно реже двигателей с короткозамкнутым ротором. Они используются в следующих случаях: 1) когда двигатели с короткозамкнутым ротором неприемлемы по условиям регулирования их скорости вращения (см. § 28-2); 2) когда статический момент сопротивления на валу при пуске Мст велик и поэтому асинхронный двигатель с коротко-замкнутым ротором с пуском при пониженном напряжении неприемлем, а прямой п^ск такого двигателя недопустим по условиям воздействия больших пусковых токов на сеть; 3) когда прийодимые
в движение массы настолько велики, что выделяемая во вторичной цепи двигателя тепловая энергия вызывает недопустимый нагрев обмотки ротора в виде беличьей клетки.
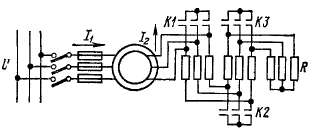
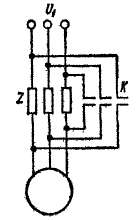
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора (рис. 28-3). Применяются проволочные, с литыми чугунными элементами, а также жидкостные реостаты. По условиям нагрева реостаты рассчитываются на кратковременную работу. Сопротивления металлических реостатов для охлаждения обычно помещают в бак с трансформаторным маслом. Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически (в автоматизированных установках) с помощью контакторов или контроллера с электрическим приводом. Жидкостный реостат с представляет собой сосуд с электролитом (например, водный раствор соды или поваренной соли), в который опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов.
Рассмотрим пуск двигателя с фазным ротором с помощью ступенчатого металлического реостата (рис. 28-3), управляемого контакторами К-
Перед пуском щетки должны быть опущены на контактные кольца ротора, а все ступени реостата включены. Далее в процессе пуска поочередно включаются контакторы КЗ, К2, К1- Характеристики вращающего момента двигателя М = / (s) и вторичного тока /2 = = / (s) при работе на разных ступенях реостата изображены на рис. 28-4, а и б. Предположим, что сопротивления ступеней пускового реостата и интервалы времени переключения ступеней подобраны так, что момент двигателя М при пуске меняется в пределах от некоторого Мма((С до некоторого Ммин и при включении в сеть Мп = Ммакс > Л4СГ (кривая 3 на рис. 28-4, а). В начале пуска двигатель работает по характеристике 3, ротор приходит во вращение, скольжение s начинает уменьшаться, и при s = s3, когда М = ММИн> производится переключение реостата на вторую ступень. При этом двигатель будет работать по характеристике 2, и при дальнейшем разбеге двигателя скольжение уменьшится от s = s3 до s — s2, а момент —- от 'значения М = Мшкс до М = Ммин. Затем производится переключение на первую ступень и т. д. После
Рис. 28-3. Схема пуска асинхронного двигателя с помощью пускового реостата
выключения последней ступени реостата двигатель переходит на работу по естественной характеристике 0 и достигает установившейся скорости вращения.
При наличии у двигателя короткозамыкающего механизма после окончания пуска щетки с помощью этого механизма поднимаются с контактных колец и кольца замыкаются накоротко, а реостат возвращается в пусковое положение. Тем самым пусковая аппаратура приводится в готовность к следующему пуску. Необходимо отметить, что дистанционное управление короткозамыкающим механизмом контактных колец сложно осуществить; это затрудняет
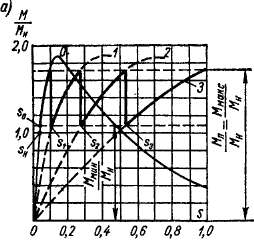 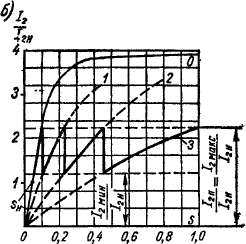 Рис 28-4 Последовательные изменения вращающего момента (а) и тока (б) пра реостатном пуске асинхронного двигателя
автоматическое управление двигателем. Поэтому в последнее время фазные асинхронные двигатели строятся без таких механизмов» При этом щетки постоянно налегают на контактные кольца, что несколько увеличивает потери двигателя и износ щеток. Количество-ступеней пускового реостата с целью упрощения схемы пуска и уде* шевления аппаратуры в автоматизированных установках выбирается небольшим (обычно 2—3 ступени).
Пусковые характеристики асинхронного, двигателя при реостат-' ном пуске наиболее благоприятны, так как высокие значения моментов достигаются при невысоких значениях пусковых токов.
Вопросы расчета пусковых реостатов в данной книге не рассматриваются (см. [24]).
Самозапуск асинхронных двигателей, В электрических сетях в результате коротких замыканий случаются кратковременные, длительностью до нескольких секунд, большие понижения напряжения или перерывы питания. Включенные в сеть асинхронные'двигатели при этом начинают затормаживаться и чаще всего полностью
останавливаются. При восстановлении напряжения начинается одновременный самозапуск ве отключившихся от сети двигателей. Такой самозапуск двигателей способствует быстрейшему восстановлению нормальной работы производственных механизмов и поэтому целесообразен, а в ряде случаев даже чрезвычайно желателен. Однако одновременный самозапуск большого количества асинхронных двигателей загружает сеть весьма большими токами, что вызывает в ней большие падения напряжения и задерживает процесс восстановления нормального напряжения. Время самозапуска двигателей при этом увеличивается, а в ряде случаев величина пускового мо--мента недостаточна для пуска двигателя. Кроме того, самозапуск некоторых двигателей в подобных условиях недопустим или невозможен (например, двигатели с фазным ротором с пуском с помощью реостата и двигатели с короткозамкнутым ротором с пуском с помощью реакторов и автотрансформаторов, не снабженные специальной автоматической аппаратурой для автоматического самозапуска). Поэтому целесообразно возможность самозапуска использовать только для двигателей наиболее ответственных производственных механизмов, а все остальные двигатели снабдить релейной защитой для их отключения от сети при глубоких падениях напряжения. Самозапуск асинхронных двигателей широко применяется в СССР для двигателей механизмов электрических станций.
§ 28-2. Регулирование скорости вращения асинхронных двигателей с короткозамкнутым ротором
Общие положения.
Скорость вращения ротора асинхронного двигателя
Способы регулирования скорости вращения асинхронных двигателей, согласно выражению (28-3), можно подразделить на два класса: 1) регулирование скорости вращения первичного магнитного поля
что достигается либо регулированием первичной частоты flt либо изменением числа пар полюсов р двигателя; 2) регулирование скольжения двигателя s при пх — const. В первом случае к. п. д. двигателя остается высоким^ а во втором случае к. п. д. снижается тем больше, чем больше s, так как при этом мощность скольжения (см. § 24-5)
теряется во вторичной цепи двигателя (мощность скольжения используется полезно только в каскадных установках — см. § 28-3).
Рассмотрим здесь главнейшие способы регулирования скорости вращения.
Регулирование скорости изменением первичной частоты (частотное регулирование) требует применения источников питания с регулируемой частотой (синхронные генераторы с переменной скоростью вращения, ионные или полупроводниковые преобразователи частоты и др.)- Поэтому данный способ регулирования используется главным образом в случаях, когда для целых групп двигателей необходимо повышать (п > 3000 об/мин) скорости вращения (например, ручной металлообрабатывающий инструмент, некоторые механизмы деревообрабатывающей промышленности и др.) или одновременно и плавно их регулировать (например, двигатели рольгангов мощных прокатных станов и др.). С развитием полупроводниковых преобразователей все более перспективным становится также индивидуальное частотное регулирование скорости вращения Двигателей. Схему короткозамкнутого асинхронного двигателя с частотным управлением при помощи полупроводниковых преобразователей можно получить, если на схеме рис. 11-14 заменить явно-полюсный ротор на ротор с обмоткой в виде беличьей клетки и питать эту схему от сети переменного тока через полупроводниковый выпрямитель. Управление инвертором при этом производится особым преобразователем частоты вне зависимости от положения ротора двигателя. Величина напряжения регулируется с помощью выпрямителя.
Если пренебречь относительно небольшим падением напряжения в первичной цепи асинхронного двигателя, то
Существенное изменение величины потока Ф при регулировании п нежелательно, так как увеличение Ф против нормального вызывает увеличение насыщения магнитной цепи и сильное увеличение намагничивающего тока, а уменьшение Ф вызывает недоиспользование машины, уменьшение перегрузочной способности и увеличение тока /2 при том же значении М [(см. равенство (25-11)] и т. д. Поэтому в большинстве случаев целесообразно поддерживать Ф = = const. При этом из соотношения (28-6) следует, что одновременно с регулированием частоты пропорционально ей необходимо изменять также напряжение, т. е. поддерживать
Отступление от этого правила целесообразно только в случаях, когда Мст быстро уменьшается с уменьшением п (например, приводы вентиляторов, когда М„ = п2). В этом случае более быстрое уменьшение Ux по сравнению с /L вызывает уменьшение Ф и улучшает энергетические показатели двигателя (cos фх и к. п. д. — см. § 29-7)

и в то же время уменьшение Мт с точки зрения перегрузочной способности не опасно.
При широком диапазоне регулирования правильнее поддерживать
O = £1/f1 = const.
К недостаткам частотного регулирования относится громоздкость и высокая стоимость питающей установки.
Регулирование скорости изменением числа пар полюсов р используется обычно для двигателей с короткозамкнутым ротором, так как при этом требуется изменять р только для обмотки статора. Изменять р можно двумя способами: 1) применением на статоре нескольких обмоток, которые уложены в общих пазах и имеют разные числа пар полюсов р; 2) применением обмотки специального типа, которая позволяет получить различные значения р путем изменения (переключения) схемы соединений обмотки. Предложено значительное количество различных схем обмоток с переключением числа пар полюсов, однако широкое распространение из них получили только некоторые. Применение нескольких обмоток невыгодно, так как при этом из-за ограниченного места с пазах сечение проводников каждой из обмоток нужно уменьшать, что приводит к снижению мощности двигателя. Использование обмоток с переключением числа пар полюсов вызывает усложнение коммутационной аппаратуры, в особенности, если с помощью одной обмотки желают получить более двух скоростей вращения. Несколько ухудшаются также энергетические показатели двигателей.
Двигатели с изменением числа пар полюсов называются много-скоростными, Обычно они выпускаются на 2, 3 или 4 скорости вращения, причем двухскоростные двигатели изготовляются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении р2 : pt = 2 : 1, трехскоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением Рг : Pi = 2 : 1, четырехскоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Например, двигатель на /х = 50 гц с синхронными скоростями вращения 1500/1000/750/500 об/мин имеет одну обмотку с переключением на 2р = 4 и 8 и другую обмотку с переключением на 2р = 6 и 12.
Многоскоростные двигатели применяются в металлорежущих и деревообрабатывающих станках, в грузовых и пассажирских лифтах, для приводов вентиляторов и насосов и в ряде других случаев.
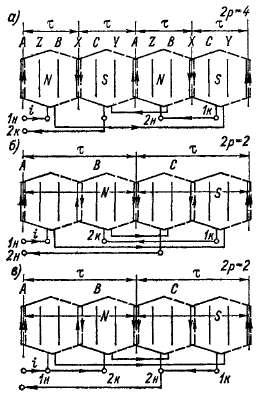
Каждая фаза обмотки с переключением числа пар полюсов в отношении 2 : 1 (рис. 28-5) состоит из двух частей, или половинок, с одинаковым количеством катушечных групп в каждой части.
Когда обе части обмотки обтекаются токами одинакового направления, обмотка создает магнитное поле с большим числом полюсов (рис. 28-5, а, 2р = 4), а при изменении направления тока в одной части обмотки на обратное число полюсов уменьшается вдвое (рис. 28-5, б и в, 1р = 2). Подобные переключения производятся во всех фазах одновременно, и переключаемые части обмотки могут
соединяться последовательно (рис. 28-5, а и б) или параллельно (рис. 28-5, в).
Ширина фазной зоны, занимаемой сторонами катушек катушечной группы, и величина шага обмотки в зубцовых делениях одинаковы при обоих числах полюсов. Поскольку, однако, при переключении числа пар полюсов в отношении 2 : 1 полюсное деление изменяется в два раза, то величина • фазной зоны в электрических градусах и относительный шаг обмотки при этом также изменяются в два раза.
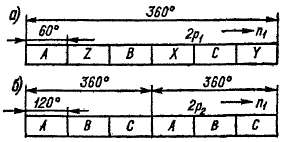
Переключаемую обмотку выполняют так, что при меньшем числе пар полюсов {р^ фазная зона а = 60° эл. Тогда при удвоенном числе пар полюсов (р2 = 2рх) ширина этой зоны, будет а = 120° эл. Нормальные чередования фазных зон при одинаковом направлении вращения магнитного поля для обеих скоростей вращения должны быть
такими, как показано на рис. 28-6. Из рисунка видно, что, кроме изменения направлений токов в зонах X, Y, Z (рис. 28-6, а) на обратные (т. е. обращение их в зоны А, В, С), для сохранения направления вращения поля, а следовательно, и ротора при переключении числа пар полюсов (рис. 28-6, б) необходимо также переключить концы двух фаз обмотки (например, фазы В и С).
Обмотка выполняется так, что ее шаг равен полному (180° эл.) при большем числе полюсов (2р2), так как кривая н. с. обмотки с зоной а = 120° наиболее близка к синусоидальной при полном шаге. Тогда при меньшем числе полюсов относительный шаг |J = = 0,5.
Рис. 28-5. Принципиальные схемы
одной фазы обмотки с переключением
числа полюсов: а — при 2р = 4;
б, в — при 2р = 2
Из сказанного следует, что обмотка с переключением числа по-люсо'в создает н. с. с большей величиной высших гармоник поля, чем нормальная трехфазная обмотка с а = 60° и р = 5/в. Это приводит к некоторому ухудшению энергетических показателей двигателей с переключением числа полюсов по сравнению с нормальными.
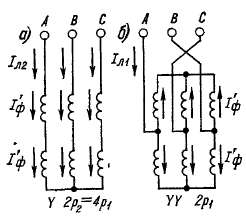
На рис. 28-7 и 28-8 представлены наиболее часто употребляемые схемы обмоток с переключением числа пар полюсов в отношении р2 ■" pi = 2 : 1. Определим мощности и моменты, развиваемые двигателями с такими схемами обмоток при неизменном линейном напряжении сети Un и наибольшем допустимом (номинальном) токе в полуфазе обмотки /ф. Пренебрегая разницей в условиях охлаждения при изменении скорости вращения, можно принять, что величина /ф одинакова при обеих скоростях вращения. Приближенно
Рис. 28-6. Чередование фазных зон обмотки с переключением полюсов в отношении 1 : 2
Рис. 28-7. Принципиальная схема соединений обмотки с переключением числа полюсов в отношении 2 : 1 при постоянном моменте
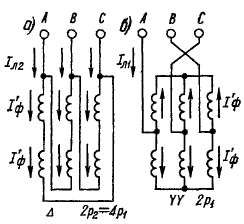
Рис. 28-8. Принципиальная схема соединений обмотки с переключением числа полюсов в отношении 2 : 1 при постоянной мощности
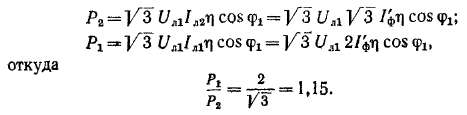
можно считать, что коэффициенты мощности и к. п. д. при одинаковых значениях /ф для обеих скоростей вращения также одинаковы. При указанных условиях мощности на валу для схем рис. 28-7, а и б соответственно равны:
Таким образом,
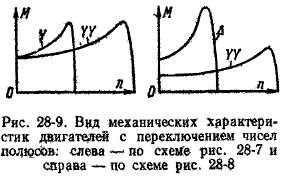
и, следовательно, при переходе of меньшей скорости вращения (рис. 28-7, а) к большей (рис. 28-7, б) допустимая мощность на валу увеличивается в два раза. Момент вращения при этом, очевидно, остается постоянным, и поэтому схема переключения Y/YY (рис.28-7) называется также схемой переключения,с М = const. При схемах рис. 28-8, а и б имеем соответственно:
Обычно при использовании схемы рис. 28-8 для обеих скоростей вращения указывается .одинаковая номинальная мощность, т. е*>
принимается, что Pi = Л% Схема переключения Д/Кк (рис 28-8) называется также; схемой переключения с Р *4 — const.
Вид механических харак* тертетик двигателей cq cxe| мами обмоток рис. 28-7 и 28^1 изображен на рис. 28-9.
При переключении ышоЩ, скоростной, обмотки магни*?
нще индукции на отдельных участках магнитной цепи в обще*| случае изменяются, что необходимо иметь в виду при проектирован нии Двигателя, чтобы, с одной стороны, добиться по возможности более полного использования материалов двигателя» а с другой^ не допустить чрезмерного насыщения магнитной, цеди.
Вес и стоимость многоекороетнш двигателей несколько больше^ чемг у нормальных асинхронных двигателей такой же мощности/ Тем не менее это лучший и наиболее широко применяемый сносок регулирования скорости "короткозамкнувдх двигателей.
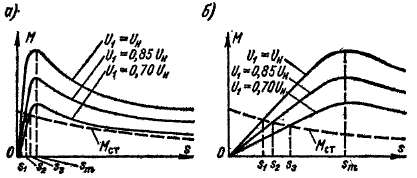
Регулирование скорости уменьшением величины первичного напряжения. При уменьшении Ux момент двигателя ^змеияется пропорционально Щ я соотйелгственво ваменяются механические ка^актеристики (рис. 28-10), в результате чего, наменяйтся также значения рабочих скольжений su\, s3... при данном виде зависимости Л1„ = / (s). Очевидно, что регулирование s в этом случае во»? можно в нределйх 0 < s < Sm. Для получения достаточно большого
диапазона регулирования скорости необходимо, чтобы активное сопротивление цепи ротора и соответственно sm были, достаточно велики (рис. 28-10, б).
Рис. 28-10. Механические характеристики асинхронных двигателей при различных величинах первичного напряжения
Следует учитывать, что во вторичной цепи возникают потери, равные мощности скольжения Ps и вызывающие повышенный нагрев ротора.
Этот метод регулирования скорости применяется также для двигателей с фазным ротором, причем в этом случае 9 о&пь ротора включаются добавочные сопротивления.
В связи с пониженным к. п. д. и трудностями регулирования напряжения рассматриваемый метод.йршеняется только для двигателей малой мощности. При этом для регулирования Ut можно использовать регулируемые автотрансформаторы или сопротивления, включенные последовательно в первичную день, В последние годы для этой цели все чаще применяют (рис, 28-11) реакторы насыщения, регулируемые путем додмагничивания постоянным током (см. § 18-4). При изменении величины постоянного тока подмагничива-ния индуктивное сопротивление реактора изменяется, что
приводит к изменению напряжения на зажимах -двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования скорости в область s >■ sm и получить при этом жесткие механические характеристики.
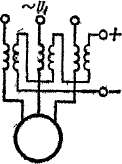 Рис. 28-11. Схема регулирования асинхронного двигателя с помощью реактора с под1-магничиванием постоянным током
Рис. 28-12. Схема импульсного регулирования скорости вращения асинхронного двигателя
Импульсное регулирование скорости (рис. 28-12) производится путем периодического включения двигателя в сеть и отключения его от сети или путем периодического шунтирования с помощью контактора К сопротивлений, включенных последовательно в цепь статора, или полупроводниковых вентилей. При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Подобное регулирование скорости применяется только для двигателей весьма малой мощности (Рн < 30 -т- 50 в/п).
Более подробно некоторые вопросы регулирования скорости вращения асинхронных двигателей рассматриваются в курсах электропривода.
§ 28-3. Регулирование скорости вращения асинхронных двигателей с фазным ротором
Для двигателей с фазным ротором можно в принципе использовать все те же способы регулирования скорости вращения, как и для двигателей с короткозамкнутым ротором (см. § 28-2). Однако на практике из числа этих способов для двигателей с фазным ротором применяется только способ регулирования скорости вращения с помощью реакторов насыщения. Ниже рассмотрим способы регулирования скорости вращения, которые специфичны для двигателей с фазным ротором и в которых используется возможность включения регулирующих устройств во вторичную цепь.
Регулирование скорости вращения с помощью реостата в цепи ротора производится по той же схеме рис. 28-3, что и реостатный пуск двигателя, но реостат при этом должен быть рассчитан на длительную работу. При увеличении активного сопротивления вторичной цепи вид механической характеристики двигателя изменяется (см. рис. 28-4, а): характеристика становится более мягкой и скольжение двигателя при том же моменте нагрузки Мст увеличивается.
При М„ =? const рабочее скольжение s с большой точностью пропорционально sm и, следовательно, активному сопротивлению цепи ротора. Поэтому скольжения s и s', соответствующие случаям гД = 0 и гд =f= 0, находятся в соотношении
Рассматриваемый способ регулирования скорости связан со значительными потерями энергии в сопротивлении гд и поэтому малоэкономичен. Он применяется главным образом при кратковременной или повторно-кратковременной работе (например, пуско-наладочные режимы некоторых машин, крановые устройства и пр.), а также в приводах с вентиляторным моментом. В последнем случае мощность на валу с уменьшением скорости быстро снижается, и поэтому мощность скольжения и потери в цепи ротора по величине ограничены.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Регулирование скорости вращения посредством введения добавочной э. д. с. во вторичную цепь двигателя.
Регулирование скорости вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения
большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом к. п. д. установки.
Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам фазного двигателя приемник электрической энергии в виде подходящей для этой цели вспомогательной электрической машины.
Эта машина будет работать в режиме двигателя и оказывать воздействие на регулируемый асинхронный двигатель, развивая напряжение на его вторичных зажимах, так как при вращении вспомогательной машины в ее якоре индуктируется э. д. с. Можно также сказать, что задачей вспомогательной машины, как и реостата при реостатном регулировании, является создание «подпора» напряжения на контактных кольцах регулируемого асинхронного двигателя, ибо наличие определенного напряжения на кольцах U2K — непременное условие выдачи с этих колец определенной мощности
РSK = m2U2KI2 cos ф2
во внешнюю цепь двигателя. Вместе с тем, вспомогательная машина
в отличие от реостата позволяет полезно использовать эту мощность.
Прежде всего рассмотрим вопрос о влиянии на работу фазного
асинхронного двигателя внешней добавочной э. д. с. £д, вводимой
во вторичную цепь двигателя с помощью его контактных колец, при условии, что частота этой добавочной э. д. с. всегда равна частоте вторичного тока и э. д. с. /2 = s/i самого двигателя.
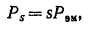
На рис. 28-13, а изображена векторная диаграмма вторичной цепи асинхронного двигателя при ЕА — 0. Вторичный ток двигателя
имеет величину, необходимую для создания нужного электромагнитного момента М в соответствии с величиной момента нагрузки М„ на валу.
 Рис, 28-13. Векторные диаграммы вторичной цепи асинхронного двигателя при отсутствии добавочной э. д. с. (а) и при введший этой э. д. с, для уменьшения (б) и увеличения (в) скорости вращения
Если теперь so вторичную цепь ввести э. д. с. Еж встречно э. д. с. скольжения £«« в этой же цепи, то вторичный ток
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s — увеличиваться. При этом, согласно равенству (28-Ш), ток 1г, а вместе с ним и момент М будут увеличиваться. Это будет происхбдить до тех пор, пока опять не наступит равновесие моментов М = М„ на валу. Двигатель при этом будет работать с увеличенным скольжением s, а векторная диаграмма вторичной цепи приобретет вид, изображенный на рис. 28-13, б. Очевидно, что посредством регулирования величины ЕА можно регулировать величину s и, следовательно, скорость вращения двигателя.
Предположим теперь, что э. д с. £д имеет по сравнению с рассмотренным случаем противоположное направление и совпадает
 
В первый момент после введения э, д. с. Ея ток /2 и момент ЛЯ возрастут, двигатель будет ускоряться и s будет уменьшаться. При достаточной величине £д величина s уменьшится до нуля, и если ток /2, создаваемый в этом случае только за счет действия Еж, все еще будет велик по сравнению с током, необходимым для создания момента М — МСт, то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и э. д. с. Ёц при этом изменят знаки и будут расти по абсолютной величине до тех пор, пока в соответствии с выражением (28-11) ток не упадет до
необходимой величины. При s < О угол чр2 = aretjg отрицали тельный й векторная диаграмма вторичной цепи двигателя имеет
вид, показанный на рис. 28-13, в. Ток \% при этом будет иметь составляющую, совпадающую с Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos <p двигателя повысится.
Таким образом, с помощью добавочной э. д. с. £д, путем изменения ее величины и направления, можно осуществить плавной двухзонное регулирование скорости двигателя: ниже и выще синхронной.
Если пренебречь потерями, то мощность источника добавочной э. д. с. равна мощности скольжения sPm, причем при s > 0 этот источник является приемником и потребляет энергию из вторичной цепи двигателя, а при s < 0 — генератором и отдает мощность во вторичную цепь двигателя. Механическая мощность, развиваемая магнитным полем двигателя,
при s > 0 будет меньше Рш, а при s < 0 в соответствии с изменением знака мощности скольжения Рш > Рэя.
Каскад асинхронного двигатели с машиной постоянного тока.
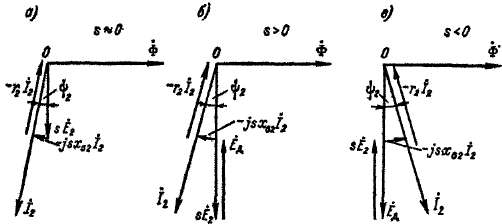
Реализация рассмотренного способа регулирования скорости вращения асинхронного двигателя посредством добавочной э. д. с. осуществляется в каскадных соединениях двигателя со вспомогательными электрическими машинами. Рассмотрим здесь каскадные соединения асинхронного двигателя с машиной постоянного тока. На рис. 28-14, а показана схема каскада фазного асинхронного двигателя АД, приводящего в движение некоторую рабочую машину РМ, с машиной постоянного тока независимого возбуждения
 
МПТ. Цепь якоря МПТ приключена к контактным кольцам асинхронного двигателя через ионный или полупроводниковый выпрямитель В, соединенный по трехфазной мостовой схеме. Выпрямитель преобразовывает переменный ток частоты скольжения /2 = sfx во вторичной цепи АД в постоянный ток в цепи якоря МПТ. Э. д. с. якоря МПТ в данном случае и является той рассмотренной выше добавочной э. д. с. Ел, которая (в данном случае с помощью выпрямителя В) вводится во вторичную цепь двигателя АД. Регулирование величины этой э. д. с. и скорости вращения АД производится путем регулирования тока возбуждения МПТ.
На схеме рис. 28-14, а машина постоянного тока МПТ расположена на валу асинхронного двигателя АД. Она преобразовывает
 Рис. 28-14. Схемы электромеханического (а) и электрического (б) каскадов асинхронного двигателя АД с машиной постоянного тока МПТ
мощность скольжения Ps, потребляемую из вторичной цепи АД, в механическую мощность, которая через вал двигателя АД вместе с механической мощностью Рмх двигателя передается рабочей машине РМ. Такой каскад называется электромеханическим. Если при регулировании скорости вращения обеспечить полное использование мощности АД (Рх = Рн = const) и пренебречь потерями, то в этом каскаде мощность, передаваемая рабочей машине РМ,
также остается при всех скоростях постоянной и равной номинальной мощности. В связи с этим электромеханический каскад иногда условно называют также каскадом постоянной мощности. Необходимая номинальная мощность вспомогательной машины каскада (в данном случае МПТ) зависит от пределов регулирования скорости:
Каскад с выпрямителями допускает регулирование скорости только вниз от синхронной (s > 0). Если заменить выпрямитель управляемым ионным или полупроводниковым преобразователем, способным производить также обратное преобразование — постоянного тока в переменный, то можно осуществить также регулирование скорости вверх от синхронной (s < 0). Указанные на рис. 28-14 направления передачи мощности скольжения при s < 0 изменятся на обратные. Ввиду сложности системы управления таким преобразователем и других причин эти каскады до сих пор применения не получили. Ранее применялись также каскады, выполненные по схеме рис. 28-14, а, в которой вместо выпрямителя использовался одноякорный преобразователь переменного тока в постоянный (см. § 41-1).
На рис. 28-14, б изображена схема каскада, которая отличается от схемы рис. 28-14, а тем, что МПТ соединена механически со вспомогательной асинхронной или синхронной машиной ВМ. В этом каскаде мощность скольжения Р„ при s > 0 передается с помощью ВМ, работающей в режиме генератора, обратно в сеть переменного тока. При s < 0 ВМ работает в режиме двигателя. Такой каскад называется электрическим. В этом каскаде машине РМ передается только механическая мощность двигателя АД
которая при P\ — Pn — const уменьшается пропорционально скорости вращения. Момент на валу РМ при этом остается постоянным, вследствие чего такой каскад иногда условно называют также каскадом с постоянным моментом. Машины ВМ и МПТ на схеме рис. 28-14, б можно заменить трансформатором и полупроводниковым преобразователем постоянного тока в переменный и обратно.
Каскады позволяют осуществить экономичное и плавное регулирование скорости вращения асинхронного двигателя, однако вспомогательные машины и преобразователи удорожают установку. Поэтому каскады целесообразно применять только для привода мощных производственных механизмов, требующих регулирования скорости в достаточно широких пределах (например, прокатные станы, весьма мощные вентиляторы и др.). Рассмотренные выше каскадные соединения в связи с использованием в них ионных или полупроводниковых вентилей называют также вентильными каскадами.
Существуют также другие системы каскадов, в частности с использованием коллекторных машин переменного тока (см- § 42-3). Каскадные установки выполняются на мощности в сотни и тысячи киловатт с регулированием скорости вращения в пределах до 3 : 1 и больше.

Содержание
Предыдущий § Следующий
| 