|
Содержание
Предыдущий § Следующий
Глава двадцать седьмая АСИНХРОННЫЕ ДВИГАТЕЛИ С ВЫТЕСНЕНИЕМ ТОКА В ОБМОТКЕ РОТОРА
§ 27-1. Глубокопазные двигатели
Устройство и принцип работы.
В § 25-2 было выяснено, что для достижения хорошего к. п. д. асинхронные двигатели должны иметь малое скольжение (sH « л; 0,02 -f- 0,05), в соответствии с чем активное сопротивление обмоток ротора г2 у них должно быть достаточно мало. Однако, как было установлено там же, пусковой момент двигателя с таким сопротивлением обмотки ротора будет значительно меньше номинального. Это исключает возможность пуска таких двигателей с короткозамкнутым ротором под нагрузкой, а искажение кривой момента под воздействием высших гармоник поля может вызвать затруднения даже при пуске с небольшой нагрузкой. Для получения достаточного пускового момента необходимо увеличить г2. Таким образом, возникает задача создания таких асинхронных двигателей с короткозамкнутым ротором, у которых активное сопротивление обмотки ротора при пуске достаточно велико и уменьшается при-переходе к нормальному режиму работы. Эту задачу решают путем использования эффекта вытеснения тока в обмотке ротора, применяя обмотку специальной конструкции.
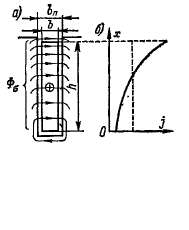
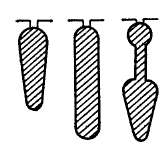
Одной из разновидностей таких двигателей являются двигатели с глубокими пазами на роторе (рис. 27-1, а) и высокими (30—60 мм) стержнями беличьей клетки. Вытеснение тока в стержнях клетки происходит в результате действия э. д. с, индуктируемых пазовыми потоками рассеяния Фа. Можно представить себе, что стержень (рис. 27-1, а) состоит из множества волокон, включенных параллельно. Нижние волокна охватываются большим, а верхние волокна — малым количеством линий потока Фо. При пуске, когда частота в роторе велика (/2 = /х), в нижних волокнах стержня индуктируется большая э. д. с. самоиндукции, чем в верхних, и> плотность тока распределяется по высоте проводника весьма неравномерно (рис. 27-1, б). Можно также сказать, что такое неравномерное распределение тока обусловлено тем, что нижние волокна стержня имеют большее индуктивное сопротивление, чем верхние. Таким образом, ток в стержне вытесняется по направлению к воздушному зазору, что в сущности и есть
проявление поверхностного эффекта в проводниках, утопленных в ферромагнитную среду.
Под влиянием вытеснения тока, или поверхностного эффекта, активное сопротивление стержня при пуске двигателя становится большим.
Несколько упрощенно можно представить себе, что при пуске работает только верхняя часть стержня и его рабочее сечение уменьшается. Одновременно при вытеснении тока уменьшается также индуктивное сопротивление рассеяния стержня, так как поток Фа в нижней части стержня вследствие уменьшения в ней тока ослабляется. В результате увеличения при пуске активного сопротивления стержня гст и уменьшения его сопротивления рассеяния лгост уменьшается угол сдвига фаз а|)2 между э. д. с. стержня, индуктируемой "вращающимся полем, и током стержня, что и приводит к увеличению пускового момента.
По мере разбега двигателя при его пуске частота тока в роторе уменьшается и по достижении номинальной скорости вращения становится весьма малой равномерно по сечению стержня. Активное сопротивление стержня при этом становится малым, и двигатель работает с хорошим к. п. д.
Параметры беличьей клетки. Вытеснение тока практически происходит только в той части обмотки ротора, которая расположена в пазах. Поэтому выражения для активного сопротивления ротора г'% и его индуктивного сопротивления рассеяния х'а2 можно представить в виде
где r'ia и x'ia — сопротивления пазовой части обмотки при равномерном распределении тока по сечению стержня; r'is, x'ix — сопротивления лобовых частей обмотки; kr, kx — коэффициенты, учитывающие изменение сопротивлений под влиянием вытеснения тока. Отметим, что величины х в выражениях (27-1) соответствуют частоте /а = /х.
 представляет собой так называемую эквивалентную глубину проникновения тока при поверхностном эффекте. Для приведения выражения (27-3) к виду, используемому на практике, введем в равенство (27-4) вместо удельной проводимости стержня у его удельное сопротивление р и учтем, что неполное заполнение паза по ширине проводником эквивалентно увеличению р в bjb раз (см. рис. 27-1). Подставив также
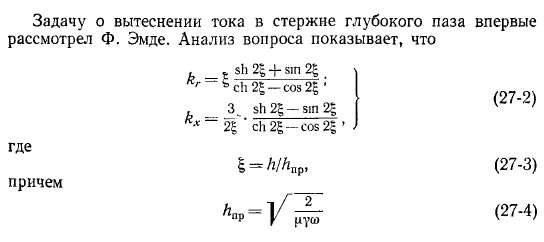
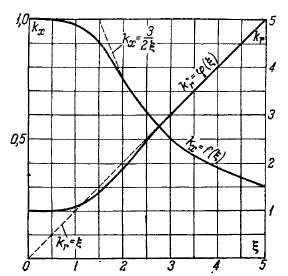
Графики kr = ф (|) и ^ = / (|) представлены на рис. 27-2.
При I > 2 можно пренебречь тригонометрическими функциями по сравнению с гиперболическими в выражениях (27-2) и положить sh 2| « ch 2£. Тогда вместо (27-2) имеем
Рис. 27-2. Коэффициенты активного (kr) и индуктивного (kx) сопротивлений стержня глубокопазного двигателя
Зависимости (27-8) показаны на рис. 27-2 штриховыми линиями.
Из рис. 27-2 и соотношений (27-6) и (27-7) следует, что влияние вытеснения тока при /i = 50 гц и s = 1 у медных стержней начинает практически проявляться при h > 1,0 см и у алюминиевых стержней при h> 1,4 см. Активное сопротивление медных стержней при h — 5 см и /i = 50 гц во время пуска (s = 1) будет в kr = 5 раз
больше, а сопротивление рассеяния стержня в \lkx = 3,33 р"аза меньше, чем в рабочем режиме.
Геометрическое место токов и характеристики. Схема замещения глубокопазного двигателя имеет ,обычный вид (см. рис. 24-6), и
следует лишь учесть, что вторичные сопротивления в соответствии с соотношениями (27-1) — (27-8) являются функциями скольжения s. Все необходимые расчеты (определение токов, вращающих моментов и т. д.) могут быть выполнены согласно схеме замещения и по соотношениям, приведенным в предыдущих главах. Так
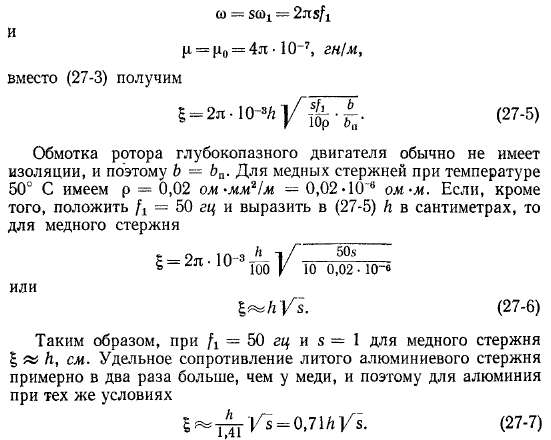
как параметры ротора глубокопазного двигателя переменны, то геометрическое место его токов является не окружностью, а более сложной кривой (рис. 27-3). Однако участок этой кривой, соответствующий малым скольжениям (например, при медных стержнях
 Рис. 27-3. Геометрическое место токов глубокопазного двигателя
с h = 5 см в области —0,05 < s < 0,05), с высокой точностью представляет собой дугу окружности. К. п. д. глубокопазных двигателей имеет такую же величину, как и к. п. д. двигателей с фазным или короткозамкнутым ротором без проявления вытеснения
тока. Однако cos q> глубокопазных двигателей на 0,02—0,04 меньше, так как обмотка ротора вследствие глубокого ее утопления в сердечнике имеет повышенное сопротивление рассеяния. В связи с этим кратность максимального момента глубокопазных двигателей также несколько меньше. В то же время у глубокопазных двигателей по сравнению с обычными двигателями кратность пускового момента больше, а кратность пускового тока меньше. Обычно у глубокопазных двигателей
На рис. 27-4 изображены характерные кривые моментов М = / (s) глубокопазного двигателя (кривая 2) и двигателя без явления вытеснения тока в обмотке ротора (кривая /).
§ 27-2. Двухклеточные двигатели
Устройство и принцип работы. Двухклеточные двигатели имеют на роторе две короткОзамкнутые беличьи клетки, одна из которых представляет собой так называемую пусковую обмотку, а вторая — рабочую. Рабочая обмотка выполняется из медных стержней и размещается в нижних частях пазов, а пусковая обмотка изготовляется из латунных или бронзовых стержней и располагается в верхних частях пазов, ближе к воздушному зазору (рис. 27-5, а слева). Сечение стержней пусковой обмотки может быть несколько меньше, чем у рабочей обмотки. Однако сечение и теплоемкость стержней пусковой обмотки должны быть достаточно велики, чтобы предотвратить чрезмерный нагрев этой обмотки при пуске. Иногда рабочую и пусковую обмотки размещают в отдельных пазах (рис. 27-5, а справа). В связи со сказанным активное
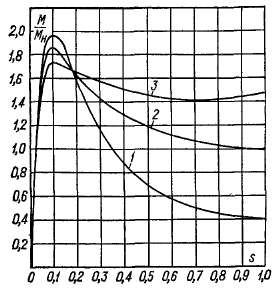 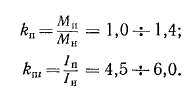 Рис. 27-4. Кривые моментов М = f (S) асинхронных двигателей
/ — без вытеснения тока в обмотке ротора; 2 — глубокопазного и 3 — двухклеточного
сопротивление пусковой обмотки гп обычно в 2—4 раза больше активного сопротивления гр рабочей обмотки. Наоборот, индуктивное сопротивление рассеяния пусковой обмотки хап в несколько раз меньше, чем хвр рабочей обмотки, поскольку последняя утоплена глубоко в стали сердечника ротора.
Вращающееся магнитное поле двигателя индуктирует в обеих обмотках ротора одинаковые э. д. с.
При пуске вследствие большой частоты тока ротора индуктивное сопротивление рабочей обмотки относительно велико и значительно больше полного сопротивления пусковой обмотки. Поэтому при пуске нагружена током в основном только пусковая обмотка, и ввиду большой величины ее активного сопротивления двигатель развивает большой пусковой момент. При разбеге двигателя частота тока ротора уменьшается, и при нормальной скорости вращения (s = 0,02 -ь 0,05) индуктивные сопротивления рассеяния обмоток ротора будут в 20—50 раз меньше, чем при пуске. Поэтому в рабочем режиме активные сопротивления обмоток ротора значительно больше индуктивных и полные сопротивления обмотки определяются величинами активных сопротивлений. Вследствие этого при работе двигателя полное сопротивление рабочей обмотки значительно меньше, чем полное сопротивление пусковой, и током нагружена главнйм образом рабочая обмотка. Ввиду малости активного сопротивления этой обмотки двигатель имеет хороший к. п. д.
Таким образом, в двухклеточном двигателе при пуске происходит вытеснение тока ротора по направлению к воздушному зазору, как и в глубокопазном двигателе,
В пусковой обмотке двух-клеточного двигателя при тяжелых условиях пуска (большой маховой момент приводимого агрегата и пуск под нагрузкой) выделяется боль- Рис 27.5 Пазы (а) и Короткозамыкаю-шое количество тепла, и эта щие кольца (б) ротора двухклеточного обмотка при пуске соответ-
ственно удлиняется, в то время как рабочая обмотка при пуске остается холодной и не удлиняется. Поэтому во избежание нарушения сварных соединений стержней с торцовыми короткозамыкающими кольцами стержни пусковой и рабочей обмоток присоединяются к отдельным кольцам (рис. 27-5, б).
Двухклеточные двигатели были предложены М. О. Доливо-Добровольским еще в 1893 г., однако широкое практическое применение их началось на 25—30 лет позднее.
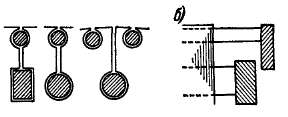 Рис. 27-5. Пазы (а) и короткозамыкаю-
щие кольца (б) ротора двухклеточного
двигателя
Схема замещения и ее параметры. Двухклеточный двигатель имеет две вторичные обмотки, и поэтому его схема замещения (рис. 27-6) содержит, подобно трехобмоточному трансформатору, две параллельно включенные вторичные цепи. Каждая из вторичных цепей имеет собственные активные сопротивления (гр, г'п) и индуктивные сопротивления рассеяния {x'v, х„). Кроме того, обе эти
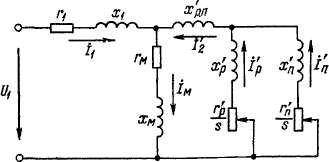 Рис. 27-6. Схема замещения двухклеточного двигателя
цепи имеют общее индуктивное сопротивление рассеяния по отношению к первичной обмотке х'р п, которое обтекается суммой токов обеих вторичных обмоток
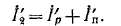
Наличие этого сопротивления объясняется тем, что при протекании тока в одной или обеих вторичных обмотках в верхней части
Рис. 27-7. Пазовые поля обмоток ротора двухклеточного двигателя
паза создается общий пазовый поток рассеяния, сцепляющийся с обеими обмотками (рис. 27-7, а) и индуктирующий в каждой из них одинаковую э. д. с.
пропорциональную сумме токов обеих вторичных обмоток. Этот поток является потоком рассеяния по отношению к первичной
   пропорциональную сумме токов обеих вторичных обмоток. Этот поток является потоком рассеяния по отношению к первичной
обмотке и потоком взаимной индукции по отношению к вторичным обмоткам.
Строгий в своей основе и удобный с практической точки зрения метод расчетно-теоретического определения параметров х'р, х„ и х'р, п заключается в следующем.
По картине пазового поля, создаваемого током рабочей обмотки (рис. 27-7, б), находится собственное потокосцепление стержня рабочей обмотки ¥р и взаимное потокосцепление со стержнем пусковой обмотки Wn р. Отношения
определяют собственную индуктивность стержня рабочей обмотки Lp и взаимную индуктивность стержней рабочей и пусковой обмоток .Мп.р от пазового поля.
Аналогично по картине поля, создаваемого током пусковой обмотки (рис. 27-7, в), находится собственное потокосцепление пусковой обмотки Wn и взаимное потокосцепление стержней обеих обмоток Wv п, а также собственная индуктивность стержня пусковой обмотки
и взаимная индуктивность стержней обеих обмоток
от пазового поля.
Очевидно, что Мпр = Мрп.
Индуктивности рассеяния стержней рабочей и пусковой обмоток соответственно равны:
Sp = Ip-Mn.p; 5n = Ln-Mn,p. (27-10)
Величины Lp, Ln и Мп_ р можно рассчитать методом, аналогичным рассмотренному ранее (см. § 23-3) методу расчета пазового рассеяния. К величинам Sp, Sn и Mv_ п необходимо прибавить соответствующие индуктивности от лобовых полей обмоток. Умножая найденные таким образом индуктивности на щ = 2nft и на коэффициент приведения сопротивлений k [см. равенство (24-32)], получим индуктивные сопротивления Хр, х'п и хп р схемы замещения рис. 27-6.
Из рис. 27-7, бив следует, что пазовый поток пусковой обмотки значительно меньше пазового потока рабочей обмотки. Кроме того, из рис. 27-7, в видно, что поток пусковой обмотки создает почти одинаковое потокосцепление с обеими обмотками. Поэтому
в соответствии с выражениями (27-10) 5П мало и По этой причине также
и иногда при проектировании двухклеточных двигателей принимают
Геометрическое место тюков и характеристики. Эквивалентное активное сопротивление г двух параллельных ветвей вторичной цепи схемы замещения (рис. 27-6) представляет собой более сложную
функцию скольжения, чем сопротивление вторичной цепи одноклеточного двигателя r'Js (рис. 24-6). Кроме того, и эквивалентное индуктивное сопротивление х этих ветвей (рис. 27-6) является функцией скольжения. Поэтому геометрическое место токов двухкле-точного двигателя (рис. 27-8) существенным образом отличается от окружности. Однако в области малых скольжений и в области s да 1 концы векторов тока перемещаются по кривым, которые с большой точностью представляют собой дуги некоторых окружностей (рис. 27-8). Способы построения этих окружностей описываются в ряде руководств [1, 3, 5, 21].
Для величин к. п. д., cos <p, максимального и пускового моментов и пускового тока в общем действительны замечания, сделанные в конце § 27-1 в отношении глубокопазного двигателя. Необходимо, однако, отметить, что при проектировании двухклеточных двигателей имеется возможность варьировать в определенных пределах сечения и удельные сопротивления стержней отдельных клеток, а также глубину утопления рабочей клетки. В связи с этим кратности пусковых моментов и токов у двухклеточных двигателей могут изменяться в более широких пределах. Обычно у двухклеточных двигателей
  Характерный вид зависимости М = f (s) двухклеточного двигателя представлен на рис. 27-4 (кривая .3).
§ 27-3. Другие разновидности асинхронных двигателей с вытеснением тока. Асинхронные двигатели отечественного производства
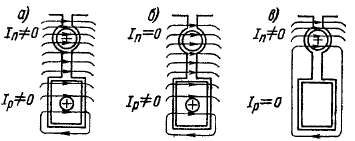
Из числа других конструктивных вариантов двигателей с вытеснением тока наряду с рассмотренными в 27-1 и 27-2 наибольшее распространение получили двигатели с колбовидной и трапецеидальной формой пазов (рис. 27-9). Форма выполнения короткозамкнутых колец при колбовидной форме пазов показана на рис. 27-9 справа.
Утолщение нижней части стержней (рис. 27-9) усиливает эффект изменения сопротивлений при вытеснении тока по сравнению с глубокопазным двигателем (см. рис. 27-1). Поэтому двигатели с пазами по схеме рис. 27-9 приближаются по своим свойствам к двухклеточным двигателям. В то же время в технологическом отношении изготовление двигателей с пазами по схеме рис. 27-9 проще, чем двухклеточ-ных. Наряду с двигателями с колбовидной и трапецеидальной формой паза для тяжелых условий пуска строятся также двух-клеточные двигатели. Для двигателей с Р„> 100 кет и 2р5=6 обычно применяются роторы с глубокими пазами.
В двигателях с короткозамкнутым ротором при 2р = 2 роторы часто приходится выполнять с круглыми пазами, так как небольшая высота ярма ротора не позволяет применять рассмотренные выше формы пазов. В этом случае короткозамыкающие кольца на обоих торцах ротора охватываются массивными стальными кольцами. При пуске токи в короткозамыкающих кольцах индуктируют в стальных кольцах большие токи, и в стальных кольцах возникают значительные потери. Это эквивалентно увеличению активного сопротивления вторичной обмотки, что приводит к увеличению пускового момента. В рабочем же режиме вследствие малой частоты токи, индуктируемые в стальных кольцах, незначительны. Поэтому такие двигатели по своим свойствам приближаются к глубокопазным.
В асинхронных двигателях с короткозамкнутым ротором мощностью 100—150 кет и ниже обмотка ротора выполняется путем алюминиевой заливки. При этом с целью использования явления вытеснения тока и улучшения пусковых характеристик применяются вытянутые в радиальном направлении пазы той или иной
 Рис. 27-9. Колбовидная и трапецеидальная формы сечения стержней роторов
формы (рис. 27-10), которые заливаются алюминием по всему сечению. Одновременно отливаются также короткозамыкающие кольца с вентиляционными крылышками.
В связи с изложенным необходимо отметить, что во всех изготовляемых в СССР асинхронных двигателях с короткозамкнутым ротором мощностью от 500—600 вт и выше используется явление вытеснения тока, и поэтому, а также вследствие насыщения путей потоков рассеяния такие двигатели обладают переменными параметрами и для них круговая диаграмма токов действительна только в пределах нормальных рабочих режимов. В двигателях мощностью в несколько десятков ватт и ниже размеры пазов ротора получаются настолько малыми, что использование эффекта вытеснения тока в них обычно невозможно. Такие двигатели, кроме того, имеют малое насыщение участков магнитной цепи, вследствие чего они обладают постоянными параметрами и для них круговая диаграмма действительна в полной мере.
В СССР асинхронные двигатели изготовляются в виде унифицированных серий. Наиболее массовым является выпуск двигателей общепромышленного назначения с номинальными мощностями 0,6—100 кет. В течение ряда послевоенных лет на такие мощности в СССР выпускались двигатели с коротко-замкнутым ротором серии А и АО, а в настоящее время выпускаются двигатели модернизированной серии А2 и АО2 с улучшенными технико-экономическими показателями (А и А2 — защищенного исполнения, АО и АО2 — закрытого обдуваемого исполнения). Двигатели этой серии охватывают 9 габаритов, от 1-го до 9-го, с наружными диаметрами сердечников статора от 133 до 458 мм, с несколькими длинами в каждом габарите. Двигатели 1-го—5-го габаритов выпускаются только в закрытом исполнении. Роторы всех двигателей серии имеют алюминиевую заливку. Тип АО2-72-4, например, означает: трехфазный короткозамкнутый двигатель серии АО2 (закрытое; обдуваемое исполнение), 7-го габарита и 2-й длины, с 4 полюсами. В качестве примера в табл. 27-1 приводятся номинальные и некоторые другие данные ряда асинхронных двигателей.
На базе нормальных двигателей серии А2 и АО2, с использованием их основных деталей и узлов, предусматривается также специальное исполнение двигателей: 1) с повышенным пусковым моментом, 2) с повышенным скольжением, 3) для текстильной промышленности, 4) многоскоростных, 5) с фазным ротором, а также ряд других специальных исполнений (малошумные на подшипниках скольжения, со встроенным электромагнитным
Рис 27-10 Формы пазов роторов двигателей с заливкой алюминием
тормозом для быстрой остановки, рудничные, для тропического климата и др.).
Таблица 27-1 Данные асинхронных двигателей
Повышенный пусковой момент достигается специальной формой пазов ротора, а повышенное номинальное скольжение — заливкой ротора, силумином (сплав алюминия и кремния), который имеет более высокое по сравнению с алюминием удельное сопротивление. Двигатели с повышенным скольжением обладают в определенных случаях лучшими средневзвешенными энергетическими показателями при пульсирующей нагрузке. Двигатели большинства текстильных машин имеют большой коэффициент использования, т. е. они находятся в работе в течение большей части суток и несут при этом номинальную или близкую к ней нагрузку. В этих условиях экономически выгодно повышение к. п. д. двигателей, что достигается выполнением двигателя в данных габаритах на меньшую мощность. На металлообрабатывающих станках (токарных, фрезерных и др.) для облегчения и удешевления коробки скоростей в большинстве случаев устанавливаются короткозамкнутые асинхронные двигатели, обмотка статора которых допускает переключение на разные числа полюсов, в результате чего двигатель имеет несколько номинальных скоростей вращения (см. § 28-2).

|
|
С
|
ко р отк
|
о з а м
|
кнут
|
ы м р
|
эт ор (
|
)М
|
|
|
|
АО2-11-4
|
0,6
|
220/380
|
1360
|
0,72
|
0,76
|
7,0
|
1,8
|
2,2
|
15
|
|
АО2-Н-6
|
0,4
|
220/380
|
915
|
0,68
|
0,65
|
6,5
|
1,8
|
2,2
|
15
|
|
АО2-41-4
|
4,0
|
220/380
|
1440
|
0,86
|
0,85
|
7,0
|
1,5
|
2,0
|
55
|
|
АО2-41-6
|
3,0
|
220/380
|
955
|
0,83
|
0,78
|
6,5
|
1,3
|
1,8
|
55
|
|
АО2-71-4
|
22
|
220/380
|
1450
|
0,90
|
0,90
|
7,0
|
1,2
|
2,0
|
208
|
|
АО2-71-8
|
13
|
220/380
|
725
|
0,89
|
0,84
|
7,0
|
1,1
|
1,7
|
200
|
|
АО2-92-4
|
100
|
220/380
|
1480
|
0,93
|
0,92
|
7,0
|
1,1
|
2,0
|
640
|
|
АО2-92-8
|
55
|
220/380
|
735
|
0,92
|
0,90
|
7,0
|
1,1
|
1,7
|
625
|
|
А114-2М
|
400
|
6000
|
2970
|
0,930
|
0,92
|
7,0
|
1,4
|
2,6
|
2080
|
|
А114-10М
|
160
|
3000
|
590
|
0,919
|
0,825
|
5,6
|
1,75
|
2,4
|
1850
|
|
АН15т51-6
|
2000
|
6000
|
990
|
0,954
|
0,88
|
6,5
|
1.1
|
2,4
|
8900
|
|
|
|
С ф
|
азным ротором
|
|
|
|
|
АК51-4
|
2,8
|
220/380
|
1370
|
0,780
|
0,82
|
__
|
__
|
2,2
|
81,5
|
|
АК71-8
|
10,0
|
220/380
|
700
|
0,815
|
0,76
|
.—
|
__
|
1,9
|
230
|
|
АК-92-4
|
100
|
220/380
|
1460
|
0,905
|
0,88
|
—
|
—
|
2,8
|
715
|
|
АКП4-4М
|
320
|
6000
|
1480
|
0,959
|
0,90
|
—
|
—_
|
2,8
|
2100
|
|
АКН-15-51-6
|
2000
|
6000
|
990
|
0,924
|
0,89
|
—
|
—
|
2,7
|
9600
|
Кроме двигателей серии А2 и АО2, в СССР изготовляются также асинхронные двигатели других серий, в том числе на мощности ниже 0,6 кет и выше 100 кет. Выпускаются также двигатели ряда специальных серий (взрывобезопасные, крановые и др.).
Содержание
Предыдущий § Следующий
| 