|
Содержание
Предыдущий § Следующий
Глава двадцать девятая ОСОБЫЕ ВИДЫ И РЕЖИМЫ РАБОТЫ МНОГОФАЗНЫХ АСИНХРОННЫХ МАШИН
§ 29-1. Асинхронные машины с неподвижным ротором
Фазорегулятор (рис. 29-11 а) представляет собой асинхронную машину с фазным ротором, ротор которой заторможен и может быть вручную или с помощью вспомогательного (исполнительного) двигателя повернут относительно статора на 360° эл. Торможение и поворот ротора осуществляется обычно с помощью самотормозящейся червячной передачи. Первичная сторона фазорегулятора присоединяется к сети, а вторичная — к нагрузке (сопротивления ZHT на рис. 29-1, а).
Обозначим р электрический угол поворота оси фазы обмотки ротора относительно оси фазы обмотки статора (рис. 29-1, а). Если принять для простоты, что у рассматриваемой асинхронной машины гх = г2 = хл = хт = 0, то Ux — Ег и £/2 = Е2 и диаграмма напряжений фазорегулятора имеет вид,, показанный на рис. 29-1, б. Э. д. с. Ei и £2 индуктируются общим вращающимся полем и сдвинуты в соответствующих фазах статора и ротора относительно друг друга на угол р\ При повороте ротора и изменении угла (J вектор Ёг — 0% поворачивается относительно векторов Ё\ и Ох-
Фазорегулятор представляет собой в сущности поворотный трансформатор
с регулируемой фазой вторичного напряжения относительно первичного. Фазорегуляторы находят применение главным образом в лабораториях, в частности, при испытании счетчиков электрической энергии и других приборов и аппаратов.
Необходимо иметь в виду, что на ротор фазорегулятора, когда од нагружен, действует вращающий момент. Это же относится и к другим рассматриваемым ниже машинам с заторможенным ротором.
Трехфазный индукционный регулятор служит для регулирования напряжения трехфазной сети переменного тока. Обмотки регуля-
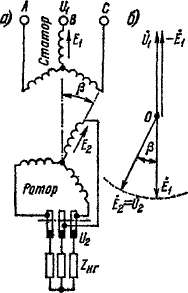 Рис. 29-1. Схема (а) и векторная диаграмма напряжений (б) фазорегулятора
тора включаются по схеме автотрансформатора, и регулятор представляет собой в сущности поворотный автотрансформатор.
Схема соединений обмоток наиболее широко применяемого трехфазного индукционного регулятора представлена на рис. 29-2, а. Одна из обмоток (wt) является первичной и включается параллельно в сеть первичного напряжения Ult а вторичная обмотка (ш2) включается в эту сеть последовательно. В качестве первичной обмотки обычно используют обмотку ротора, так как при этом необходимо вывести с помощью контактных колец и щеток или гибких
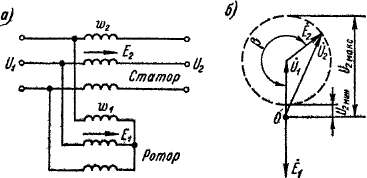 Рис. 2&-2. Схема соединений обмоток (а) и векторная
диаграмма напряжений (б) трехфазного индукционного
регулятора
проводников только три конца обмотки. Первичная обмотка может быть включена как в звезду, так и в треугольник. Ниже для ясности будем иметь в виду соединение в звезду.
Первичная обмотка потребляет из первичной сети намагничивающий ток, который создает вращающийся поток Ф. Если пренебречь падениями напряжения, то этот поток индуктирует в обмотках э. д. с. Ех — £4 и
Э. д. с. Еъ складывается с напряжением Ut под углом р (рис. 29-2, б), равным электрическому углу поворота фазы вторичной обмотки относительно первичной. При изменении р* концы векторов Ё% и Ог ири &х = const скользят по окружности. Предельные значения вторичного напряжения при пренебрежении падениями напряжения будут: при {5 = 180°
При равенстве чисел витков обмоток статора и ротора
У регулятора (рис. 29-2) одновременно с изменением величины напряжения U2 меняется также его фаза, что иногда нежелательно. В таких случаях можно применить сдвоенный индукционный регулятор (рис. 29-3), у которого первичные обмотки присоединены к первичной сети параллельно, а вторичные — последовательно
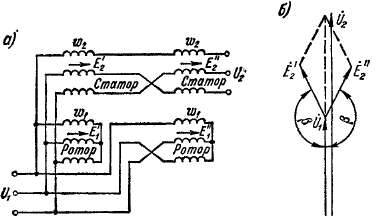 Рис 29-3 Схема соединений обмоток (а) и векторная диаграмма напряжений (б) сдвоенного трехфазного индукционного регулятора
друг с другом. Оба регулятора укреплены на общем валу, и у второго регулятора на первичной и вторичной сторонах присоединения к двум фазам переменены местами. Вследствие этого магнитные поля двух регуляторов вращаются в противоположные стороны, и при повороте ротора одного регулятора по направлению вращения поля ротор другого поворачивается против направления вращения поля. Векторы вторичных э. д. с. регуляторов Е'% и Ё'% на векторной диаграмме (рис. 29-3, 6) поворачиваются поэтому в противоположных направлениях, и при неучете падения напряжения фаза вторичного напряжения
остается неизменной. Вращающий момент на валу сдвоенного регулятора равен нулю. Недостатком сдвоенного регулятора является наличие двух машин, что приводит к удорожанию установки. Не изменяющееся по фазе вторичное напряжение можно получить также в индукционном регуляторе с соединением фаз обмоток
 
статора (с) и ротора (р) в общий треугольник (рис. 29-4), если числа витков статора и ротора одинаковы. Первичное напряжение Ux = = const в таком регуляторе подводится к вершинам треугольника ABC, а вторичное U% = var отводится от средних точек а, Ь, с сторон этого треугольника (рис. 29-4).
Векторные диаграммы напряжений регулятора, изображенного на рис. 29-4, можно построить, учитывая, что э. д. с. фаз статора Ес и ротора £р одного и того же плеча треугольника при аУс^об. с = йУр&об. р равны по величине, сдвинуты по фазе на угол р поворота ротора относительно статора и в сумме равны приложенному фазному напряжению:
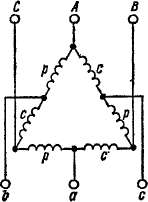 На рис. 29-5, а, б я в показаны вектор- l^0\^ZZl ные диаграммы регулятора, выполненного по го регулятора с соеди-схеме рис. 29-4, соответственно для случаев нением обмоток стато-Р = 0, р>0 и р<0. Треугольники ABC pa и ротора в общий представляют собой при этом систему неиз- треугольник менных первичных напряжений, векторы СЬ, Ас, Ва — э. д. с. фаз статора Ес и векторы ЬА, сВ, аС — э. д. с. фаз ротора Ер. При повороте ротора сдвиг фаз (J между э. д. с. Ес и Ер изменяется и одновременно изменяются также величины вра-
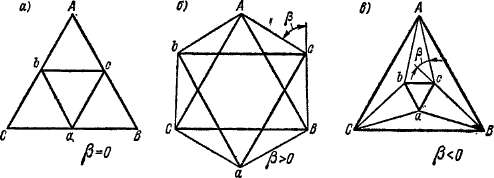 Рис. 29-5. Векторная диаграмма э. д. с. и напряжений индукционного регулятора, выполненного по схеме рис. 29-4, при разных положениях
ротора
вдающегося потока Ф и э. д. с. Ес, Ер, так что сумма э. д. с. фаз одного и того же плеча треугольника остается неизменной:
 
Как видно из рис. 29-5, треугольник вторичных напряжений abc при этом меняется по величине, но при дос/гоб. с = щКб. Р или £с = Ер положение этого треугольника и, следовательно, фаза вторичного напряжения не изменяются.
Отметим, что при отсутствии нагрузки на вторичной стороне регулятор, изображенный на рис. 29-4, по своим свойствам представляет собой регулируемую трехфазную реактивную катушку.
В индукционных регуляторах, как й в автотрансформаторах, нужно различать внешнюю, или проходную, и внутреннюю, или габаритную, мощности (см. § 18-2). Соотношения между этими мощностями в индукционных регуляторах и автотрансформаторах яри одинаковых схемах соединений обмоток и одинаковых соотношениях чисел витков одинаковы (для схемы рис. 29-2, а при § = — 180° и для схемы рис. 29-4 при р* = 0).
§ 29-2. Асинхронный генератор с самовозбуждением
Генераторный режим работы асинхронной машины рассматривался в § 24-5. При этом было выяснено, что асинхронный генератор потребляет реактивный намагничивающий ток для создания магнитного потока й поэтому должен работать параллельно с сетью переменного тока, к которой присоединены другие машины или установки (например, синхронные генераторы), способные снабжать
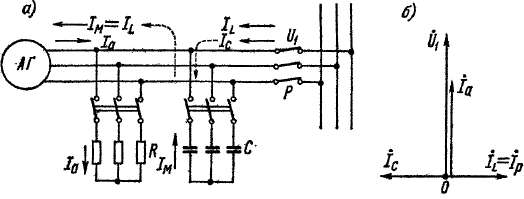 Рис. 29-6. Схема асинхронного генератора АГ с местной нагрузкой R и конденсаторной батареей С {а) и векторная диаграмма (б)
реактивным током асинхронные генераторы идругих потребителей. Наряду с этим асинхронный генератор может работать также л режиме самовозбуждения на отдельную сеть, получая реактивный ток возбуждения от конденсаторов, прнключаемых к зажимам асинхронного генератора.
'Для выяснения некоторых положений рассмотрим схему рис. 29-6, на которой изображен асинхронный генератор АГ, работающий параллельно с сетью и потребляющий из нее реактивный (индуктивный) ток lL = / . Этот ток создает в генераторе магнитное поле, в то время как активный ток 1а, вырабатываемый генератором АГ, полностью потребляется местным Потребителем R. Приключим теперь к зажимам, генератора конденсаторы С такой емкости, чтобы потребляемый
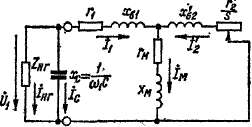 Рис 29-7. Схема замещения самоВоз-буждающегося асинхронного генератора с нагрузкой Zat и емкостным сопротивлением конденсаторной батареи хс
ими из сети емкостный ток /с по величине был равен току IL, Очевидно, что при этом потребляемый из сети ток
Рубильник Р можно поэтому отключить, и асинхронный генератор АГ будет работать на изолированную местную сеть с приемниками RnC. Так как при этом, с одной стороны, генератор продолжает потреблять ток IL = 1ш, а с другой стороны, конденсаторы продолжают потреблять ток /с = lh, то можно сделать следующие выводы:
1) источниками реактивного намагничивающего тока /м = /j. для генератора теперь являются конденсаторы;
2) утверждения «конденсатор потребляет из сети (или от асинхронного генератора) емкостный ток» и «конденсатор отдает в сеть (яля асинхронному генератору) индуктнвйый ток» равноценны; 3) равноценны также утверждения «асинхронная машина потребляет из сети индуктивный ток» и «асинхронная машина отдает в сеть емкостный ток».
В практике энергетических систем термины «реактивный ток» и «реактивная мощность» принято связывать с отстающим (индуктивным) током. При этом говорят, что конденсаторы отдают в сеть реактивный ток и, реактивную мощность и являются гейераторами реактивной мощности.
Из «казааиого следует, что при чисто активной нагрузке асинхронного генератора мощность конденсаторов должна равняться реактивной (намагничивающей) мощности генератора. Если же нагрузка будет иметь смешанный активно-индуктивный характер, то мощность конденсаторной батареи необходимо соответственно увеличить, чтобы она покрывала также реактивную мощность нагрузки. При смешай-ной активно-емкостной нагрузке требуется конденсаторная батарея меньшей мощности, а при определенных условиях эта батарея становится излишней.
Схема замещениа-асинхронного генератора с самовозбуждением при помощи конденсаторов и с нагрузкой ZST изображена на рис. 29-7. На основании этой схемы могут быть найдеды все соотношения и величины, характеризующие режим работы генератора. В частности, на основе баланса реактивных мощностей с учетом потерь реактивной мощности в сопротивлениях хЛ, x'oi и хы мождо определить необходимую мощность « необходимую емкость конденсаторов. Векторная диаграмма самого асинхронного генератора с самовозбуждением имеет обычный вид и не зависит от того, откуда генератор потребляет необходимую реактивную мощность.
Рис. 29-8. К выяснению условий самовозбуждения асинхронного генератора
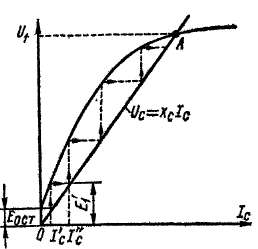
Выяснив в общих чертах работу асинхронного генератора с самовозбуждением в установившемся режиме, рассмотрим процесс его самовозбуждения на холостом ходу (рис. 29-8), пренебрегая активными сопротивлениями.
Ввиду наличия потока остаточного намагничивания ротора асинхронной машины, при вращении ротора в обмотке статора индуктируется некоторая э д. с. £ост (рис. 29-8). Эта э. д. с. вызывает в конденсаторах ток 1'с, который, протекая по обмотке статора машины, усиливает его магнитный поток. В результате индуктируемая э. д. с. и ток конденсатора увеличиваются и т. д.
На рис. 29-8 зависимость индуктируемой в обмотке статора генератора э. д.с. £i от намагничивающего тока в этой обмотке /м или от тока конденсатора /с = /м изображена в виде кривой холостого хода или кривой намагничивания (жО1 + + хм)1с- Прямая U =• хс1с определяет зависимость напряжения конденсатора от его тока. Процесс самовозбуждения на рис. 29-8 условно изображен ступенчатой линией. Э. д. с. остаточного намагничивания вызывает в конденсаторе ток
Очевидно, что процесс самовозбуждения асинхронного генератора во многом аналогичен процессу самовозбуждения генератора постоянного тока (см. § 9-4).
Выше предполагалось, что первоначальный толчок тока статора при самовозбуждении возникает в результате действия потока остаточного намагничивания. Вместе с тем роль первоначального толчка может сыграть также ток разряда предварительно заряженной конденсаторной батареи, наводка тока внешним магнитным полем и флуктуация электронов в цепи обмотки статора. Последние две причины на практике часто оказываются недостаточно сильными для развития самовозбуждения.
Мощность конденсаторной батареи самовозбуждающегося асинхронного генератора достаточно велика (до 70—100% от номинальной мощности генератора), что делает установку дорогой. В связи с этим такие генераторы находят в настоящее время весьма ограниченное применение. Иногда явление самовозбуждения асинхронной машины с подключенными к ней конденсаторами используется для торможения асинхронных двигателей после отключения их от сети. Торможение при этом происходит за счет потерь, возникающих в самовозбужден-ной машине и приключенных к ней сопротивлениях.
Самовозбуждение асинхронной машины возможно также при включении конденсаторов во вторичную цепь, однако этот случай ввиду малой частоты в цепи ротора малоэкономичен.
§ 29-3. Асинхронные машины с массивным ротором
Ротор асинхронной машины можно изготовить из массивной стальной поковки и без пазов. В этом случае роль обмотки ротора играет сам массивный ротор, в котором вращающееся магнитное поле будет индуктировать токи.
Массивный ротор имеет большое преимущество в прочности. В связи с этим асинхронные двигатели на высокие скорости вращения (10 000—100 000 об/мин)
 строятся с массивным ротором. Такие двигатели применяются в различных установках специального характера, в частности в гироскопических навигационных устройствах, и питаются током повышенной частоты (400—1000 гц).
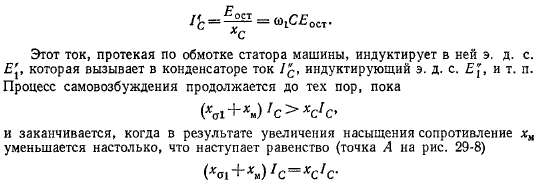
Активное г2 и индуктивное хл сопротивления массивного ротора ввиду сильно выраженного поверхностного эффекта значительно зависят от скольжения. Так, в случае / = 50 гц при пуске (s = 1) эквивалентная глубина проникновения токов в роторе составляет только около Змм, приs= 0,02 — около 20мм, npns = = 0,001 — около 100 мм. Поэтому при пуске сопротивление г2 весьма велико и хл мало, а с уменьшением скольжения сопротивление г2 уменьшается и ха2 увеличивается. Вследствие подобного изменения параметров геометрическое место токов машины с массивным ротором имеет вид, изображенный на рис. 29-9 сплошной линией. Для сравнения там же
штриховой линией показана круго- fy^$=/
вая диаграмма асинхронного двигателя с постоянными- параметрами.
В результате сильного проявления поверхностного эффекта пусковой момент двигателя с массивным ротором достаточно велик (Ма/Мя = 1,5-V- 2,0). Однако двигатели малой и средней мощности с массивными роторами при /= 50гц имеют низкие к. п. д. и коэффициент мощности, так как при Рис. 29-9. Геометрическое место токов скольжении s = 0,02 -з- 0,05 глу- асинхронной машины с массивным ро-бина проникновения тока и потокатором
в сталь ротора мала, активное и
магнитное сопротивления ротора магнитному потоку велики, вследствие чего двигатель имеет большое номинальное скольжение и большой намагничивающий ток. С увеличением геометрических размеров машины, а также при увеличении номинальной скорости вращения рабочие характеристики двигателя улучшаются. Так, асинхронный двигатель с массивным ротором на / = 50 гц и Ря = = 20 000 -з- 50 000 кет имел бы номинальное скольжение значительно менее 1%. В двигателях относительно небольшой мощности на высокие скорости вращения для улучшения рабочих характеристик иногда внешнюю поверхность массивного стального ротора покрывают медью. С этой же целью применяются медные кольца, прикрепленные к торцевым поверхностям массивного ротора. Роль этих колец аналогична торцовым короткозамыкающим кольцам беличьей клетки, и активное сопротивление ротора с такими кольцами уменьшается. Иногда на цилиндрической поверхности ротора выполняют также пазы, но без укладки в них обмотки. При этом площадь внешней рабочей поверхности ^ротора, нагруженной токами, увеличивается, что приводит к уменьшению активного сопротивления ротора.
§ 29-4. Линейные и дуговые асинхронные машины
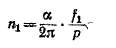
Если представить себе, что обычный круглый статор асинхронного двигателя разрезан по осевой плоскости и выпрямлен в плоскость или разогнут по дуге большего радиуса, чем радиус исходного круглого статора, то получится статор линейной (рис. 29-10, о) или дуговой (рис. 29-10, б) асинхронной машины. Трехфазная обмотка такого статора создает в воздушном зазоре в пределах сердечника статора соответственно бегущее или вращающееся магнитное поле.
Движущаяся часть линейной машины называется бегуном, а движущаяся часть дуговой машины — ротором. Бегун и ротор могут иметь конструкцию, свойственную роторам нормальных короткозамкнутых асинхронных машин, т. е. иметь сердечники из листовой электротехнической стали и обмотку
Рис. 29-9. Геометрическое место токов асинхронной машины с массивным ротором
типа беличьей клетки, расположенную в пазах сердечника бегуна и ротора. Они могут быть изготовлены также массивными — из стали или чугуна, и в этом случае роль вторичной обмотки выполняет само тело бегуна или ротора.' Линейную асинхронную машину можно выполнить также в виде двух статоров, обращенных друг к другу, и бегуном при этом служит проводящее тело, расположенное в зазоре между сердечниками статоров. Проводящее вторичное тело в виде шины может быть также неподвижным, а „статор" — находиться на движущемся экипаже. Такие устройства перспективны для высокоскоростного пассажирского транспорта.
Принцип действия рассматриваемых машин одинаков с принципом действия нормальных асинхронных машин: бегущее или вращающееся поле статора индуктирует в обмотке бегуна или ротора токи, в результате взаимодействия которых с магнитным полем возникают электромагнитные силы, действующие на бегун и ротор. В установившемся режиме скольжение бегуна или ротора относительно магнитного поля обычно невелико.
Особенностью дуговой машины является то, что ее скорость вращения не связана так жестко с числом пар полюсов р и частотой fi, как в нормальной асинхронной машине. Действительно, пусть статор .машины (рис. 29-10, 6) имеет р пар полюсов' и занимает дугу с центральным углом а,-За один период тока вращающееся поле перемещается на 2т или на угол ajp, а в тече» ние одной секунды поле совершает
оборотов. Выбирая различные а, полу чаем различные скорости вращения. Щщ а = 2я имеем нормальную асинхронную машину с
«i=/i/P. об/сек.
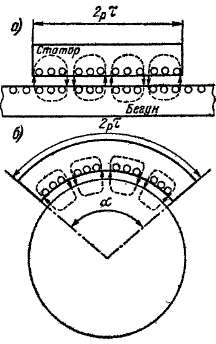 P#c. 29-10, Линейная (а) я дуговая (б) асинхронные машины
Линейные асинхронные машины можно использовать для получения возвратно-поступательного движения. При этом производится периодическое пере* ключеиие обмотки статора (изменение чередования фаз) и. машина работает в циклическом режиме ускорения, движения и торможения. Такой режим в энергети; ческом отношении невыгоден, так как в течение каждого цикла работы при уско^ рении и торможении бегуна бесполезно теряется относительно большое количество-энергии в виде тепла, выделяемого в обмотках. Количество теряемой энергии тем больше, чем больше масса бегуна и его максимальная скорость. В связи с этим Явигатели возвратно-поступатального движения не получили заметного распространения. Применение линейных и дуговых асинхронных машин и родственных им магнитогидродинамическ'их машин (см, §29-5) в качестве электрических машин специального назначения расширяется.
В линейных и дуговых асинхронных машинах возникают краевые эффекты, вызванные 'уем. что их статоры не" замкнуты в кольцо и имеют конечную длину. Вследствие этого энергетические показатели линейных и дуговых машин хуже» чем у нормальных асинхронных машин.
§ 29-5. Магнитогидродинамические машины переменного тока
Одной из разновидностей магнитогидродинамических машин переменного тока являются индукционные насосы для жидких металлов, которые подразделяются на линейные и винтовые [58].
Линейные индукционные насосы родственны линейным асинхронным машинам (см. § 29-4) и делятся на плоские и цилиндрические.
Плоские насосы (рис. 29-11) имеют обычно два индуктора, каждый из которых состоит из сердечник-а 1 и многофазной (обычно трехфазной) обмотки 2. Между индукторами находится плоский канал прямоугольного сеченияЗ с жидким металлом. Стенки канала в зависимости от свойств жидкого металла могут быть как металлическими, так и керамическими. Между стенками канала и индукторами в большинстве случаев имеется слой тепловой изоляции. Бегущее магнитное
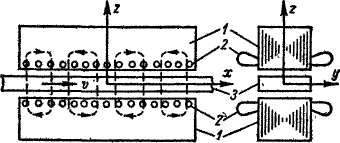 Рис. 29-Я. Устройство плоского линейного индукционного насоса для жидких металлов
поле индукторов наводит в жидком металле токи, и вследствие взаимодействия этих токов с магнитным полем возникают электромагнитные силы, действующие на частицы жидкого металла. В результате развивается напор, и жидкий металл прихоцвт в движение по направлению движения поля с некоторым скольжением относительно его.
Цилиндрические насосы имеют канал кольцевого сечения, внутри которого расположен сердечник без обмотки, а снаружи — с обмоткой. Обмотка создает магнитное поле, бегущее вдоль оси канала.
Представление о винтов ом индукционном насосе можно получить, если предположить, что ротор асинхронного двигателя заторможен, зубцы ротора вместе с обмоткой срезаны и в зазоре, образовавшемся между внешним и внутренним сердечниками, навит винтовой канал.
Индукционные насосы находят применение в исследовательских, транспортных и промышленных установках с ядерными реакторами на быстрых нейтронах, в которых для отвода тевда используются жидкометаллические теплоносители (натрий, кадий, их сплавы и др.). Создаются также разные установки для металлургии и Литейного производства. Все виды индукционных насосов обратимы, и насосы могут работать в режиме асинхронного генератора, если по их каналам за счет внешнего источника прокачивать жидкий металл со скоростью выше скорости движения поля. Магнитогидродинамические генераторы с жидкими металлами, а также с парами жидких металлов имеют перспективы практического применения в разных энергетических установках, в том числе с ядерными реакторами [58]. Предложены различные конструктивные разновидности подобных генераторов. Однако на пути их создания имеются различные трудности, из которых можно отметить проблему разгона жидких металлов за счет содержащейся в них тепловой энергии.
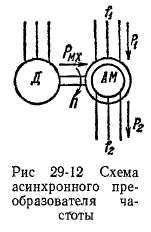
§ 29-6. Асинхронный преобразователь частоты
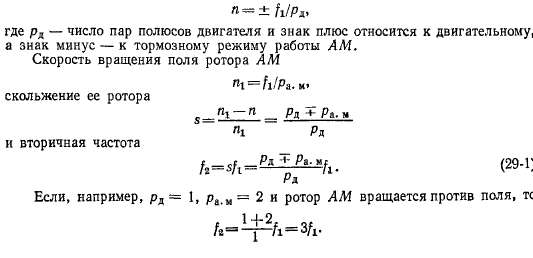
Асинхронный преобразователь частоты (рис. 29-12) состоит из трехфазной асинхронной машины AM с фазным ротором и соединенного с ней приводного двигателя Д. Одна из обмоток асинхронной машины, например обмотка статора, приключается к первичной сети с частотой flt а вторичная обмотка питает вторичную сеть током частоты скольжения f2 = sfj.
Асинхронная машина AM работает либо в тормозном, режиме противовклю-чения, когда s > 1 и f2 > fi. либо в режиме двигателя, когда s < 1 и f2 > fv В двигательном режиме ротор AM вращается в направлении вращения поля, а в тормозном — против направления вращения поля. Генераторный режим работы AM в преобразователях частоты обычно не используется.
рели пренебречь потерями, то первичная мощность AM
Pi = Pbh>
а вторичная мощность, или мощность скольжения,
Механическая мощность, развиваемая двигателем Д, Pux = P2-Pi = (s-\)P1.
При s > 1, когда fi>f\, приводной двигатель Д работает в режиме двигателя и Рт > 0. При s > 1 двигатель Д работает в действительности в режиме генератора и Рмх < 0.
Приводным двигателем Д обычно служит асинхронный или синхронный двигатель. Если величину вторичной частоты необходимо регулировать, то возбуждение первичной обмотки AM частотой производится от вспомогательной синхронной или коллекторной машины с регулируемой частотой. Для этой же цели в качестве двигателя Д можно, использовать машину постоянного тока и регулировать скорость ее вращения. Если /а > fu то Р2 > Pi, и для облегчения работы контактных колец и щеток в качестве первичной обмотки с током частоты ^ используется обмотка ротора. В простейшем случае, когда регулирования величины частоты f2 не требуется, приводной синхронный или асинхронный двигатель Д и первичную обмотку AM можно питать от общей сети с промышленной частотой Д. При этом скорость вращения приводного двигателя и всего агрегата, если в случае использования асинхронного приводного двигателя, пренебречь его скольжением, равна
§ 29-7. Работа трехфазных асинхронных двигателей при неноминальных условиях
Изменение частоты. Частота сети ft может отличаться от номинальной fH, в особенности, в маломощных автономных энергетических установках (транспорт, лесоразработки, изолированные строительные объекты и пр.). Рассмотрим влияние изменения частоты на работу двигателя, когда иг = £/1н = const и момент нагрузки на валу Мст равен или близок номинальному.
Если пренебречь падениями напряжения, то
откуда следует, что при иг — const изменение fx приводит к изменению потока двигателя Ф. С другой стороны,
М = &Ф/2 cos t|j2,
откуда следует, что при Мст = const изменение Ф приводит к изменению вторичного тока /2 и нагрузочной составляющей первичного тока.
Ввиду заметного насыщения магнитной цепи асинхронных двигателей уменьшение /х и соответствующее ему увеличение Ф приводят к значительному увеличению намагничивающего тока /м. Например, уменьшение d на 10% обычно вызывает увеличение /„ на 20—30%. Хотя при увеличении Ф и МС1 — const ток /2 соответственно уменьшается, более значительное увеличение намагничивающего тока может вызвать общее увеличение первичного тока и перегрев первичной обмотки.
Увеличение fx и соответствующее ему уменьшение Ф приводят к заметному уменьшению намагничивающего тока. При этом, однако, при М„ = const растет ток /2, что приводит к перегрузке током обмотки ротора, а при определенных условиях также и к перегрузке обмотки статора.
Таким образом, как уменьшение, так и увеличение частоты вызывают ухудшение условий работы асинхронных двигателей, работающих при нагрузках, близких к номинальным. Поэтому колебания частоты сети должны быть ограничены. По ГОСТ 183—66 двигатели должны отдавать номинальную мощность при отклонениях частоты от номинального значения до ±5%.
Изменение напряжения при fx = /lH приводит, согласно равенству (29-2), к тем же последствиям, как и изменение частоты, с той лишь разницей, что уменьшение Ux вызывает также уменьшение Ф и наоборот. Поэтому изменение иг при /х = const и при нагрузках, близких к номинальным, тоже приводит к ухудшению условий работы асинхронных двигателей. В связи с этим колебания Ux
также должны быть ограничены. На основании ГОСТ 183—66 двигатели должны отдавать номинальную мощность при отклонениях напряжения сети от номинального в пределах от —5 до +10%. При одновременном отклонении напряжения и частоты двигатели переменного тока, согласно ГОСТ 183—66, должны отдавать номинальную мощность, если сумма процентных значений этих отклонений без учета знаков не превосходит 10%.
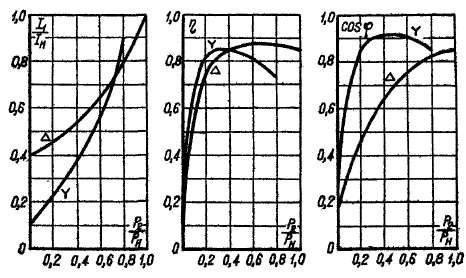
Переключение обмоток слабо загруженных асинхронных двигателей с треугольника на звезду. Как было установлено, при боль-
Рис. 29-13. "Рабочие характеристики асинхронного двигателя
28 mm, 975 об/мин при соединениях обмотки статора в трегулышк"
и звезду и при напряжении сети, равном номинальному фазному
напряжению двигателя
шой нагрузке асинхронного двигателя уменьшение напряжения не его зажимах приводит к перегрузке обмоток двигателя токами <я всеми вытекающими отсюда ^Последствиями (увеличение потери! уменьшение к. п. д., перегрев обмоток). Однако если двигателЩ нагружен слабо, например до 35—40% от номинальной мощности! то уменьшение иг может привести к улучшению энергетическиэ| показателей двигателя. Действительно, намагничивающий ток /^ в результате уменьшения потока при этом весьма значительна уменьшается и, следовательно, коэффициент мощности заметно уве* личивается. Уменьшаются пропорционально U\ также магнитные потери. Хотя при Мст = const уменьшение £/а будет вызывать соответствующее увеличение /£, вследствие недогрузки двигателя величина /а может не превышать номинального значения. Нагрузоч* ная составляющая 1г увеличивается тай, же, как /£, но ввиду умени шения /„ результирующая величина 1г может даже уменьшиться?
В результате указанных причин величина к. п. д. ц может увеличиться.
По ряду причин некоторые асинхронные двигатели в условиях эксплуатации могут быть сильно недогруженными. Если обмотки статора таких двигателей нормально соединены в треугольник, то для улучшения c6s ф и к. п. д. двигателей может оказаться целесообразным переключение их в звезду. Напряжения фаз при этом уменьшатся в |/"3 раза, что вызовет также уменьшение Ф в У"3 раза, уменьшение /м в 2—2,5 раза и при условий Mcr = const = увеличение /а в V"3 раза. Если при этом к. п. д. улучшится или даже останется неизменным, то для улучшения cos ф сети целесообразно переключить обмотки статора в звезду. Величина нагрузки, ниже которой такое переключение дли данного двигателя целесообразно, должна быть установлена путем расчета или экспериментально.
На рйс. 29-13 в качестве иллюстрации к сказанному приведены характеристики двигателя на 28 кет, 975 обТмин. Из этих характеристик видное что для улучшения cos ф переключение обмоток этого двигателя в звезду целесообразно при нагрузках ниже 40% от номинального значения, когда cos ф и г) будут выше, чем при соединении в треугольник.
§ 29-8. Несимметричные режимы работы асинхронных двигателей
Предварительные замечания. Несимметричные режимы работы асинхронных Двигателей возникают в следующих случаях: 1) при искажении симметрии напряжений сети, 2) при несимметрии сопротивлений в цепях статора и ротора, 3) при несимметричной схеме соединений обмоток двигателя. Такие режимы могут возникнуть как результат отклонения условий работы двигателя от нормальных, в частности, вследствие неисправностей и аварий. В ряде случаев несимметричные режимы используются для получения характеристик с особыми свойствами. Рассмотрим некоторые несимметричные режимы и будем полагать, что устройство асинхронной машины в целом и фаз ее обмоток является симметричным.
Несимметричные режимы работы асинхронных машин целесообразно исследовать с помощью метода симметричных составляющих, пренебрегая насыщением и пользуясь методом наложения. Составляющие нулевой последовательности в токах обмоток асинхронных двигателей обычно не возникают, так как нулевые точки этих обмоток, если обмотки соединены в звезду, обычно изолированы. Поэтому следует рассмотреть поведение асинхронных машин по отношению к составляющим напряжений и токов прямой и обратной последовательности.
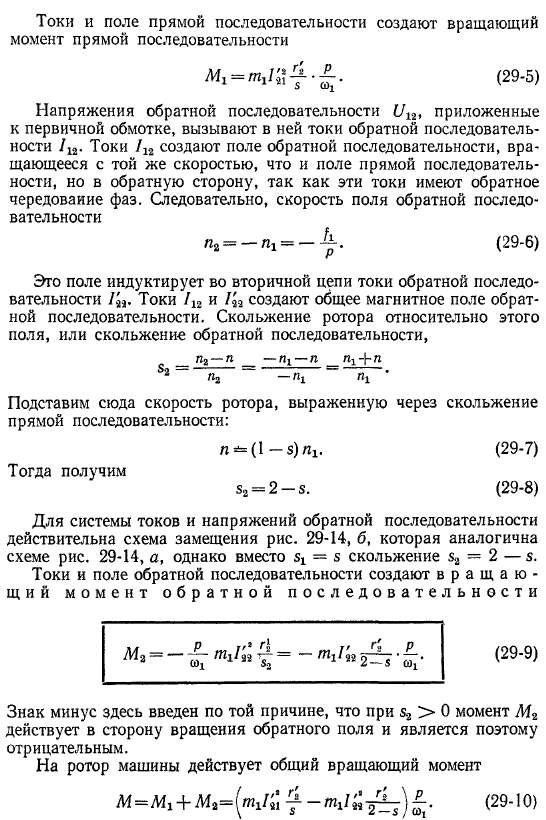
Работа асинхронной машины при несимметрии приложенных напряжений. Пусть система трехфазных напряжений, приложенных к первичной обмотке асинхронной машины, несимметрична и содержит составляющие прямой (Un) и обратной (£/12) последовательности. Все изложенное в предыдущих главах относилось к асинхронной машине с напряжениями и токами прямой последовательности. Повторим здесь вкратце полученные выше результаты, введя дополнительный индекс 1 для обозначения прямой последовательности, а затем распространим эти результаты на напряжения и токи обратной последовательности (с дополнительным индексом 2).
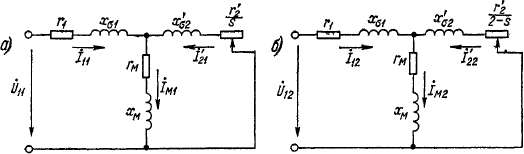 Рис. 29-14. Схемы замещения асинхронной машины для токов и напряжений прямой (а) и обратной (б) последовательности
Напряжения Un вызывают в первичной цепи машины токи прямой последовательности 1п. Эти токи создают магнитное поле и поток прямой последовательности, которые вращаются со скоростью
и индуктируют токи прямой последовательности /21 во вторичной обмотке. Токи 1и и /21 создают общее магнитное поле прямой последовательности, вращающееся со скоростью nv Скольжение ротора относительно этого поля есть скольжение прямой последовательности:
где п — скорость вращения ротора, положительная в случае, когда ротор вращается в сторону поля прямой последовательности.
Для системы токов и напряжений прямой последовательности действительна схема замещения рис. 29-14, а, которая идентична со схемами замещения рис. 24-6. Эта схема позволяет рассчитать токи 1п и /ji, если известны Uu и параметры машины.

Необходимо отметить, что, кроме моментов Мг и М%, в результате взаимодействия токов обратной последовательности ротора с прямым полем и взаимодействия токов прямой последовательности ротора с обратным полем возникают также добавочные составляющие вращающего момента. Однако эти добавочные моменты пульсируют с большой частотой, равной 2flt и средняя величина их равна нулю. Поэтому они практически не оказывают влияния на движение ротора-. Вместе с тем в результате взаимодействия прямых и обратных полей возникают вибрационные радиальные силы частоты 2/х.
Надо также отметить, что в общем случае параметры вторичной цепи r'i и х'а2 для токов прямой и обратной последовательности различны, так как частоты этих токов fn = sfi, fn = (2 —s)^ неодинаковы й влияние вытеснения тока сказывается поэтому в различной степени. Это обстоятельство необходимо учитывать при практических расчетах.
На рис. 29-15 изображены кривые моментов Мъ Ма и М для случая, когда
ип и и и постоянны по величине и U12/Uu = 0,5. Ввиду преобладания составляющей прямой последовательности режим работы машины а целом определяется действием этой составляющей. Как видно из рис. 29-15, под влиянием токов обратной последовательности результирующий момент двигателя М снижается, скольжение при том же моменте сопротивления на валу Мст увеличивается и, следовательно, увеличиваются потери и нагрев машины, а также уменьшается к. п. д. Все это является следствием тогоГ что по отношению к системе обратной последовательности мащина при 0 < s < 1 работает в тормозном режиме (1 < sa < 2). Из сказанного следует, что наличие токов обратной последовательности ухудшает условия работы асинхронных двигателей, й поэтому искажение симметрии системы питающих напряжений нежелательно. Однако в ряде случаев несимметричные режимы используются в специальных целях.
Несимметрия сопротивлений во вторичной цепи может возникать в результате различных неисправностей (например, отсутствие контакта в цепи одной фазы трехфазного ротора или обрыв одного или нескольких стержней короткозамкнутого алюминиевого ротора вследствие дефектов литья). Иногда для уменьшения числа контак-
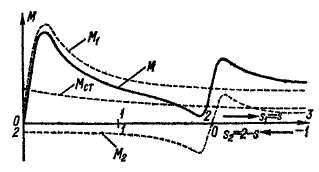 Рис 29-15 Моменты прямой (Mt) и обратной {М2) последовательности и результирующей момент (М) асинхронной машины в функции скольжения
тов реостата или контроллера при сохранении достаточно большого числа ступеней пуска применяются также несимметричные пусковые реостаты, в которых переключение ступеней реостата в разных фазах производится неодновременно. Например, если каждая фаза трехфазного пускового реостата имеет п — 2 ступени и переключение ступеней в каждой фазе производится одновременно, то получим 2+1=3 ступени пуска. Если же ступени каждой фазы переключить поочередно, то получим 2-3+1 = 7 ступеней пуска. В последнем случае большое количество ступеней пуска достигается при относительно простой и дешевой пусковой аппаратуре.
Рассмотрим, как влияет несимметрия цепи ротора на работу двигателя. Предположим при этом, что обмотка ротора является трехфазной.
Симметричная система напряжений сети Ux вызывает в обмотке статора токи 1г ~ 1п частоты сети fv Вращающееся поле прямой последовательности, созданное этими токами, индуктирует в фазах ротора э. Д. с Е% частоты /3 = sh- Вследствие неравенства сопротивлений отдельных фаз токи в фазах ротора будут неодинаковы, и их можно разложить на токи прямой (/21) и обратной (1п) последовательности.
Токи прямой последовательности ротора 1п частоты sfx создают прямое поле, вращающееся синхронно с полем токов 1Х = 1и статора, вследствие чего образуется результирующее, или общее, прямое поле двигателя. В результате взаимодействия этого поля с токами ротора /г1 создается вращающий момент прямой последовательности Mi, который имеет ту же природу, что и обычный момент двигателя при cHMMetpH4HOM режиме работы.
Токи обратной последовательности ротора /22 также имеют частоту /s =» sft и создают поле, вращающееся со скоростью
 которые замыкаются через сеть и накладываются на токи /ц частоты fv Так как в самой первичной сети нет напряжений и э. д. с. частоты /w и сопротивление сети по отношению к сопротивлению
обмоток двигателя мало, то можно считать, что обмотка статора по отношению к токам /13 замкнута накоротко.
Токи ротора /32 и статора /12 создают общее вращающееся поле, и при взаимодействии этого поля с током ротора /2а возникает действующий на ротор момент Мг. Общий действующий на ротор вращающий момент
При скольжениях 0,5<s< 1,согласно равенству (29-11), имеем л2 < 0, т. е. обратное поле вращается относительно статора в отри-
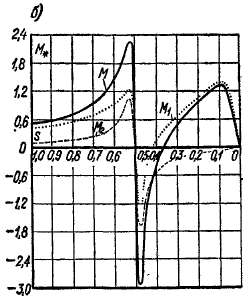
Рис. 29-16. Кривые вращающих моментов
асинхронного двигателя при несимметрии
сопротивлений в фазах (а) и при разрыве
цепи одной фазы (б) обмотки ротора
дательном направлении. Однако создаваемый при этом момент М2 действует в положительном направлении (М2 > 0), в результате чего и сам ротор вращается против направления вращения поля. Эти явления вполне аналогичны явлениям в асинхронном двигателе с питанием со стороны ротора, когда движение ротора также происходит против направления поля. При скольжениях 0 < s <
< 0,5 [см. выражение (29-11)] имеем п3 > 0, т. е. обратное поле вращается в положительном направлении, вследствие чего М2 <
< 0. При s = 0,5 [см. выражение (29-11)1 п% = 0, обратное поле неподвижно относительно статора, поэтому токи /12 в статоре не индуктируются и М2 = 0.
Характер кривой момента М2 = f (s) представлен на рис. 29-16, а. Там же показан характер кривой Мх = f (s) и М = Мх -f- M2 = = f (s). Кривая момента Мх имеет в области s = 0,5 провал в связи с тем, что при s = 0,5 ток /12 = 0, размагничивающее действие токов /1а по отношению к полю токов ротора /22 отсутствует (режим идеального холостого хода), поэтому индуктивное сопротивление
 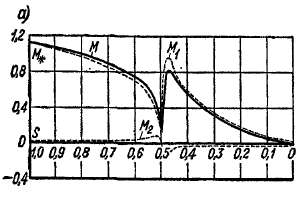 
токам /22 велико, вследствие чего величины всех токов /22, h\ и /х = /п при s « 0,5 уменьшаются.
В связи со сказанным выше кривая моментов М = f (s) двигателя также имеет в области s = 0,5 провал. При значительной несимметрии сопротивлений вторичной цепи величина этого провала может оказаться настолько большой, что двигатель при пуске «застрянет» на скорости п та 0,5 пх и не достигнет нормальной скорости вращения. Токи обмоток при этом будут велики и опасны для двигателя. Если одна из трех фаз ротора имеет обрыв, то величина М в области s — 0,5 будет даже отрицательной (рис. 29-16, б) и двигатель не достигнет нормальной -скорости вращения даже при пуске на холостом ходу. Такое явление впервые было описано Г. Гергесом в 1896 г. и называется эффектом Гергеса или эффектом одноосного включения. При увеличении активных сопротивлений цепи ротора, например, с помощью реостата кривая момента при обрыве одной фазы цепи ротора становится более благоприятной.
Содержание
Предыдущий § Следующий
| 