|
Содержание
Предыдущий § Следующий
|
Раздел четвертый
АСИНХРОННЫЕ МАШИНЫ
|
Основы теории. Вращающие моменты и механические характеристики. Круговая диаграмма. Двигатели с вытеснением тока в обмотке ротора. Пуск и регулирование скорости вращения. Особые виды и режимы работы многофазных машин. Однофазные машины. Микромашины автоматических устройств.
|
Глава двадцать четвертая ОСНОВЫ ТЕОРИИ АСИНХРОННЫХ МАШИН
§ 24-1. Асинхронная машина при неподвижном роторе
Общая характеристика режима работы. Ниже будем иметь в виду симметричную Многофазную асинхронную машину и симметричные режимы ее работы, когда сопротивления фаз каждой обмотки одинаковы, а напряжения и токи каждой обмотки- составляют симметричныесистемы прямой последовательности. Кроме того, предположим, что взаимная индукция между статором и ротором обусловливается только основной гармоникой магнитного поля в воздушном зазоре, а высшие гармоники этого подя относятся к рассеянию и учитываются в индуктивных сопротивлениях рассеяния. При этом можно представить себе, что в воздушном зазоре действуют только основные гармоники поля обеих обмоток. Будем также предполагать, что обмотка статора является первичной и подключается к сети, а обмотка ротора — вторичной.
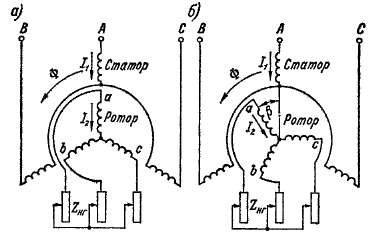
Рассмотрим многофазную асинхронную машийу с заторможенным ротором. Для определенности будем иметь в виду машину с трехфазными обмотками на статоре и роторе (рис. 24-1). Предположим, что первичная обмотка включается в трехфазную сеть с фазным напряжением Uit а к фазам вторичной обмотки подключаются сопротивления нагрузки Zsx.
При указанных условиях асинхронная машина работает как трансформатор. Симметричные первичные фазные токи 1Х создают основную гармонику н. с. с амплитудой на полюс

и первичный вращающийся магнитный поток на один полюс
Индуктируемые во вторичной обмотке токи /2 создают основную гармонику н. с. с амплитудой
 и вторичный вращающийся магнитный поток на полюс
Потоки <&! и Ф2 вращаются с одинаковой скоростью пх (см. § 19-2) и образуют общий вращающийся поток Ф. Потоки Фх и Ф2 по отдель-
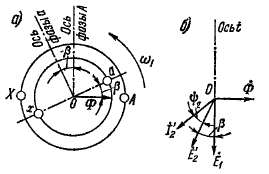
Рис. 24-1. Схемы асинхронной машины с заторможенным ротором при совпадении (а) и несовпадении (б) осей фаз обмоток статора и ротора
ности в действительности не существуют, и магнитное состояние машины и степень насыщения магнитной цепи определяются величиной результирующего потока Ф.
Как и у трансформатора, результирующий поток индуктирует в первичной и вторичной обмотках э. д. с. Ег и Е2, величины которых определяются равенством (20-19). Величина напряжения на сопротивлении нагрузки U2 равна Е% минус падение напряжения во вторичной обмотке.
Приведение обмотки ротора к обмотке статора.
В тех же целях, как и для трансформатора, приведем вторичную обмотку асинхронной машины к первичной. Для этого можно представить себе, что реальная вторичная обмотка заменяется приведенной, которая устроена так же, как и первичная обмотка, и имеет с нею одинаковые числа фаз и витков в фазе, а также одинаковый обмоточный коэффициент основной гармоники.
Приведенные величины будем обозначать штрихами. Приведенные напряжения и токи вторичной обмотки должны быть рассчитаны так, чтобы энергетические и основные электромагнитные соотношения в машине не нарушались.
В общем случае надо иметь в виду, что пазы ротора и статора асинхронной машины могут быть скошены относительно друг друга. Обычно в асинхронных машинах скошены пазы ротора, а пазы статора являются прямыми. Поэтому при приведении обмотки ротора к обмотке статора необходимо представить себе, что приведенная обмотка ротора также имеет прямые пазы. Таким образом, в приведенной машине основные гармоники полей статора и ротора и их результирующего поля будут ориентированы вдоль прямых пазов, в осевом направлении, т. е. эти поля не будут скошены в тангенциальном направлении. Поэтому соотношения между неприведен-ными и приведенными величи-нами целесообразно установить, исходя из нескошенного магнитного поля. Для ясности положим, что выражения для обмоточных коэффициентов статора ko61 и ротора ko62 содержат в качестве сомножителей только коэффициенты укорочения и распределения обмотки, а влияние скоса будем учитывать с помощью коэффициента скоса kc [см. равенство (20-3)], вводимого в качестве дополнительного множителя.
Нескошенное магнитное поле основной гармоники с потоком величиной Ф индуктирует в обмотке неподвижного ротора со скошенными пазами э. д. с.
Согласно выражениям (24-5) и (24-6),
 Приведенная обмотка ротора с приведенным током /£ создает основную гармонику н. с, которая ориентирована в осевом направлении и имеет амплитуду
Неприведенная обмотка ротора создает основную гармонику н. с, которая ориентирована вдоль скошенных пазов ротора и имеет амплитуду
Это выражение не содержит коэффициента kc. Однако при вычис-лещпмютокосцепления взаимной индукции с обмоткой статора, соз* даваемого н. с. Ftt надо учитывать коэффициент скоса kc, так как, н. с. fg и создаваемый ею поток скошены относительно обмотки статора. Поэтому в отношении статора эффективной является н. с. kj и при приведении должно быть соблюдено равенство
Исходя из этого равенства и используя написанные выше выражения для Fj и Рг, найдем для коэффициента тра н-с -формации, или приведения, токов
следующее выражение:
 Для короткозакйснутой обмотки в виде беличьей клетки щ = ttf Z2, ш2 = г!%, k&6% — 1 я 1% представляет собой ток стержня.
Коэффициенты трансформавди \ и к, при тх ^ щ не равны, Э»ак как при данном токе / намагничивающее действие и н. с. обмотки зависит от числа фаз т и нря яр«ведед»и вторичная обмотка с числом фаз щ заменяется обмоткой с числом фаз т*. В otличйe от транс*
форматора для асинхронной машины в выражения для k,, и kl входят также обмоточные коэффициенты.
При отсутствии взаимного скоса пазов в равенствах (24-8) и (24-10) необходимо положить kz = 1.
Обычно скос пазов относительно невелик и коэффициент kc близок к единице. Если, например, скос пазов ротора Ьс равен зубцовому делению статора, то при количествах пазов статора на полюс ZJ2p = 3 и 6 соответственно имеем bjx = 1/3 и V6. При этом, согласно выражению (20-3), получим соответственно kc =
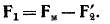
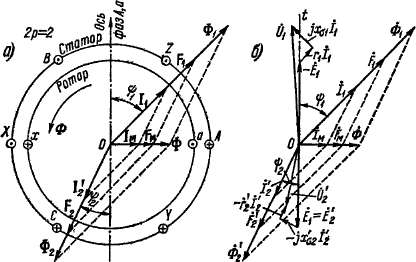 Рис 24-2 Пространственная (а) и временная (б) векторные
диаграммы асинхронной машины с заторможенным ротором
при совпадении осей фаз статора и ротора
= 0,955 и 0,989. Тем не менее и при относительно небольшом скосе, как будет показано ниже, заметным образом возрастает электромагнитное рассеяние машины.
Пространственные и временные векторные диаграммы. Рассмотрим пространственные и временные фазовые соотношения (сдвиги по фазе) первичных и вторичных электромагнитных величин и допустим сначала, что оси фаз обмоток статора и ротора совпадают (рис. 24-2). При этом, не нарушая общности выводов, будем иметь в виду для простоты двухполюсную машину с трехфазными обмотками на статоре и роторе и построим пространственную (рис. 24-2, а) и временную (рис. 24-2, б) векторные диаграммы токов, намагничивающих сил и потоков. На временной векторной диаграмме будем откладывать векторы э. д. с. и токов фаз Лий.
Положительная пространственная ось фаз Л и а обмоток статора и ротора на рис. 24-2, а и ось времени диаграммы рис. 24-2, б направлены вверх. Токи в фазах Л и а положительны, когда они создают потоки в направлении положительных осей этих фаз, т. е. когда
эти токи в правых проводниках Л и а (рис. 24-2, а) направлены за плоскость рисунка. Положительные направления э. д. с. совпадают с положительными направлениями токов. Потокосцепления или полные потоки фаз Ana положительны и максимальны, когда ось результирующего магнитного потока на рис. 24-2, а направлена вверх. Как было установлено в § 19-2 и 22-3, амплитуда вращающейся н. с. многофазной обмотки при симметричной ее нагрузке в момент максимума тока в данной фазе совпадает с осью этой же фазы. Поэтому при положительных и максимальных токах 11М=г}^2 1г и /2m = |^2 /2 в фазах А я а векторы н. с. первичной и вторичной обмоток Ana будут на рис. 24-2, а также направлены вверх. Чере^, дование фаз на рис. .24-2, а выбрано таким, чтобы направления вращения магнитного поля на рис. 24-2, а и векторов на рис. 24-2, б были одинаковы.
Диаграмма рис. 24-2, а построена для момента времени, когда потокосцепления фаз А и а от результирующего потока Ф равны нулю и достигают положительных максимумов через четверть периода тока. При этом пространственный вектор потока Ф на рис. 24-2, а и временной вектор этого же потока Ф на рис. 24-2, б будут направо лены одинаково, а именно вправо.
Э, д. с. £х и Ёъ или э. д. с. Ei и £а, индуктируемые в фазах А: и а результирующим потоком Ф, вследствие совпадения осей этих фаз обмоток совпадают ио фазе во времени (рис. 24-2, б). В рассмат-: риваемый момент времени они проходят через отрицательный максимум, как это следует из рис. 24-2, б и как это можно также установить-из рис. 24-2, а по правилу правой руки.
Если нагрузочное сопротивление ZHf (см. рис. 24-1) имеет активную и индуктивную составляющие, то ток /g отстает от э. д. с. j§a на некоторый угол ij)2 (рис. 24-2, б). Временной вектор н. с. вторичной обмотки £^ = kcB% и временной вектор потока вторичной обмотки Ф£ = £сФа совпадают по фазе с вектором тока (рис. 24-2, б). Согласно рис. 24-2, б, ток /£ достигнет своего отрицательного максимума через отрезок.времени, соответствующий'углу; •ф2. В момент достижения током фазы а отрицательного максимума пространственный вектор н. с. Fg на рис. 24-2, а будет направлен вертикально вниз. Так как векторы на рис. 24-2, an б совершают один оборот в течение одного периода тока и поэтому в течение одинаковых отрезков времени поворачиваются на одинаковые углы, то вектор Fa на рис. 24-2, аъ рассматриваемый момент времени также будет сдвинут от отрицательного направления вертикали в сторону отставания на угол гр2„
Пространственный вектор основной гармоники результирующей н. с. обмоток статора и ротора
представляет собой геометрическую сумму их н. с. и будет совпадать на рис. 24-2, а с направлением вектора Ф. Исходя из соотношения (24-11), на рис. 24-2, а можно построить также пространственный вектор н. с. первичной обмотки:
Пространственный вектор потока первичной обмотки Фх совпадает в пространстве по фазе с вектором Ft (рис. 24-2, а), и для векторов потока существует соотношение
аналогичное соотношению для пространственных векторов соответствующих н. с.
Как видно из рис. 24-2, а, вектор н. с. ¥г при своем вращении совпадет с осью фазы А через отрезок времени, соответствующий углу ij?! на рис, 24-2, а. Через такой же промежуток времени ток фазы достигнет своего положительного максимума, и поэтому вектор пер-, вичного тока /i на рис. .24-2, б также будет сдвинут от вертикали в сторону отставания на угол г^.
Параллельно векторам н. с. Ft и F£ на рис. 24-2, а можно построить также пространственные векторы пропорциональных им токов первичной и вторичной обмоток Ii и Y% Эти последние векторы можно рассматривать и как пространственные векторы вращающихся пространственных волн тока или линейной нагрузки первичной и вторичной обмоток (см. § 22-4). Однако при этом необходимо иметь в виду, что в действительности указанные волны тока сдвинуты в пространстве от волн соответствующих н. с. на 90°. Поэтому совмещение направлений этих векторов на рис. 24-2, а соответствует повороту векторов волн тока яа 90° и является в этом смысле условным.
На основании выражений (24-1Х, (24-3) и (24-11) результирующая н. с.
 как и у трансформаторов, называют намагничивающим током. Согласно выражениям (24-12) и (24-13),
Исходя из соотношения (24-13), на рис. 24-2, а можно изобразить также пространственный вектор намагничивающего тока 1М, совпадающий по направлению с вектором результирующего потока Ф. Соотношение (24-13) действительно также для временных векторов 1и 1'ч и /м (рис. 24-2, б). На рис. 24-2, б можно построить также временные векторы потоков и н. с. первичной (Фь Д) и вторичной (Ф^, Fj) обмоток, совпадающие по фазе с токами /х и /д, и их результирующие векторы Ф и F,,
Таким образом, пространственные и временные векторы диаграммы электромагнитных величин асинхронной машины с заторможенным ротором при совпадении осей фаз обмоток статора и ротора совершенно идентичны. В частности, волны н. с. обмоток статора и ротора сдвинуты в пространстве вдоль окружности машины на такие же углы, на какие сдвинуты по фазе токи соответствующих фаз этих обмоток, и т. д.
Очевидно, что все изложенное справедливо и для многофазных машин с любыми, в том числе и неравными, числами фаз статора и ротора и при любом числе пар полюсов машины р. При этом ввиду идентичности электромагнитных величин на протяжении различных пар полюсов можно рассматривать лишь одну пару полюсов или двухполюсную машину. В этом случае углы на рис. 24-2, а являются электрическими, которые больше действительных, геометрических углов В машине в р раз.
Вместо векторов потоков на рис. 24-2, а можно изображать также пропорциональные им и одинаково направленные векторы потоко-сцеплений W этих потоков с фазами обмоток.
Нетрудно также установить, что проекции векторов токов и по-токосцеплений на оси фаз Aw. а (рис. 24-2, а), а также на оси других фаз определяют мгновенные значения токов и потокосцепле-ний соответствующих фаз. Отметим также, что развитые в связи с рассмотрением рис. 24-2, а представления о пространственных векторах широко используются в современной математической теории переходных процессов машин переменного тока.
Систематическое изложение основ этой теории, однако, не укладывается в рамки данной книги.
Диаграмма временных векторов Ф, F, / и Ё (рис. 24-2, б) вполне аналогична соответствующей части векторной диаграммы трансформаторов без учета магнитных потерь. Диаграмму рис. 24-2, б можно дополнить, построив: 1) векторы падений напряжения в активных сопротивлениях (гъ г'%) и индуктивных сопротивлениях рассеяния (xai, хо'ъ) обмоток и 2) векторы напряжений обмоток. Получаемая при этом диаграмма также вполне аналогична диаграмме трансформатора.
Векторы напряжений йу и (У'2 и э. д. с. Ёх и Ё\ также можно перенести на диаграмму рис. 24-2, а, придав им смысл пространственных вращающихся векторов напряжений и э. д. с. Проекции этих векторов на оси фаз обмоток также будут определять мгновенные значения напряжений и э. д. с. соответствующих фаз обмоток.
Случай несовпадения осей фаз обмоток статора и ротора. Предположим для определенности, что ось фазы а ротора сдвинута относительно оси фазы А статора на электрический угол Р в сторону вращения поля (рис. 24-1,6 и 24-3, а). При этом токи обмоток статора и ротора также создают общее вращающееся магнитное поле, однако результирующий вращающийся поток Ф будет набегать на фазу А раньше, чем на фазу а, и поэтому э. д. с. ротора Ё\ будет отставать во времени от э. д. с. статора Ёг на угол р (рис. 24-3, б). Если сопротивление нагрузки ZHr остается неизменным, то ток Гг будет отставать от э. д. с. Ё'% на такой же угол а|э2, как и на рис. 24-2, б, однако по сравнению со схемой рис. 24-2 ток \'% также будет отставать во времени на угол р. Поэтому на рис. 24-3, а пространственная сину' соидальная волна или вектор вращающейся вторичной н. с. F£ достигнет оси фазы а и совпадет с ней по направлению на некоторый отрезок времени позднее, чем на рис. 24-2, а. Величина этого отрезка времени соответствует повороту вектора F'% на угол р. Поскольку, однако, на рис. 24-3 ось фазы а сдвинута на угол р вперед, то отсюда следует, что вектор F£ и в этом случае займет по отношению к вектору Ф и другим векторам такое же положение, как и на рис. 24-2, а. Иными словами, перемещение обмотки ротора на угол р в сторону вращения поля вызывает отставание векторов тока 1^ и н. с. F^
Рис. 24-3. Определение характера пространственных и временных векторных диаграмм асинхронной машины с заторможенным ротором при несовпадении осей фаз статора и ротора
относительно оси этой обмотки на угол ($, но вследствие смещения обмотки ротора на такой же угол вперед положение этой н. с. относительно статора и его н. с. не изменится. Поэтому останутся неизменными также результирующая н. с. FM и результирующий поток. Не изменится также режим работы машины в целом и вели* ^шны всех токов, напряжений и мощности, за исключением вторичных tqkob, э. д. с. и напряжений, которые изменятся по фазе* Пространственная векторная диаграмма рис. 24-2, а также останется неизменной. При этом нетрудно установить, что проекции векторов рис. 24-2, а на оси фаз будут правильно определять истинные мгновенные значения токов и потокосцеплении фаз статора и ротора при. любом положении ротора.
Таким образом, режим работы заторможенной асинхронно^ машины не зависит от положения ротора, если не учитывать незна* чительного влияния, вызываемого изменением взаимного положения зубцов статора и ротора при изменении положения послед» него.
При любом положении ротора полностью действительны также пространственная векторная диаграмма рис. 24-2, а и временная векторная диаграмма рис. 24-2, б. При использовании временной диаграммы рис. 24-2, б надо только иметь в виду, что при р" ^ь О реальные вторичные токи и «апряжения сдвинуты по сравнению с их положением нарис. 24-2, б на угол р\ и в общем случае представленное на рис. 24-2, б сложение векторов 1г и Г% необходимо истолковывать в смысле геометрического сложения вращающихся волн н. a Fj и F^ соответственно рис, 24-2, а.
§ 24-2. Приведение рабочего* процессу асинхронной машины при вращающемся роторе к рабочему процессу при неподвижном роторе
Общие положения. При неподвижном роторе, как было установлено в § 24-1, асинхронная машина работает как трансформатор., в котором электрическая энергия первичной цепи за вычетом потерь превращается в электрическую же энергию вторичной цепи. Во вращающейся же асинхронной машине в двигательном режиме, работы электрическая энергия, потребляемая первичной обмоткой из питающей сети, за вычетом потерь в машине превращается в механическую энергию на валу машины. В генераторном режиме, наоборот-, механическая энергия, подводимая к валу, превращается в электриче-сжую энергию в первичной обмотке и передается в сеть. Кроме того, режим работы асинхронной машины при вращающемся роторе более сложен в том отношении, что в этом случае частоты токов первичной и вторичной цепей не равны (см. § 19-2), По этой причине, в част-
ности, невозможно изображение первичных и вторичных электрических величин на общих временных векторных диаграммах.
Вследствие изложенного, естественно, возникает мысль о замене вращающейся асинхронной машины эквивалентной ей по энергетическим И электромагнитным соотношениям машиной с заторможенным ротором или, иначе говоря, о приведении режима работы вращающейся асинхронной машины к эквивалентному режиму работы этой же машины при неподвижном роторе.
Такое приведение оказывается возможным потому, что и при вращающемся роторе н. с. и магнитные поля обмотки статора и ротора вращаются синхронно и образуют общее вращающееся поле (см. § 19-2), точнее, потому, что<вид и характер пространственной векторной диаграммы асинхронной машины (см. рис. 24-2, а) одинаковы как при неподвижном, так и при вращающемся роторе. Действительно, в § 24-1 было показано, что диаграмма рис. 24-2, а при всех положениях ротора относительно статора одинакова, если только одинаковы действующие значения вторичных токов и их фазные сдвиги Относительно вторичных э. д. с. При вращающемся с заданной скоростью роторе асинхронной машины и установившемся режиме ее работы действующее значение вторичного тока и его сдвиг относительно э. д. свторйчнойг обмотки, индуктированной результирующим потоком, также неизменны, так как-неизменны активные сопротивления и индуктивные сопротивления рассеяния вторичной обмотки. Поэтому при любом положении ротора» т. е. в любой момент времени, пространственная диаграмма векторов рис. 24~2, а также неизменна.
В связи с изложенным можно заключить, что при приведении режима работы ^вращающейся машины к эквивалентному режиму неподвижной машины необходимо, чтобы ее пространственная векторная диаграмма не изменилась, т. е. чтобы сохранились величины токов ив. с обмоток и их фазные сдвиги относительно друг друга. При этих условиях остаются неизменными величины результирующих н. с. и магнитных потоков, энергия магнитных полей, потребляемой из сети первичной мощности, магнитных и электрических потерь в статоре, передаваемой через магнитное поле со статора на ротор электромагнитной мощности и т. д. Единственным существенным отличием неподвижной машины будет то, что в ней не происходит преобразования механической энергии в электрическую и гэбратно. Поэтому при переходе к неподвижной машине механическая мощность должна быть представлена равной ей электрической мощностью.
Количественные соотношения. Величину э. д. с, индуктируемой результирующим магнитным потоком Ф в фазе вторичной
обмотки при неподвижном роторе, когда s == 1 и /2 = /ь будем по-прежнему обозначать буквой Е2, а величину этой э. д. с. при той же величине потока Ф, но при любом скольжении s, когда /2 = sfly обозначим £2S. При этом
Частота тока -вторичной цепи пропорциональна скольжению. Поэтому величины активного сопротивления г2 и индуктивности рассеяния L2 вторичной цепи при заметном проявлении поверхностного эффекта будут зависеть от частоты f2 = sfi или скольжения s.< Однако влияние поверхностного эффекта может быть учтено особо, и поэтому положим здесь r2 = const и L2 ;= const. Тогда индуктивное сойротивление рассеяния вторичной цепи пропорционально скольжению:
xais = 2it/2L2 = 2nsf1L2 = sx02.
Здесь ха% — индуктивное сопротивление рассеяния вторичной цепи при неподвижном роторе или при /а = flt a xais — величина этого сопротивления при любом скольжении.
Величины полного сопротивления вторичной цепи при неподвижном и вращающемся роторе соответственно будут
Если к вторичной обмотке подключено некоторое внешнее сопротивление, то г3 и ха2 должны включать в себя также составляющие этого сопротивления.
Согласно выражениям (24-15) и (24-16), величина вторичного тока /2 при вращающемся с любым скольжением роторе
Разделим числитель и знаменатель правой части (24-17) на s. Тогда
Левая часть равенств (24-17) и (24-18) представляет собой комплекс вторичного тока при вращающемся роторе, который при переходе машины к эквивалентному режиму с неподвижным ротором
   
 остается неизменным. В числителе правой части выражения (24-18) стоит величина вторичной э. д. с. при неподвижном роторе. Поэтому знаменатель правой части (24-18) указывает на то, что при переходе машины к режиму с неподвижным ротором для сохранения величины и фазы вторичного тока неизменными вторичная цепь должна обладать сопротивлением
Если, например, s = 0,05, то 1/s = 20 и сравнение равенств (24-17) и (24-18) показывает, что при переходе машины к режиму с неподвижным ротором э. д. с. вторичной цепи увеличивается в 20 раз и одновременно во столько же раз должны быть увеличены обе составляющие вторичного сопротивления. При этих условиях как величина тока /2, так и величина его фазного угла сдвига
= ^а = -^г (24-20)
 остаются, естественно, неизменными.
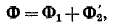
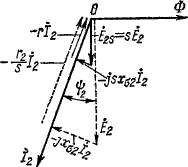
Векторные диаграммы вторичной цепи асинхронного двигателя при вращающемся роторе и в эквивалентном режиме с неподвижным ротором изображены на рис. 24-4. Следует иметь в виду, что в рассматриваемых двух режимах частоты тока /2 различны.
Равенства (24-17) и (24-18) показывают, что при переходе машины в режим работы с неподвижным ротором э. д. с. и индуктивное сопротивление вторичной цепи будут соответствовать реальным значениям этих величин при неподвижном роторе, но вместо активного сопротивления г2 эта цепь должна содержать сопротивление rjs, т. е. активное сопротивление должно быть увеличено на величину
В двигательном режиме (0 < s < 1) величина г2д положительна. Например, при s = 0,05 будет г2д = 19г2.
  Рис. 24-4. Векторная диаграмма вторичной цепи асинхронного двигателя при вращающемся (сплошные веьто-ры) и неподвижном (штриховые векторы) роторе
Величина электромагнитной мощности Р8м, передаваемой посреди ством магнитного поля со статора на ротор, в обоих рассматриваемых режимах одинакова. Одинаковы также электрические потери во вторичной обмотке машины:
Разность мощностей Р9м и рЭЛ2-в обоих режимах тоже одинакова. В реальном рабочем режиме с вращающимся ротором разность этих мощностей превращается в механическую мощность на роторе
В эквивалентном режиме механическая мощность равна нулю; так как ротор неподвижен, но при этом развивается электрическая мощность в добавочном сопротивлении ггл. Очевидно, что эта щощ* ность должна быть равна механической мощности в режиме с вращающимся ротором:
Таким образом, мощность, выделяемая в трех фазах в сопротивлениях г2д, равна механической мощности вращающейся машины.
В рассматриваемых выше выражениях были использованы не* приведенные значения вторичных величин. Вместо них, как будет выяснено ниже, можно пользоваться также приведенными величинами.
§ 24-3. Уравнения напряжений асинхронной машины и их преобразование
Уравнения напряжений неприведенной асинхронной машины.
Составим уравнения напряжения для одной фазы первичной обмотки и одной фазы вторичной обмотки асинхронной машины с вращающимся ротором. В соответствии с изложенным в § 24-1 и 24-2 эти уравнения можно написать для такого момента времени или положения ротора, когда оси рассматриваемых фаз двух обмоток совпадают. Предположим, что вторичная цепь замкнута накоротко и поэтому ее напряжение равно нулю. Допустим также, что магнитные потери в сердечниках статора и ротора равны нулю. Сначала напишем уравнения для неприведенной вторичной обмотки.

При перечисленных предположениях уравнения напряжения можно написать в следующей форме:
Здесь иг — первичное фазное напряжение; 1Х и /2 — первичный и вторичный фазные токи: гх, г2 — первичное и вторичное активные сопротивления; xn, xa2 — первичное и вторичное индуктивные" сопротивления рассеяния, включающие пазовое, лобовое, дифференциальное рассеяния и рассеяние по коронкам зубцов (см. § 23-3): хт1, хп — первичное и вторичное главные собственные индуктивные сопротивления, учитывающие основные гармоники магнитного поля в воздушном зазоре (см. § 23-2); хп1, хпг — взаимные индуктивные сопротивления первичной и вторичной обмоток от основных гармоник поля в воздушном зазоре, причем в общем случае хтП ф хпг (см. § 23-2).
Все перечисленные сопротивления х соответствуют первичной частоте. Множители s в уравнении (24-26) учитывают то обстоятельство, что при вращающемся роторе вторичные частота,- э. д. с. и индуктивные сопротивления пропорциональны скольжению s. Э. д, с, взаимной индукции во вторичной обмотке
индуктированная первичным током и соответствующая последнему члену (24-26), также пропорциональна s, поскольку скорость вращения первичного поля относительно вторичной обмотки также пропорциональна скольжению.
Суммы носледних двух членов (24-25) и (24-26), взятые с обратным знаком, представляют собой э. д. с, индуктированные в первичной и вторичной обмотках результирующим магнитным потоком основных гармоник полей статора и ротора:
Преобразование уравнений напряжений и приведенные параметры машины. Разделим, во-первых, все члены уравнения (24-26) на s, что, согласно изложенному в § 24-2, соответствует переходу
к машине с заторможенным ротором. Во-вторых, перейдем к приведенным вторичным величинам, для чего в соответствии с соотношением (24-9) сделаем в (24-25) и (24-26) подстановку
и умножим также уравнение (24-26) на ku [см. равенство (24-8)1. Последняя операция, согласно выражению (24-7), соответствует приведению падений напряжения и э. д. с. реальной вторичной обмотки, представленных членами уравнения (24-26), к значениям этих величин для приведенной обмотки. В результате вместо (24-25) и (24-26) получим
коэффициентом приведения сопротивлений вторичной цепи к первичной. На основании выражений (24-8) и (24-10)
 В равенство (24-30) можно ввести приведенные значения вторичных активного сопротивления и индуктивного сопротивления рассеяния:
Другие члены (24-29) и (24-30) преобразовываются следующим образом.
Приведенные величины индуктивных сопротивлений взаимной индукции, согласно выражениям (23-17), (23-18), (24-8) и (24-10),
будут
 Таким образом, приведенные взаимные индуктивные сопротивления оказываются равными главному индуктивному сопрб-тивлению первичной обмотки, обусловленному основной гармоникой поля этой обмотки.
Этот результат вполне естествен, так как после приведения первичная и вторичная обмотки становятся одинаковыми и поэтому их главные собственные и взаимные индуктивные сопротивления должны быть равны.
Далее, для третьего члена правой части (24-30) на основании выражений (23-14), (24-8) и (24-10) получим
 Определение индуктивного сопротивления рассеяния скоса. При
отсутствии скоса (kc = 1), согласно выражению (24-36), х/% = хгЪ т. е. главные индуктивные сопротивления первичной и приведенной вторичной обмоток равны, что также является естественным.
Однако при наличии скоса (kc ^ 1) будет Хг2 > х1г, что указывает на то, что в этом случае возникает дополнительное электромагнитное рассеяние за счет основной гармоники поля вторичной обмотки. Физически это обусловлено тем, что при наличии скоса пазов э. д. с. взаимной индукции уменьшается.
Приведенное значение индуктивного сопротивления рассеяния вторичной обмотки от скоса пазов, таким образом, равно

или, согласно (24-36),
 Несмотря на то что kc может мало отличаться от единицы, значение Хс2 по сравнению с другими составляющими индуктивного сопротивления рассеяния достаточно велико, так как хг1 является большой величиной. Если, например, kc = 0,99 и хгЫ — 4,0, то *с2* — 0.0813, что составляет весьма значительную величину..
Согласно (24-37), приведенное значение вторичного главного сопротивления
представляется в виде суммы главного индуктивного сопротивления приведенной вторичной обмотки и индуктивного сопротивления рассеяния скоса.
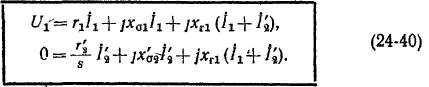
Окончательный вид уравнений напряжения асинхронной машины с приведенной вторичной обмоткой при отсутствии магнитных noTeja». Заменим в выражениях (24-29) и (24-30) произведения коэффициентов приведения и сопротивлений значениями этих произведений по равенствам (24-За), (24-34), (24-35) и (24-39). Объединив при этом величину х'^ с *оа и сохранив для суммы xL -f х'^ обозначение х'м, получим
В выражении (24-40) сопротивление рассеяния Ха2 включает в себя все составлдющие сопротивления рассеяния вторичной обмотки, в том числе сопротивление рассеяния скоса.
Последние члены уравнений (24-40), взятые <с обратным знаком, представляют собой э. д. с. Е± — Е'а, индуктированные в первичной и вторичной приведенной обмотках результирующим потоком основных гармоник полей статора и ротора:
Нетрудно установить, что в результате приведения вторичной обмотки к первичной все энергетические соотношения сохраняются.
Например, согласно выражениям (24-28), (24-33), (24-32) и (24-10), электрические потери в приведенной вторичной обмотке
равны потерям в действительной вторичной обмотке.
Отметим также, что приведение вторичной обмотки к первичной можно в принципе выполнять также с коэффициентами ka и kh отличающимися от соотношений (24-8) и (24-10),
В частности, эти коэффициенты можно выбрать такими, что индуктивное сопротивление рассеяния скоса будет фигурировать в качестве составляющего, индуктивного сопротивления рассеяния первичной цепи, а не вторичной. Можно также распределить сопротивление рассеяния скоса между обеими цепями. Однако подобный подход нерационален, так как это без надобности усложняет расчеты. К тому же скос в асинхронных машинах обычно выполняется на роторе, т. е. на вторичной стороне машины. Поэтому и с физической точки зрения это сопротивление рассеяния целесообразно отнести к вторичной цепи.
О расчете индуктивного сопротивления рассеяния скоса. Относительную магнитную рроводимость рассеяния скоса кс, входящую в (23-45), можно определить по формуле (23-42), заменив там кх на %z и хд на *с2 из (24-38) и подставив значение хп из (23-10), Тогда получим
   Выражение (2442) в таком виде пригодно для вычисления значения сопротивления рассеяния скоса, приведенного к первичной обмотке, причем в множитель перед Хс в выражениях вида (23-45) необходимо включить обмоточные данные первичной обмотки.
Исисшьзуя формулу (20-3), величину Vkl можно разложить в степенной ряд и при bjx < 0,3 можно учесть только два первых члена ряда. Тогда
§ 24-4. Схемы замещения асинхронной машины
Т-образная схема замещения. Уравнениям (24-40), как нетрудно видеть, соответствует схема замещения рис. 24-5. Сопротивлением намагничивающей цепи является главное индуктивное сопротивление первичной обмотки, и по этой цепи протекает намагничивающий ток
Напряжение на зажимах 1 я 2 намагничивающей цепи
с/12 = £i = £<!•
Схема замещения рис. 24-5 не учитывает магнитных потерь в сердечниках машины.
Потери в сердечнике статора (первичной цепи) могут быть учтены при fx = const аналогично тому, как это было сделано для трансформатора, путем включения на зажимы / и 2 схемы рис. 24-5 параллельно сопротивлению хл активного сопротивления гмг такой величины, что потери в нем будут равны магнитным потерям в сердечнике статора на одну фазу:
Величину гмг можно найти, если из опытных или расчетных данных известны потери в сердечнике статора рмг1 при определенном Ех или определенном магнитном потоке. Обычно гмг ^> хт1.
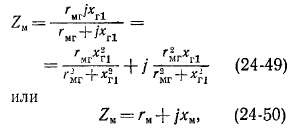
Параллельно включенные сопротивления гмг и хп можно объединить в одно общее сопротивление намагничивающей цепи
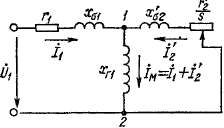 Рис. 24-5. Т-образная схема замещения асинхронной машины без-учета магнитных потерь
причем гя <^ хи. В результате вместо схемы рис. 24-5 получим -ехему рис. 24-6, а, которая в несколько ином виде представлена на рис. 24-6, б. При этом
соответствующее механической мощности, развиваемой на роторе машины. Схема рис. 24-6, б аналогична схеме замещения трансформатора, к вторичным зажимам которой подключено нагрузочное сопротивление г'л2.
Намагничивающий ток схем рис. 24-6 содержит, кроме реактивной составляющей 1МГ, также активную составляющую /мй, соответствующую магнитным потерям в статоре:
Непосредственный учет магнитных потерь в сердечнике ротора (вторичной цеий) в схеме замещения сложен, так как частота пере-магничивания этого сердечника /2 == $г при изменении s изменяется, в результате чего указанные потери при fx = const не пропорциональны Е\ г^> ф2. В нормальных рабочих режимах машины
(О < s ==£ 0,05) вследствие малой частоты перемагничивания эти потери вообще незначительны и их можно не учитывать. Если же учет этих потерь все же необходим, то следует иметь в виду, что они покрываются за счет^ механической мощности.
Параметры схемы замещения в относительных единицах 'для нормальных асинхронных машин мощностью в несколько киловатт и выше находятся в следующих пределах: хя% = 2-5-4; гм - 0,08 + 0,35; гы » г„ =. = 0,01 -*- 0,07; хл, & xot = = 0,08 -ь 0,13. С увеличением номинальной мощности к. п. д. машины увеличивается, а отно-сительные величины потерь уменьшаются, соответственно чему уменьшаются также относительные величины активных сопротивлений. "Величина хм„. умевь* шается с увеличением числа иолюсов машины, так как при этом уменьшается отношение т/б [см. равенство (23-23)].
Из приведенных данных видно, что сопротивление намагни* чнвающей цепи схемы замещения асинхронных машин значительно/ меньше, чем у трансформаторов. Это объясняется наличием в маг« яйтной цепи асинхронных машин воздушного зазора между статором и ротором. В связи^с этим надайшчивающий ток Л ток хо-лостбго хода асинхронных машин значительно выше{/м'% *= 0,25-4--!>0,$0), чем у трансформаторов.
Из схем замещения рис, 24-6 можно сделать вывод, чтй ври ymf дичекии /i, т.-е. при увеличении нагрузки мацщны, велйчдаы JEj rsj ф при U = const будут уменьшаться. Однако » пределах' нормальных рабочих нагрузок изменение потока машины цевеликЗ* я составляет лишь несколько дродентов.
Г-образная схема замещения. Сх«^ы замещения, изобр^жейные на рис. 24-5 и 24-6, хорошо отражают реальныефизически,€ процессы,
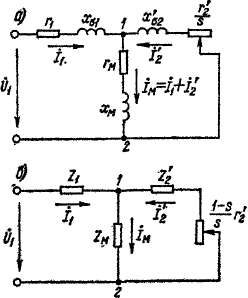 Рис 24-6* Т-образные схемы замещения асинхронной машины с учетом магнитных потерь
происходящие в машине, так как при отсутствии скоса пазов напряжение намагничивающей цепи и намагничивающий ток соответствуют реальному потоку основной гармоники поля. Однако для исследования некоторых вопросов эти схемы несколько неудобны, так как их цепи разветвлены и напряжение на зажимах параллельной цепи Un при иг — const непостоянно. Более удобной в этом отношении является схема замещения, в которой зажимы параллельной цепи вынесены на первичные зажимы, под напряжение Ux. Из рассмотрения рис. 24-6 и уравнений (24-40) видно, что в подобной схеме сопротивление, соответствующее на рис. 24-6 и в выражениях (24-40) сопротивлению Zx = гх + }хаъ должно быть равно нулю. Для достижения этого равенства необходимо произвести соответствующее преобразование уравнений напряжения машины.
Составим по правилу контурных токов уравнения напряжений схемы рис. 24-6, б:
Уравнения (24-54) и ^24-55) можно получить также из уравнений (24-40), если ввести в них Zx и Z'4 из (24-51) и заменять jxtl на Z№,
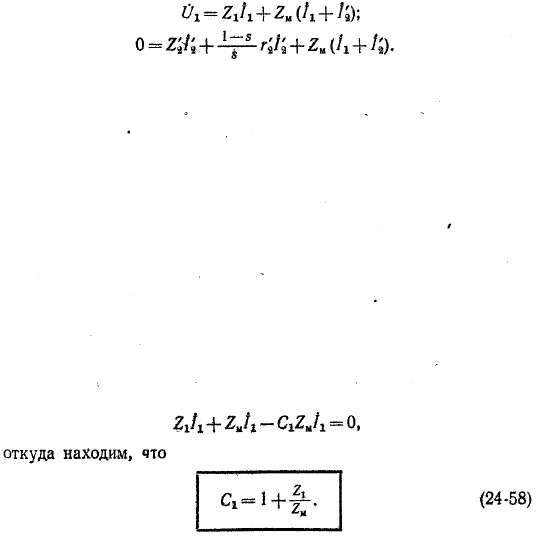
Для преобразования уравнений (24-54) и (24-55) перейдем в них от переменной /£ к новой переменной /£' по равенству
где Сх — некоторое^ неопределенное пока комплексное число. Эту операцию можно рассматривать как новое приведение вторичной цепи, причем Сх является коэффициентом приведения, а /«' — новым приведенным током.
Подставим /^ из (24-56) в (24-54) и прибавим и вычтем в лравой части член CiZjv Тогда^ получим
О г *= Zjx + Zjx - CjJi + СА (h + Л'). (24-57)
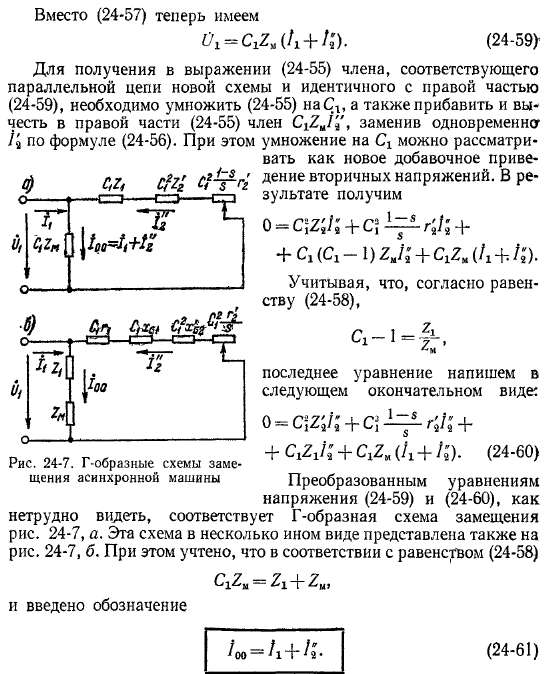
Очевидно, что последний член (24*57) соответствует намагничивающей, или параллельной, цепи новой схемы замещения. На основании изложенного для получения Г-образной схемы замещения в выражений (24-57) необходимо положить
Ток 100 представляет собой первичный ток идеального холостого хода асинхронной машины, когда ее ротор вращается с синхронной скоростью (s = 0).
Для этого режима сопротивления схем замещения
в результате чего в этих схемах /^ = /j = 0 и через намагничивающую цепь протекает ток
Так как сопротивление Zx + ZM от скольжения s не зависит, то при иг = const и /х = const также /00 = const.
При s = О поток статора вращается синхронно с ротором, вследствие чего, естественно, /2 = 0 и машина не развивает вращающего момента. Поэтому асинхронный двигатель мог бы достичь синхронной скорости (s = 0) на холостом ходу, без нагрузки на валу, только в идеальном случае; когда механические потери, магнитные потери в роторе и добавочные потери, обусловленные зубчатостью ротора, были бы равны нулю и движение ротора не испытывало бы сопротив-ления. Поэтому осуществить этот режим можно только путем приложения к валу постороннего, или внешнего, двигательного вращающего момента.
При реальном холостом ходе асинхронного двигателя скольжение, хотя и весьма мало (доли процента), но все же отлично от нуля.
В схемах замещения рис. 24-7 сопротивления С1г1 и С\г'^ уже не являются чисто активными, как и ■ сопротивления С±ха1 и С\х'съ не являются чисто индуктивными.
Анализ коэффициента Сг. В соответствии с выражениями (24-50) и (24-51) Cx из (24-58) можно представить в следующем виде:
Мнимая часть С1 отрицательна, так как обычно ггхя > ха1ги. Величину Ci можно представить также в показательном виде:
Поскольку мнимая часть Сг обычно отрицательна, то и ее аргумент тоже отрицателен, в связи с чем в показателе (24-64) введен минус. Тогда величина у положительна. В машинах мощностью 8—10 кет и выше у < Г. В машинах средней и большой мощности поэтому можно считать, что у « 0 и Сх является вещественным числом. Отметим, что, как это видно из выражения (24-65), наличие магнитных потерь (гя > 0) вызывает уменьшение угла у.
  
В связи с малостью у мнимая часть коэффициента Сх мала, и поэтому его модуль
Последние два равенства в (24-66) представляют собой более грубые приближения. В нормальных асинхронных машинах мощностью выше нескольких «киловатт сх относительно мало отличается от единицы и обычно сх« 1,02 -*■ 1,06., В качестве иллюстрации укажем, что у асинхронного двигателя мощностью Рн = 15 mm пар* аметры схемы замещения в относительных еди* ницах равны: х^ = 4,07; гМ:). = 0,258; rl1c = 0,0421 *01«, = 0,107; гы = 0,027; а:^, = 0,108. При этом в соответствии с приведенными формулами: сх - 1,027 и v = 0°29'.
Величина Сх имеет простую физическую интерпретацию.
Согласно схемам замещения рис. 24-6 и 24-7,, при идеальном холостом ходе
 Рис. 24-8. Векторная диаграмма асинхронной машины при идеальном холостом ходе (s=0)
Таким образом, модуль С\ равен отношению первичного напряжения Vx к первичной з. д. с. Ег при идеальном хо*; лостом ходе, а аргумент Сг — углу между векторами Oi-u —Ёх (рис. 24-8).
§ 24-5. Режимы работы, энергетические соотношения и векторные диаграммы асинхронной машины
Двигательный режим (0<s< 1). Схема замещений асинхронной машины отражает все основные процессы, происхбдящие в ней, и представляет собой удобную осно,ву для изучения режимов работы машины. Рассмотрим, имея в виду схему: замещения рис. 24-6, процесс преобразования активной энергии и мощности при двигательном режиме работы асинхронной машины. В этом режиме передача энергии в схеме рис. 24-6 совершается слева направо.
Асинхронный двигатель потребляет из сети активную мощность
Соотношение (24-74) совпадает с (24-24).
Часть механической мощности Рмх теряется внутри самой машины в виде механических потерь рнх (на вентиляцию, на трение в подшипниках и на щетках машин с фазным ротором, если эти щетки при работе не поднимаются), магнитных потерь в сердечнике ротора ржП и добавочных потерь рд. Последние вызваны в основном
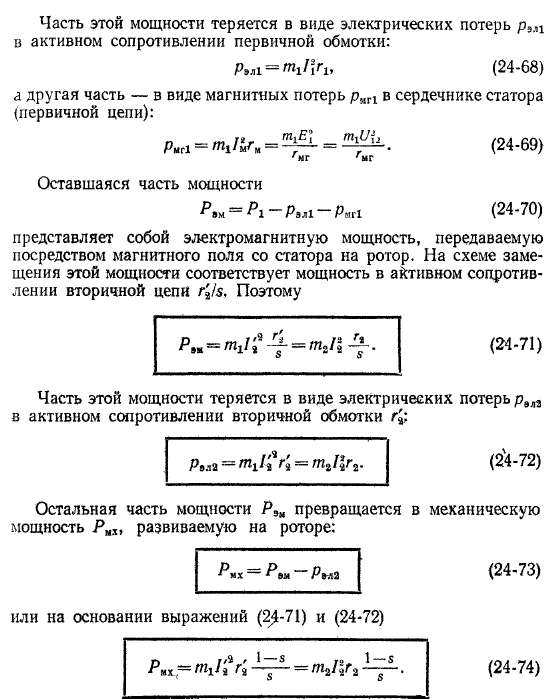
высшими гармониками магнитных полей, которые возникают ввиду наличия высших гармоник н. с. обмоток и зубчатого строения статора и' ротора. Во-первых, высшие гармоники поля индуктируют э. д. с. и токи в обмотках, в связи с чем появляются добавочные электрические потери. Эти потери заметны по величине только в обмотках типа беличьей клетки. Во-вторых, эти гармоники поля обусловливают добавочные магнитные потери на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора. Вращение зубцов ротора относительно зубцов статора вызывает пульсации магнитного потока в зубцах, и поэтому соответствующая часть потерь называется пульсационны-ми потерями. Магнитные потери в сердечнике ротора при нормальных рабочах режимах обычно очень малы и отдельно не учитываются1;
Добавочные потери трудно поддаются расчету и экспериментальному определению. Поэтому, согласно ГОСТ 183—66, их принимают равными 0,5% от подводимой мощности при номинальной нагрузке, а при других нагрузках эти потери пересчитывают пропорционально квадрату первичного тока. Отметим, что в обмотках возникают также добавочные потери от вихревых токов в связи с поверхностными эффектами. Однако эти потери в случае необходимости учитывают соответствующим увеличением сопротивлений гх и г2 и поэтому в величину рд не включают.
Полезная механическая мощность на валу, или вторичная мощность,
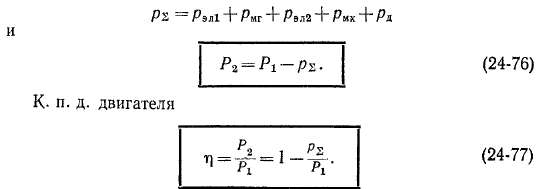
В соответствии с изложенным на рис. 24-9, а изображена энер* гетическая диаграмма асинхронного двигателя. Сумма потерь двигателя
К. п. д. двигателей мощностью Рн = 1 -т- 1000 кет при номинальной нагрузке находится соответственно в пределах т]н =
= 0,72 н- 0,95. Более высокие к. п. д. имеют двигатели большей мощности и с большей скоростью вращения.
В качестве иллюстрации приведем данные о потерях и к. п. д. трехфазного асинхронного двигателя с Ря = 14 кет, ия н = = 220/380 в, /1й = 27,2а (фазный), ^ = 50 гц, 2р = 4, sH = 0^28, ян = 1460 об/мин, cos фн = 0,877. Для этого двигателя в номинальном режиме работы Р2 = р^ = 14 000 в/п, рЭл1 = 770 вт, ркГ = = 318 вт, рЭл2 — 411 вт, рих = 205 вт, рЙ = 79 вт, сумма потерь
 Рис. 24-9. Энергетические диаграммы асинхронной машины при работе в режиме двигателя (а), генератора (б) и противовключения (в)
ръ = 770 + 318 + 411 + 205 + 79 = 1783 вт. Первичная мощность Рх = 14 000 + 1783 = 15 783 вт. К- п. д., согласно равенству (24-77),
Рассмотрим еще некоторые вопросы, относящиеся к асинхронным двигателям.
Из выражений (24-71), (24-72) и (24-73) вытекают следующие важные соотношения:
Из этих соотношений видно, что электромагнитная мощность РЭм подразделяется на составляющие рэл2 и Рмх пропорционально s и (1 — s) и при заданной величине Рви потери р8л2 пропорциональны скольжению s. Поэтому для уменьшения рЭя2 и получения хорошего к. п. д. необходимо, чтобы s было мало. В нормальных асинхронных двигателях при номинальной нагрузке sH = 0,02 -*■ 0,05.
Очевидно, что требование малости sH сопряжено с требованием, малости г2:)..
Отметим, что электрическая мощность
развиваемая во вторичной цепи асинхронного двигателя, называется; также мощностью скольжения.
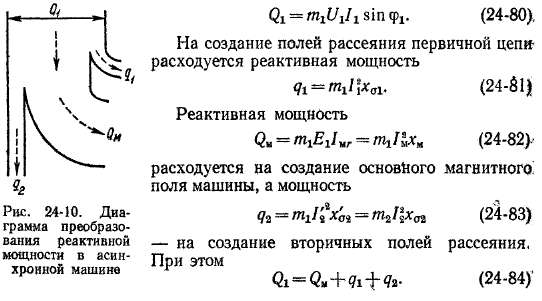
На основе схемы замещения рис. 24-6 можно рассмотреть также баланс реактивных мощностей асинхронного двигателя. Из первичной цепи потребляется реактивная мощность
Диаграмма реактивных мощностей двигателя изображена на рис, 24-10, Основную часть реактивной мощности составляет мощность QM, которая из-за наличия воздушного зазора и большого, намагничявающ'его тока /« значительно больше, чем в трансформаторах. Большие величины QM и /н существенно влияют на коэффициент мощности двигателя и снижают его .величину. Обычно у асинхронных двигателей cos ф„ = 0,70 -*- 0,95. Большие значе-* ния относятся к мощным двигателям с 2р — 2 и 4. При уменьшении' нагрузки cos ф двигателя значительно уменьшается, до значения cgs <ро«0,10 -т- 0,15 при холостом ходе.
Векторная диаграмма асинхронного двигателя строится на основе схемы замещения рис. 24-6 и имеет вид, изображенный на рис. 24-11, а. Она аналогична векторной диаграмме трансформатора и отличается от нее относительно большей величиной намагничивающего тока /м и тем, что электрическая нагрузка вторичной цепи, соответствующая механической мощности РяЖ, является чисто активной. Ввиду малости скольжения сопротивление r'Js1 значительно больше х^, и угол ita поэтому мал.
Генераторный режим (— оо < s < 0). Для осуществления генераторного режима работы асинхронной машины ее нужно включить в сеть переменного тока и вращать с помощью соответствующего приводного двигателя (машина постоянного тока, тепловой или гидравлический двигатель) в сторону вращения магнитного поля со скоростью п, превышающей синхронную скорость пх. Скольжение машины при этом, согласно выражению (19-6), отрицательно.
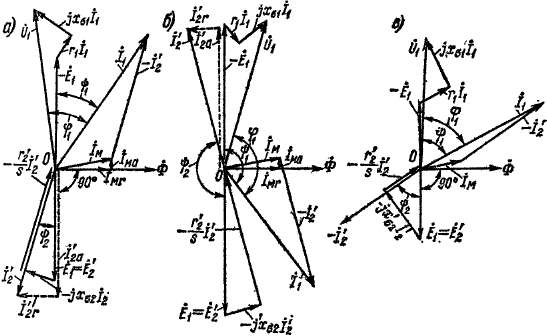 Рис. 24-11. Векторные диаграммы асинхронной машины при работе в режимах двигателя (в), генератора (б) и противовключения (в)
Теоретически скорость п в генераторном режиме может изменяться в пределах пх <п < оо, чему [см. выражение 119-6)] соответствует изменение скольжения в пределах 0 > s > — оо. В действительности высокие скорости вращения недопустимы по условиям механической прочности, а по условиям ограничения потерь и нагревания и сохранения высокого к. п. д. в генераторном режиме возможны абсолютные значения скольжения такого же порядка, как и в двигательном режиме.
Рассмотрим на основании соотношения (24-17) активные и реактивные относительно э. д. с. £2 составляющие токи 1%. Для этого положим в выражении (24-17) й"2 = Ег и умножим числитель и знаменатель на сопряженный комплекс знаменателя. Тогда получим

В двигательном режиме s > 0 и обе составляющие 1га, /2/. тока /2 положительны. Множитель — / перед /2г означает поворот вектора /2Г относительно /2О на комплексной плоскости в сторону вращения часовой стрелки на 90°. Это означает, что /2Г отстает от /2а на 90°, т. е. /2г является индуктивным током.
В генераторном режиме s < 0 и, согласно выражению (24-85),-по-прежнему /2г>0, а величина 1Ы меняет знак, т. е. становится отрицательной и меняет свою фазу на 180°. Физически это объясняется тем, что поле вращается относительно ротора по сравнению с двигательным режимом в обратную сторону, вследствие чего изменяются знаки э. д. с. £2S и активной составляющей тока /2. В результате изменяется также знак вращающего момента, т. е. последний действует против направления вращения и становится' тормозящим.
На основании изложенного на рис. 24-11, б построена векторная диаграмма асинхронного генератора. Вектор первичного тока,
вследствие поворота /^ почти на 180° также поворачивается в сторону вращения часовой стрелки. При этом ц>х > 90° и
т. е. активные составляющие первичного тока и первичной мощности изменяют знак. Это означает, что машина уже не потребляет,, как в режиме двигателя, а отдает в сеть активную мощность и ак-< тивный ток, т. е. работает в режиме генератора и преобразует потребляемую с вала механическую энергию в электрическую.
Направление вектора падения напряжения — -у- /, на диаграмме рис. 24-11, б совпадает с направлением 1'%, так как значение s от-
рицательно и поэтому величина------ положительна.
Из векторных диаграмм рис. 24-11, а и б следует также, что реактивные составляющие первичного тока
и первичной мощности
Ql== ftljUiIi Sin ф!
при переходе машины из двигательного режима в генераторный сохраняют свои знаки. Это означает, что асинхронный генератор также потребляет из сети реактивную мощность и индуктивный ток. Поэтому асинхронный генератор может работать только на сеть» к которой приключены такие электрические машины и устройства (например, синхронные генераторы или компенсаторы, конденсаторы), которые могут являться источниками реактивной мощности,
 
потребляемой асинхронным ренератором для создания в нем магнитного поля или магнитного потока (см. также § 29-2). Потребление асинхронными генераторами реактивной мощности является весьма существенным недостатком, вследствие чего эти генераторы применяются только в очень редких случаях.
Равенства (24-67)—(24-74), (24-78) и (24-79) справедливы также для генераторного режима, если иметь в виду, что в этом режиме s < 0. Изменение знаков мощностей означает изменение направления передачи или превращения энергии.
В генераторном режиме работы сопротивления — и —— г'^
a S
в схемах замещения рис. 24-6 изменяют знак, т. е. становятся отрицательными, что связано также с изменением знаков соответствующих мощностей. Хотя электрические проводники могут иметь только сопротивления г > 0, тем не менее, введение понятия об отрицательных активных сопротивлениях полезно. Если положительные сопротивления г являются потребителями электрической энергии Рг, то отрицательные г необходимо рассматривать как источники, или генераторы, электрической энергии Рг. В частности, генератор постоянного тока в целом можно рассматривать как отрицательное сопротивление
Для ненасыщенного генератора последовательного возбуждения U ~ I, и для него поэтому г = const. Для других генераторов г =f= const. Отрицательные при s < 0 активные сопротивления в схемах рис. 24-6 тоже следует рассматривать как источники электрической энергии, соответствующей потребляемой с вала механической энергии. Поток активной энергии на схемах рис. 24-6 в этом случае идет справа налево.
В соответствии с изложенным на рис. 24-9, б изображена энергетическая диаграмма асинхронного генератора.
Преобразование реактивной мощности в асинхронном генераторе происходит так же, как и в двигателе (рис. 24-10).
Режим противовключения (1 < s < оо). В этом режиме ротор приключенный к сети асинхронной машины вращается за счет подводимой извне к ротору механической энергии против вращения поля, вследствие чего скорость вращения ротора п<0и, согласно выражению (19-6), s> 1. На практике в этом режиме обычно 1 <s<2.
Поскольку как в двигательном, так и в режиме противовключения s > 0, то в соответствии'С выражением (24-85) активные и реактивные составляющие вторичного тока имеют в" режиме противовключения такие же знаки, как и в двигательном. Это означает, что и в режиме противовключения машина потребляет из сети активную мощность и развивает положительный вращающий момент,
действующий в сторону вращения поля. Но, поскольку ротор вращается в обратном направлении, на него этот момент действует тормозящим образом.
В режиме лротивовключения машина потребляет также механическую мощность с вала или с ротора, поскольку внешний вращающий момент действует в сторону вращения ротора. Как мощ-н<!>сть, потребляемая из сети, так и мощность, потребляемая с вала, расходуются на потери в машине. Полезной мощности машина поэтому не развивает, а в отношении нагрева рассматриваемый режим является тяжелым.
Соотношения (24-67)—(24-76) и (24-78),- (24-79) действительны также и для режима противовключения. При s> 1, согласно выражению (24-71), Р»д>0, а согласно выражению (24-78), рЭл2 > >^ft,M. Поэтому получаемая за счет энергии сети и передаваемая на ротор электромагнитная мощность покрывает только часть-потерь во вторичной обмотке. В соответствии с соотношением (24-74) механическая мощность Рт < 0, т. е. эта мощность потребляется с вала. Она покрывает остальную часть потерь во вторичной обмоткв| так как км. равенство (24-73)j
РвЯ% == *вМ ~~ "|Н1
и в данном случае Рвм > 0 и — Рях > 0.
По сравнению с двигательным и генераторным режимами pa«i боты в режиме противовключения сопротивление г%/$ мало. Поэтому; на основании равенства (24-1в) можно заключить, что ток /а и угол; "Ф? == Z (£$» !%) велики. Соответственно этому первичный ток Jt и угол сдвига фаз <рх = L (U%> h) тоже велики. Это также указываем на опасность режима в тепловом отношении. Поэтому при Ux — Uln рассматриваемый режим допускается лишь кратковременно. ,
На основании изложенного и в соответствии со схемами рис. 24-6; на ряе. 24-9, в, изображена энергетическая диаграмма, а на; рис. 24-11,^ —векторная диаграмма асинхронной машины в pej жиме противовключения. Преобразование реактивной мощносг^ э режиме противовключения происходит так же, как и в двигательном (рис. 24-1(3).
режим противовключения на практике исдользуетфя для тормо«, зрвия и остановки асинхронных двигателей и Приводимых нм«, & движение производстееннда механизмов. Например, в ряде слу-ч|ев, при необходимости быетро|г остановки двигателя, путей переключения двух питающих нроводт $рехфззвого щт$шт изменяют чередование фаз и ная^вденне вращения щмя, a potop Вч течение некоторого времени вращй€тея прр этой щ п&щщт в прежаем направлении, т. е. теперь.? уще против нбця. МезШяиче^ екая меадяоеть Рмх [см. равенство ^#74)J в данном щучт щзт-^etca за счет кинетической энергии вращающихся ще£ ШМШшт
уменьшения скорости вращения. При п да 0 машину необходимо отключить от сети, так как иначе она придет во вращение в обратном направлении. Таким же образом может осуществляться быстрый реверс (изменение направления вращения) двигателя, причем в этом случае, естественно, при п да О отключать двигатель от сети не нужно. В начале процесса реверсирования также существует режим противовключения.
Режим противовключения называют также режимом электромагнитного тормоза. Следует, однако, иметь в виду, что существуют и другие способы электромагнитного торможения асинхронной машины.
Режим короткого замыкания. Режимом короткого замыкания асинхронной машины называется ее режим при s = 1, т. е. при неподвижном роторе. Этот режим соответствует начальному моменту пуска асинхронного двигателя из неподвижного состояния. Сопротивление асинхронной машины относительно ее первичных зажимов при s — 1 называется сопротивлением короткого замыкания ZK. Согласно схемам замещения рис. 24-6,
(24-86)
Содержание
Предыдущий § Следующий
| 