|
Содержание Главная (библиотека)
Предыдущий § Следущий
§ 4.9. ИНДУКЦИОННЫЕ МАШИНЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
Асинхронный тахогенератор. Особенностью конструкции асинхронного тахогенератора по сравнению с конструкцией исполнительного двигателя с полым немагнитным ротором (см. рис. 4.64 и описание к нему) является то, что у тахогенератора обычно одна статорная обмотка располагается на наружном статоре, а другая — на внутреннем. Одна из обмоток статора (А, рис. 4.70) является обмоткой возбуждения. К ее зажимам подводится напряжение
сети переменного тока, имеющего частоту f1. Другая обмотка (В) выходная, к ее зажимам присоединяется измерительный вольтметр или усилительная схема, которые представляют собой по отношению к тахогенератору нагрузочное сопротивление Zнг.
Создаваемый обмоткой возбуж: дения пульсирующий поток Ф пронизывает стакан ротора. В результате в его контурах, находящихся в плоскости обмотки возбуждения А (например, в контуре аа'), индуктируется трансформаторная э. д. с, вызывающая токи. Контуры этих токов магнитно связаны с обмоткой возбуждения А и не связаны с перпендикулярной к ней выходной обмоткой В. При неподвижном роторе напряжение на зажимах выходной обмотки В отсутствует, так как обмотка возбуждения А и контуры ротора аа' не наводят в ней никаких э. д. с.
В контурах ротора (вв'), расположенных перпендикулярно плоскости обмотки возбуждения А, магнитный поток Ф индуктирует э. д. с. вращения Ев. Так как поток Ф пульсирует с частотой f1 то э. д. с. Ев и вызываемые ею токи являются переменными и изменяются во времени с той же частотой. Контуры вв' расположены в одной плоскости с выходной обмоткой статора В. Поэтому в результате трансформаторной взаимосвязи в выходной обмотке индуктируется э. д. с, пропорциональная скорости вращения, которая имеет частоту сети f1. Таким образом, в короткозамкнутых кон-
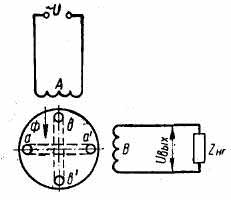 Рис. 4.70. Схема соединения обмоток асинхронного тахогенератора
турах ротора, расположенных перпендикулярно плоскости обмотки возбуждения индуктируется э. д. с. вращения. В результате трансформаторного взаимодействия вызванные ею токи ротора наводят в выходной обмотке статора э. д. с., пропорциональную скорости вращения.
Вследствие падения напряжения в выходной обмотке и влияния токов, вызванных паразитными полями, выходная характеристика Uвых = f(n) асинхронного тахогенератора нелинейна. Ее отклонение от линейной зависимости называется амплитудной по-
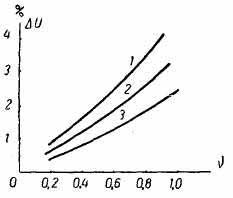 Рис. 4.71. Зависимость амплитудной погрешности от относительной скорости вращения при индуктивном (1), активном (2) и емкостном (3) нагрузочных сопротивлениях
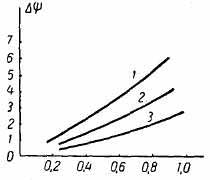 Рис. 4.72. Зависимость фазовой погрешности от относительной скорости вращения при емкостном (1), активном (2) и индуктивном (3) нагрузочных сопротивлениях
грешностью. Зависимость выходной характеристики от сопротивления Zнг измерительного вольтметра для асинхронного тахогенератора приблизительно соответствует характеристике тахогенератора постоянного тока (рис. 2.40). При увеличении нагрузочного сопротивления Zнг крутизна увеличивается, а характеристика приближается к линейной.
В результате взаимодействия токов в стакане полого ротора, вызванных трансформаторными э. д. с. и э. д. с. вращения, фаза напряжения Uвых выходной обмотки зависит от скорости вращения. Изменение фазы выходного напряжения называется фазовой погрешностью.
Наименьшая амплитудная погрешность имеет место при активно-емкостной нагрузке (рис. 4.71), наименьшая фазовая погрешность — при активно-индуктивной нагрузке (рис. 4.72). Анализируя погрешности (рис. 4.71 и 4.72), можно заметить, что при снижении относительной скорости вращения υ все погрешности уменьшаются. Поэтому для снижения погрешностей следует увеличивать частоту f1 питающей сети, так как при этом уменьшается υ, вследствие увеличения базисной скорости вращения n0.
При увеличении активного сопротивления стакана ротора все погрешности тахогенератора резко снижаются, но уменьшается крутизна выходных характеристик. Для увеличения активного сопротивления полого ротора его изготовляют из фосфористой бронзы, при этом крутизна выходных характеристик асинхронного тахогенератора обычно составляет 5÷10 в на 1000 об/мин. Изменение сопротивления стакана полого ротора при нагреве существенно влияет на величину погрешности. Для уменьшения температурной погрешности роторы асинхронных тахогенераторов иногда
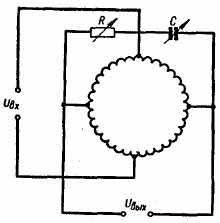 Рис. 4.73. Мостиковая схема соединения обмоток статора тахогенератора для уменьшения остаточного напряжения
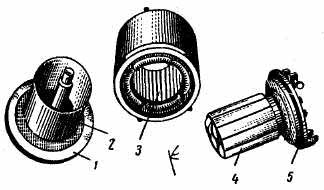 Рис. 4.74. Асинхронный тахогенератор с полым немагнитным ротором (обмотки расположены на наружном и внутреннем статорах): 1 — подшипниковый щит; 2 — полый ротор; 3 — наружный статор; 4 — внутренний статор; 5 — подшипниковый щит
изготовляют из марганцевистого алюминия, имеющего малый температурный коэффициент.
Погрешность тахогенератора может быть также вызвана остаточным напряжением при неподвижном роторе, которое имеет место вследствие неточного смещения осей обмоток статора на угол 90 эл. град. При этом в выходной обмотке индуктируется э. д. с., обусловленная трансформаторной связью между обмотками возбуждения и выходной. Эта э. д. с. вносит особенно большие погрешности при малой скорости вращения ротора, когда э. д. с. вращения мала. Для уменьшения влияния магнитной несимметрии обмотки статора соединяют по мостиковой схеме (рис. 4.73), в которой остаточное напряжение уменьшается за счет параллельного присоединения к отдельным плечам обмотки сопротивления R или емкости С. В большинстве случаев одну обмотку статора располагают на внешнем статоре, а другую на внутреннем (рис. 4.74).
После сборки тахогенератора при неподвижном роторе подводят напряжение к обмотке возбуждения и поворачивают внутренний статор в положение, в котором остаточное напряжение является наименьшим. При этом положение статора фиксируют стопорным винтом.
Преимуществом асинхронных тахогенераторой перед тахогенераторами постоянного тока является простота конструкции, отсутствие скользящих контактов, меньшие стоимость и габариты. Отсутствие коллектора позволяет обойтись без защитных фильтров ограничивающих радиопомехи.
Недостатком асинхронных тахогенераторов является наличие фазовой погрешности, большая чувствительность к нагреву и зависимость выходного напряжения от характера нагрузочного сопротивления. Та-хогенераторы, предназначенные для создания ускоряющих и замедляющих сигналов, могут иметь амплитудную погрешность порядка 2÷4%. Тахогенераторы, предназначенные для работы в качестве дифференцирующего звена счетно-решающих устройств, должны иметь амплитудную погрешность, не превышающую 0,1% и фазную — 0,1°. Современные асинхронные тахогенераторы удовлетворяют этим требованиям.
Поворотные трансформаторы. В схемах автоматики, счетно-решающих устройств и следящих систем нашли широкое применение поворотные трансформаторы, у которых статор конструктивно выполнен так же, как и у двухфазных асинхронных двигателей, а ротор отличается тем, что имеет двухфазную обмотку, концы которой выведены на четыре контактных кольца (рис. 4.75). Поворотные трансформаторы предназначаются для получения на выходе напряжения, пропорционального углу поворота ротора, синусу и косинусу этого угла. При помощи поворотных трансформаторов можно производить умножение, деление, сложение, вычитание, возведение в степень и извлечение квадратного корня; можно также решать тригонометрические уравнения, производить алгебраические действия с векторными величинами и преобразовывать координаты.
Первичная обмотка поворотного трансформатора является однофазной, синусоидально распределенной в пространстве. Вторичная обмотка также однофазная. В большинстве случаев первичная обмотка располагается на статоре, но возможно и обратное расположение обмоток. Вращение ротора трансформатора обычно производится через редуктор.
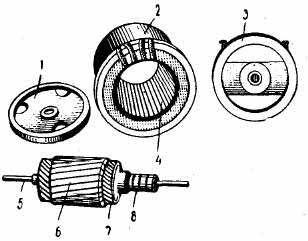 Рис. 4 75. Детали и узлы поворотного трансформатора: 1 и 3 —подшипниковые щиты; 2 — корпус; 4 — сердечник статора; 5 — вал; 6 — сердечник ротора; 7 — обмотка ротора; 8 — контактные кольца
 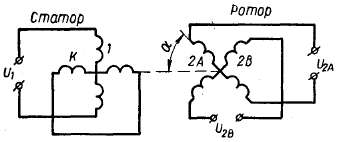
Рис. 4.76. Синусно-косинусный поворотный трансформатор
составляющая Фd направлена по оси первичной обмотки и компенсируется увеличением первичного тока I1. Поперечная составляющая Фq не вызывает увеличения тока I1, а наводит во вторичной обмотке э. д. с. самоиндукции Eq = Фqcosα =Ф2cos2α. Таким образом, в результате прохождения тока по вторичной обмотке в ней индуктируется э. д. с. самоиндукции Eq, пропорциональная квадрату cosα, из-за этого нарушается синусоидальная зависимость напряжения на вторичной обмотке от угла α.
Для компенсации поперечной составляющей Фq на статоре перпендикулярно первичной обмотке располагают короткозамкнутую обмотку K (рис. 4.76). Такой трансформатор сохраняет при нагрузке синусоидальную зависимость вторичного напряжения от угла α. Его называют трансформатором с первичным симметрированием. Подробнре исследование этого вопроса показывает, что полная компенсация потока Фq при первичном симметрировании имеет место лишь в случае, если обмотка К замкнута не накоротко, а на небольшое сопротивление, равное внутреннему сопротивлению источника питания поворотного трансформатора.
Поворотный трансформатор может быть синусным, если вторичная обмотка является обмоткой 2А (рис. 4.76), косинусным, если вторичная обмотка 2В сдвинута на 90°, и синусно-косинусным, если имеются две вторичные обмотки (2A и 2В). В случае, если обе обмотки синусно-косинусного трансформатора имеют одинаковое число витков и нагружены одинаковыми сопротивлениями, то поперечные составляющие Фq потоков обмоток 2А и 2В компенсируют друг друга. Такой трансформатор не нуждается в ком-
пенсационной обмотке К. Его называют трансформатором со вторичным симметрированием. Для повышения точности поворотных трансформаторов необходимо свести к минимуму пространственные и зубцовые гармоники, а также временные гармоники, обусловленные насыщением магнитной цепи.
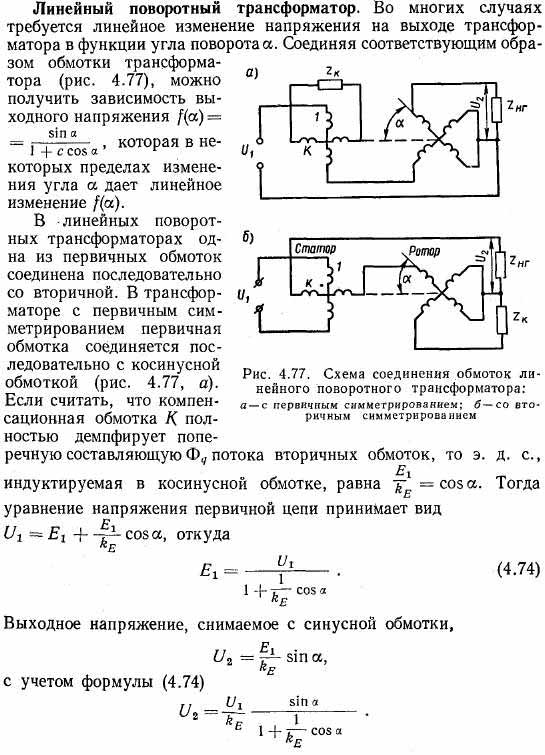
При коэффициенте трансформации kE = 1,78 коэффициент с = 0,56 и выходное напряжение U2 является с точностью до 0,1 % линейной функцией угла α при изменении α от +60 до —60 эл. град. Если при вторичном симметрировании (рис. 4.77, б) сопротивление zk компенсационной обмотки подобрано таким образом, что поперечная составляющая Фq потока полностью компенсируется, то при изменении угла поворота α в некоторых пределах выходное напряжение U2 изменяется также линейно.
Поворотный трансформатор-построитель. Поворотный трансформатор, используемый в счетно-решающих устройствах для определения гипотенузы прямоугольного треугольника по двум заданным катетам, называется построителем. На статоре и на роторе поворотного трансформатора-построителя имеются по две сдвинутые на 90° обмотки (рис. 4.78). К статорным обмоткам 1А и 1B через потенциометры подводятся однофазные напряжения Ua и Ub, пропорциональные катетам треугольника. Обмотки имеют одинаковое число витков, поэтому их м. д. с. пропорциональны катетам, а результирующая м. д. с, определяющая поток в зазоре, пропорциональна гипотенузе треугольника. Магнитная система трансформатора делается ненасыщенной, поэтому поток также пропорционален гипотенузе.
Роторная обмотка 2А включена на прибор UΔ, который обычно градуируется в линейных мерах. Другая роторная обмотка 2В питает обмотку управления ОУ асинхронного исполнительного двигателя ИД, обмотка возбуждения которого присоединена к той же сети, что и статорные обмотки трансформатора-построителя. Исполнительный двигатель ИД поворачивает ротор поворотного трансформатора до тех пор, пока напряжение на обмотке 2В не становится равным нулю. В этом случае поток обмоток статора, пропорциональный гипотенузе, располагается по оси обмотки 2А (так как обмотка 2A расположена перпендикулярно обмотке 2В, на которой напряжение равно нулю), поэтому напряжение на приборе UΔ
определяет значение, соответствующее длине гипотенузы, а угол поворота ротора — ее угол по отношению к катету.
Сельсины. В следящих системах возникает необходимость одновременного поворота или синхронного согласованного вращения двух или нескольких механически не связанных между собой осей
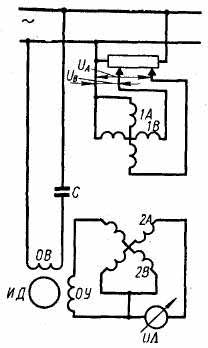 Рис. 4.78. Схема поворотного трансформатора-построителя
механизмов. При этом требуется, чтобы угол θп положения приемной оси и угол θд положения задающей оси были одинаковы, т. е. θп = θд. В действительности это равенство абсолютно точно не соблюдается, и всегда имеет место некоторое рассогласование осей, определяемое углом рассогласования
θ = θп - θд.
Индукционная машина, предназначенная для синхронной передачи угла или для получения напряжения, пропорционального углу рассогласования θ, у которой обмотки якорей создают однофазный пульсирующий поток, называется сельсином.
Сельсины находят широкое применение в следящих системах для синхронной передачи угла, контроля и управления. Они представляют собой поворотные трансформаторы, у которых первичная обмотка является однофазной, а вторичная — трехфазной. Первичные обмотки, присоединенные к сети, называются обмотками возбуждения, а вторичные — обмотками синхронизации. Индукционная система синхронной связи состоит из двух (или нескольких) одинаковых сельсинов, один из которых является датчиком, а другой (или другие) — приемником. Обмотки синхронизации датчика и приемника электрически соединены между собой (рис. 4.79).
Так как поток обмотки возбуждения пульсирует, то в фазах трехфазной обмотки синхронизации индуктируются э. д. с, совпадающие по фазе. При повороте ротора значения э. д. с. в обмотках синхронизации изменяются, но их фаза остается прежней.
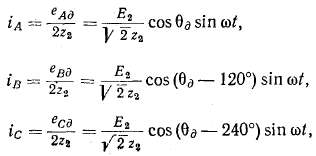
В фазах обмотки синхронизации датчика индуктируются э. д. с.;
 мотки синхронизации, которая имеет место при пространственном совпадении осей обмоток возбуждения и синхронизации.
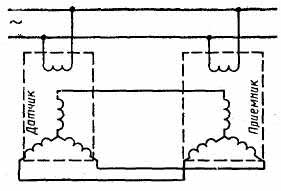 Рис. 4.79. Схема индукционной синхронной связи при индикаторном режиме работы сельсин-приемника
В фазах обмотки синхронизации приемника индуктируются э. д. с:
 Трехфазная обмотка синхронизации может быть расположена на статоре или роторе. В первом случае сельсин имеет только два контактных кольца в цепи обмотки возбуждения, а в цепи обмоток синхронизации отсутствуют скользящие контакты, что делает работу следящей системы более надежной. Однако в этом случае по скользящему контакту обмотки возбуждения, независимо от вращения ротора, проходит ток. Обмотку возбуждения выполняют распределенной или сосредоточенной.
Для демпфирования механических колебаний ротора сельсин-приемник обычно снабжается демпфером. Сельсин-датчик не нуждается в демпфирующем устройстве, так как он связан с механизмом, имеющим большой момент инерции.
В зависимости от величины момента сопротивления исполнительного механизма используется индикаторная (указательная) или трансформаторная схема включения сельсинов.
Работа сельсинов в индикаторной схеме. Если на валу приемника находится легкая сбалансированная стрелка или движок реостата следящей системы, то сельсин-приемник используют для работы в индикаторном режиме, в котором он сам осуществляет вращение стрелки или движка реостата. В схеме индукционной синхронной связи при индикаторном режиме обмотки возбуждения обоих сельсинов присоединяют к одной сети (рис. 4.79). Если угол θ рассогласования между роторами сельсинов равен нулю, то э. д. с. соответствующих фаз обмоток синхронизации равны и направлены встречно, в результате ток по ним не проходит. В этом случае обмотка синхронизации не оказывает влияния на обмотку возбуждения, по которой так же, как и в режиме холостого хода трансформатора, проходит ток, индуктивная составляющая которого является током намагничивания.
В общем случае угол рассогласования θ≠0, и, с учетом выражений (4.75) и (4.76), по фазам обмоток синхронизации проходят токи:
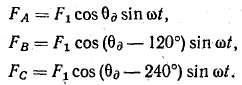
 Магнитодвижущую силу обмотки синхронизации можно разложить на две взаимно перпендикулярные составляющие, одна из которых (Fd) направлена по оси обмотки возбуждения, а другая (Fq) по оси, перпендикулярной к ней:
   Направленная по оси обмотки возбуждения м. д. с. Fd размагничивает обмотку возбуждения, так же как и м. д. с. короткозамкнутой обмотки трансформатора. В результате увеличивается ток Iв обмотки возбуждения, величина которого достигает максимального значения при θ = 180° (рис. 4.80),
Вследствие взаимодействия поперечной составляющей Fq и магнитного потока Фв = Фsin(ωt—ψ) обмотки возбуждения возникает электромагнитный синхронизирующий момент
 Из (4.80) следует, что синхронизирующий момент имеет две составляющие: постоянную и пульсирующую, с двойной частотой
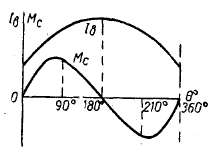 Рис. 4.80. Статические характеристики сельсина
сети, среднее значение которой за период равно нулю. Поэтому среднее значение синхронизирующего момента Мс равно первой (постоянной) составляющей, величина которой пропорциональна синусу угла рассогласования θ.
Вследствие незначительного насыщения магнитной цепи можно с большой степенью точности считать, что значения потока Фв и м. д. с. F1 пропорциональны напряжению питающей сети U1. Тогда среднее значение синхронизирующего момента
 Из формулы (4.81) следует, что синхронизирующий момент пропорционален квадрату напряжения питания. В сельсинах, имеющих явновыраженные полюсы, вследствие неодинаковой проводимости по оси полюса и в междуполюсном пространстве, кривая Мс = f(θ) несколько отличается от синусоидальной зависимости (см. рис. 4.80).
Синхронизирующий момент Мс действует на роторы обоих сельсинов и стремится повернуть их таким образом, чтобы угол рассогласования θ стал бы равным нулю, т. е. встречно. Ротор датчика связан с задающим механизмом, поэтому под влиянием синхронизирующего момента обычно поворачивается лишь ротор приемника. Из выражения (4.80) видим, что при трехфазной обмотке синхронизации синхронизирующий момент зависит только от угла рассогласования θ и не зависит от углов θд и θп, определяющих положение обмоток синхронизации датчика и приемника относительно их обмоток возбуждения.
Момент синхронизации равен нулю при θ = 0, θ = 360° и θ = 180°. При θ = 0 и при θ = 360° роторы датчика и приемника находятся в одинаковом положении. Это положение является устойчивым, так как при любом отклонении от него возникает синхронизирующий момент, старающийся вернуть ротор в прежнее положение. При θ = 180° положение роторов неустойчиво, так как в случае незначительного изменения угла θ появляется синхронизирующий момент, который выводит роторы из этого положения. Таким образом, двухполюсные сельсины синхронизируются в пределах одного оборота. При этом, если угол θ не превысил 180°, синхронизирующая сила возвращает ротор в положение, при котором θ = 0, а если θ > 180°, синхронизирующая сила стремится повернуть ротор в положение, соответствующее θ = 360°.
Часто один сельсин-датчик работает на несколько сельсинов-приемников. Тогда обмотки возбуждения всех сельсинов соединяют параллельно, и все обмотки синхронизации также соединяют параллельно между собой (рис. 4.81). В этом случае синхронизирующий момент сельсина-датчика равен сумме моментов всех сельсинов-приемников.
При работе синхронной передачи угол рассогласования обычно не превышает 10°. При угле порядка 1° появляется момент, в боль-
шинстве случаев достаточный для поворота ротора. При дальнейшем вращении ротора угол θ приблизительно сохраняет свое значение. Таким образом осуществляется синхронная передача.
Работа сельсинов в трансформаторной схеме. Если вращение исполнительного механизма требует специального двигателя, то сельсин-приемник соединяют по трансформаторной схеме, в которой однофазная обмотка сельсина-приемника присоединена не к сети переменного тока, а является выходной обмоткой, с которой сигнал подается через усилитель У на исполнительный двигатель ИД (рис. 4.82). В обмотке синхронизации приемника не индуктируется э. д. с, которая могла бы компенсировать э. д. с, индуктируемую в обмотке синхронизации датчика. Поэтому при любом положении роторов по обмоткам синхронизации проходят токи:
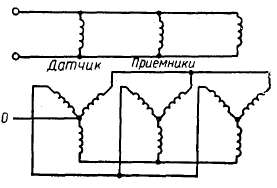 Рис. 4.81. Схема соединения сельсинов при работе двух приемников от одного датчика
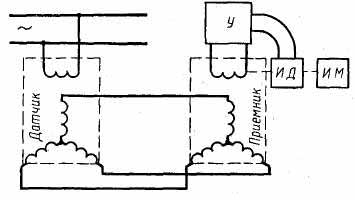 Рис. 4.82. Схема индукционной синхронной связи при трансформаторном режиме работы сельсина-приемника
которые создают. в фазах обмотки синхронизации сельсина-приемника м. д. с:
 Магнитодвижущая сила сельсина-приемника, направленная по оси однофазной выходной обмотки,
 Из формулы (4.82) видим, что составляющая м. д. с. Fd изменяется синусоидально во времени с частотой сети, и величина ее пропорциональна косинусу угла рассогласования роторов θ. В результате изменения во времени м. д. с. Fd на выходной однофазной обмотке приемника индуктируется э. д. с, пропорциональная cosθ. Практически удобно, чтобы при θ = 0 напряжение на выходной обмотке также равнялось бы нулю. Для этого обмотки предварительно сдвигают на 90°. Сигнал с выходной обмотки подается через усилитель У на обмотку управления исполнительного двигателя ИД (рис. 4.82). Вал двигателя ИД жестко связан (иногда через редуктор) с исполнительным механизмом ИМ и ротором приемника. При вращении исполнительного двигателя ротор сельсина приемника поворачивается до тех пор, пока угол рассогласования θ не станет равным нулю.
Дифференциальные сельсины. Часто бывает необходимо, чтобы сельсин-приемник реагировал на несколько сигналов одновременно подаваемых разными датчиками. Для этого в схеме синхронной связи применяют дополнительные дифференциальные сельсины. При их использовании в индикаторной или трансформаторной схеме обмотки синхронизации датчика и приемника соединяют не накоротко, а через дифференциальный сельсин (рис, 4.83). В этом случае угол θп поворота вала приемника равен алгебраической сумме угла θд поворота датчика и угла θдиф поворота дифференциального сельсина.
Дифференциальный сельсин представляет собой индукционную машину, выполненную по типу трехфазного асинхронного двигателях контактными кольцами, обмотки статора и ротора которого являются идентичными. Обмотку, соединенную с датчиком, называют первичной, связанную с приемником — вторичной. Если угол θдиф между осями первичной и вторичной обмоток дифференциального сельсина равен нулю, то угол θд, создаваемый датчиком, полностью определяет угол θп поворота. В этом случае θп = θд.
При повороте ротора дифференциального сельсина поток, создаваемый его первичной обмоткой, поворачивается относительно вторичной на угол θдиф, поэтому э. д. с. в фазах его вторичной обмотки соответствуют суммарному углу поворота θд + θдиф. Эти э. д. с. передаются на обмотку синхронизации сельсина-приемника. В результате его ротор поворачивается на угол θп = θд + θдиф. Угол θдиф может быть положительным или отрицательным по отношению к углу θд. Изменение знака угла θдиф может быть произведено переключением любой пары подводящих проводов обмоток ротора или статора дифференциального сельсина. Иногда дифференциальный сельсин работает по индикаторной схеме как приемник от двух датчиков, которыми являются обычные сельсины.
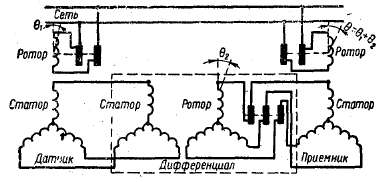 Рис. 4.83. Система индукционной синхронной связи с дифференциальным сельсином при индикаторном режиме работы
Бесконтактные сельсины. В настоящее время получили широкое распространение бесконтактные сельсины. Их обмотки возбуждения 1 и синхронизации 2 (рис. 4.84) расположены на статоре и остаются неподвижными при вращении ротора. При этом отпадает необходимость в скользящих контактах. Ротор 3 представляет собой два скошенных, разобщенных полюса, косой промежуток 4 между которыми заполнен немагнитным материалом, (обычно силумином или пластмассой). Из-за магнитной несимметрии, вызванной немагнитным промежутком, ротор при вращении увлекает с собой магнитный поток. Вследствие этого поток, создаваемый неподвижной обмоткой возбуждения, вращается вместе с ротором.
Обмотку возбуждения бесконтактного сельсина выполняют в виде двух кольцевых катушек. Трехфазная обмотка синхронизации заложена в пазах 9 пакета статора и имеет обычную конструкцию. Магнитная система состоит из правого и левого пакетов ротора, торцовых пакетов 5, основного пакета статора 6 и внешнего магнитопровода 7. Все пакеты магнитопровода набраны из листов электротехнической стали. Магнитопровод находится в алюминиевом корпусе.
Если в данный момент времени направление тока в обмотках возбуждения 1 соответствует показанному на рис. 4.84, а, то поток в роторе проходит справа налево. Проходя в этом направлении, в правой половине ротора поток встречает большое магнитное сопротивление промежутка 4 и, поворачивая вверх, входит через воздушный зазор в основной статор 6. Далее поток проходит за плоскость чертежа рис. 4.84, а (как показано крестиком в кружке). Путь потока в статоре показан стрелками на рис. 4.84, б. Пройдя
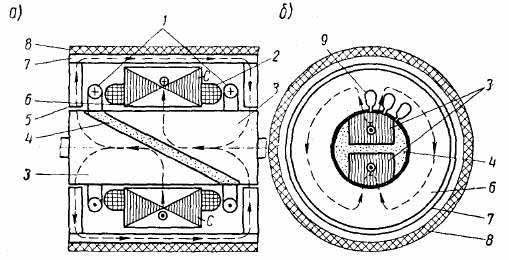 Рис. 4.84. Бесконтактный сельсин: 1 — обмотки возбуждения; 2 — обмотки синхронизации; 3 — ротор; 4 — косой промежуток между полюсами; 5 — торцовые пакеты; 5 — основной статор; 7 — внешний магнитопровод; 8 — алюминиевый корпус; 9 — пазы пакета статора
по окружности статора, поток попадает в нижнюю часть пакета (рис. 4.84, а, точка в кружке). Далее через воздушный зазор поток проходит в левую половину ротора, затем, проходя через воздушный зазор, по торцовому пакету, внешнему магнитопроводу и по правому торцовому пакету поток входит через воздушный зазор в правую половину ротора.
При повороте ротора поворачивается и поток, в результате чего изменяются трансформаторные э. д. с. в фазах обмотки синхронизации.
Отсутствие скользящих контактов повышает точность передачи углов бесконтактными сельсинами и делает их работу более надежной. Из-за наличия четырех воздушных зазоров (вместо двух в обычном сельсине) магнитный поток при той же мощности возбуждения в бесконтактном сельсине значительно уменьшен. Поэтому при равном значении максимального синхронизирующего момента бесконтактные сельсины имеют большие вес и габариты и меньший cosφ.
Магнесины. Магнесины представляют собой бесконтактные сельсины с постоянными магнитами. Они применяются для синхронной передачи вращения на небольшое расстояние, требующей незначи-
тельной мощности. Магнесины (датчик и приемник) имеют одинаковую конструкцию. Статор представляет собой собраний из листов пермаллоя тороид 1 (замкнутое кольцо), на котором равномерно намотана обмотка 2 (рис. 4.85). Обмотки датчика и приемника в точках а присоединены к общей однофазной сети переменного тока. Обмотки имеют отпайки б и в, расположенные под углом 120° относительно друг друга и относительно точек а присоединения к сети. Точки
б и в обоих магнесинов соединены друг с другом соответствующими линиями связи. Точки а обоих магнесинов соединены
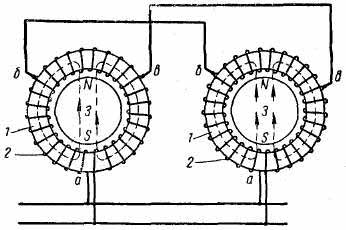 Рис. 4.85. Схема магнесинной системы синхронной связи: 1 — тороид; 2 — обмотка; 3 — ротор
через питающую сеть. В результате уравнительные токи между магнесинами могут проходить через точки а, б и в.
Ротор представляет собой постоянный магнит, имеющий форму цилиндра, который намагничен по диаметру.
В обмотках магнесинов индуктируются э. д. с. самоиндукции, имеющие частоту питающей сети. При любом положении роторов эти э. д. с. не вызывают уравнительных токов, имеющих частоту сети.
Поток, создаваемый обмотками статора, пульсирует с частотой сети. При изменении потока магнитная проницаемость тороида изменяется, реагируя на каждую полуволну. Таким образом, за один период изменения потока магнитная проницаемость дважды достигает максимального и минимального значений.
Поток постоянного магнита ротора замыкается через тороид, поэтому, реагируя на каждое изменение магнитной проницаемости, он пульсирует с двойной частотой сети. В результате в участках обмотки статора индуктируются э. д. с. двойной частоты, значения которых зависят от положения ротора.
Если роторы обоих магнесинов занимают одинаковое положение относительно точек обмотки а, б и в (θ = 0), то в одноименных
участках обмоток индуктируются одинаковые встречно направленные э. д. с. двойной частоты, вследствие чего уравнительный ток по ним не проходит. Если же угол рассогласований θ ≠ 0, то э. д. с. не равны, и по обмоткам проходит уравнительные токи. В результате взаимодействия уравнительных токов двойной частоты с потоком постоянных магнитов ротора возникает электромагнитный синхронизирующий момент, который стремится повернуть ротор таким образом, чтобы угол рассогласования θ стал бы равным нулю. Таким образом, магнесины обладают свойством самосинхронизации в пределах одного оборота.
Достоинствами магнесинов являются отсутствие скользящего контакта, малые вес и габариты. Магнесины могут быть использованы лишь в тех случаях, когда синхронная связь осуществляется при весьма малом моменте сопротивления со стороны исполнительного механизма. Магнесины получили применение в авиации, например для дистанционных компасов.
ВОПРОСЫ
1. Каким образом в неподвижной обмотке статора асинхронного тахогенератора индуктируется э. д. с, пропорциональная скорости вращения ротора? Почему выходная э. д. с. тахогенератора имеет частоту, не пропорциональную скорости вращения ротора, а равную частоте питающей сети? Какими э. д. с. вызываются токи ротора асинхронного тахогенератора? Как располагаются контуры витков ротора, в которых индуктируется э. д. с. трансформации и вращения? С какой целью тахогенераторы присоединяют к сети с повышенной частотой?
2. Чем отличается линейный поворотный трансформатор от синусного? -Каким образом при помощи поворотного трансформатора определяют величину и направление гипотенузы прямоугольного треугольника? Для чего применяется симметрирование обмоток поворотного трансформатора? Чем отличаются друг от друга поворотные трансформаторы с первичным и вторичным симметрированием?
3. В чем состоит различие между индикаторной и трансформаторной схемами работы сельсинов? Какой момент действует на ротор сельсина-датчика в случаях работы приемника в трансформаторной и в индикаторной схемах? В чем состоит отличие конструктивного выполнения дифференциальных сельсинов от обычных? Какую частоту имеют уравнительные токи сельсинов? Какую частоту имеют уравнительные токи магнесинов?
Содержание Главная (библиотека)
Предыдущий § Следущий
| 