|
Содержание Главная (библиотека)
Предыдущий § Следущий
§ 4.8. ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
Общие сведения. Среди исполнительных двигателей, применяемых в системах автоматики, наибольшее распространение получили асинхронные микродвигатели. Основным их достоинством является простота конструкции и надежность в работе.
Основным требованием, предъявляемым к исполнительным двигателям, является линейная зависимость между величиной сигнала
и скоростью вращения. Для предупреждения самохода активное-сопротивление короткозамкнутого ротора выбирается настолько большим, чтобы была исключена возможность вращения двигателя за счет однофазного пульсирующего поля. Иначе после исчезновения сигнала на обмотке управления двигатель продолжал бы вращаться как однофазный.
Благодаря повышенному значению активного сопротивления обмотки ротора критическое скольжение sk больше единицы. В этом случае после снятия сигнала с обмотки управления на ротор действует тормозной момент (см. рис. 4.53, в), вследствие чего время остановки ротора оказывается меньшим, чем при одновременном снятии напряжения с обмоток возбуждения и управления. Обычно у исполнительных двигателей sk = 3÷4. В результате этого создаются благоприятные условия для регулирования скорости вращения, и двигатели устойчиво работают во всем диапазоне скольжений от 0 до 1.
В качестве исполнительного двигателя в некоторых случаях применяется двигатель с обычным короткозамк-нутым ротором типа беличьей клетки, имеющим повышенное сопротивление обмотки ротора. Короткозамкнутая клетка таких двигателей изготовляется из латуни или специальных сплавов. Вследствие повышенного активного сопротивления ротора значительно увеличиваются электрические потери и уменьшается полезная механическая мощность двигателя, поэтому номинальная мощность асинхронных исполнительных двигателей в два-три раза меньше, чем обычных короткозамкнутых двигателей, имеющих те же габариты.
Недостатком исполнительных двигателей с ротором типа беличьей клетки является сравнительно большая электромеханическая постоянная времени.
Двигатели с полым немагнитным ротором. В схемах автоматики наибольшее распространение получили асинхронные двигатели с полым немагнитным ротором, который обычно выполняется из тонкостенного (толщиной 0,2—1,0 мм) алюминиевого стакана 2 (рис. 4.64), прикрепляемого с одной стороны к валу 5. Вследствие легкости тонкого алюминиевого ротора момент инерции двигателя мал, что обеспечивает его быстродействие. В контурах стакана ро-
 Рис. 4.64. Конструкция асинхронного двигателя с полым ротором: 1 — наружный статор; 2 — тонкостенный алюминиевый стакан; 3 — внутренний статор; 4 — обмотка наружного статора; 5 — вал
тора так же, как и в стержнях короткозамкнутой клетки, наводятся токи. В результате их взаимодействия с вращающимся магнитным полем создается электромагнитный момент двигателя. Активное сопротивление r2 полого ротора велико, поэтому обычно критическое скольжение sk = 2÷4. Стакан 2 ротора располагается в воздушном зазоре между шихтованными статорами 1 и 3, выполненными из лакированных листов электротехнической стали. Между стенками ротора и статорами имеются воздушные зазоры размером 0,1÷0,25 мм.
Общая величина одного расчетного зазора складывается из двух воздушных зазоров и толщины стенки стакана немагнитного ротора и обычно составляет 0,5÷1,5 мм.
Наружный статор 1 выполнен так же, как и у обычных конденсаторных двигателей. На нем имеются две обмотки 4, сдвинутые в пространстве под углом 90 эл.град. Внутренний статор 5 служит для уменьшения магнитного сопротивления пути потока, проходящего через воздушный зазор. У двигателей некоторых типов на внутреннем статоре имеются пазы, в которых располагается одна или две статорные обмотки.
Магнитный поток из статора 1 проходит через воздушный зазор, стакан 2, второй воздушный зазор и далее, по внутреннему статору 3 через воздушный зазор и полый стакан ротора, возвращается в статор 1. Вследствие большого воздушного зазора двигатель имеет повышенное значение тока холостого хода, доходящее до 90% от номинального, что снижает к. п. д. и является существенным недостатком. При отсутствии конденсатора cosφ = 0,4÷0,5. Поэтому в тех случаях, когда двигатель соединен с механизмами, имеющими большую инерцию, целесообразнее использовать асинхронный двигатель обычного типа с повышенным сопротивлением ротора, который имеет меньшие ток и габариты.
Индуктивное сопротивление х2 двигателя с немагнитным ротором весьма мало. Это благоприятно сказывается на механических и регулировочных характеристиках. Практически сопротивлением ротора х2 можно пренебречь и считать, что хk = х1. Таким образом, сопротивление короткого замыкания хk двигателя с полым ротором уменьшается примерно вдвое по сравнению с двигателем, имеющим обмотку ротора типа беличьей клетки. Это позволяет при сохранении того же значения критического скольжения, что и в двигателе обычного исполнения, уменьшить вдвое r2, в результате к. п. д. двигателя увеличивается, но остается все-таки низким, порядка 20÷40%. Это объясняется большими потерями в статоре от намагничивающего тока.
Двигатели с полым стальным ротором. В некоторых случаях применяют полый стальной ротор, по которому замыкается магнитный поток. Такой двигатель не имеет внутреннего статора. Поэтому воздушный зазор остается таким же, как в двигателе с ротором обычного типа. Проникновение электромагнитного поля
в глубь ротора невелико, вследствие чего сопротивление r2 ротора оказывается значительным, и характеристики двигателя приближаются к линейным. По сравнению с двигателем с немагнитным ротором двигатель с полым стальным ротором имеет больший момент инерции и меньший пусковой момент, что значительно снижает его быстродействие.
Иногда поверхность полого стального ротора покрывают слоем меди толщиной 0,05÷0,1 мм. В этом случае к контурам по стали ротора добавляются контуры по медному покрытию, в результате чего активное сопротивление ротора уменьшается, а мощность и момент увеличиваются. При неравномерном воздушном зазоре двигатели с полым стальным ротором испытывают одностороннее магнитное притяжение, при котором может иметь место прилипание ротора. Двигатели с полым немагнитным ротором свободны от этого недостатка.
Асинхронные двигатели с полым ротором изготовляются для мощностей от долей ватта до нескольких сотен ватт. Двигатели с полым стальным ротором имеют меньшее распространение, чем двигатели с полым немагнитным ротором.
Способы управления. Исполнительные двигатели на статоре имеют две отдельные обмотки, сдвинутые в пространстве под углом 90 эл. град. Одна из них (обмотка 05, рис. 4.65) постоянно присоединена к напряжению сети. Ее называют обмоткой возбуждения. На другую обмотку (ОУ) подается сигнал управления, величина или фаза которого определяют скорость вращения двигателя. Ее называют обмоткой управления.
Для изменения скорости вращения асинхронного исполнительного двигателя изменяют степень эллиптичности магнитного поля от кругового до пульсирующего. При максимальном значении сигнала на обмотке управления (α = 1) поле круговое. По мере уменьшения сигнала поле приобретает более эллиптический характер. При α = 0 поле становится пульсирующим. Управление исполнительным двигателем может осуществляться изменением напряжения на обмотке управления по амплитуде, по фазе или же по фазе и амплитуде. Первый способ управления называют амплитудным, второй — фазовым, третий — амплитудно-фазовым.
При амплитудном управлении напряжение на обмотке управления всегда сдвинуто на четверть периода относительно напряжения на обмотке возбуждения (рис. 4.65, а). Регулирование производится изменением амплитуды напряжения на обмотке ОУ. Круговое поле имеет место при номинальном сигнале на обмотке управления (α = 1) независимо от скорости вращения двигателя. При уменьшении значения сигнала а поле становится эллиптическим.
При фазовом управлении амплитуда напряжения на обмотке управления сохраняется неизменной, но изменяется его
фаза (рис. 4.65, б). Независимо от скорости вращения двигателя круговое поле имеет место при номинальном сигнале на обмотке управления, когда напряжение на обмотках сдвинуто на четверть периода. При изменении фазы напряжения на обмотке управления поле становится эллиптическим. Величина сигнала α оценивается синусом угла сдвига фазы напряжения на обмотках. При α = 0 напряжение на обмотках управления и возбуждения находится в фазе, и поле становится пульсирующим.
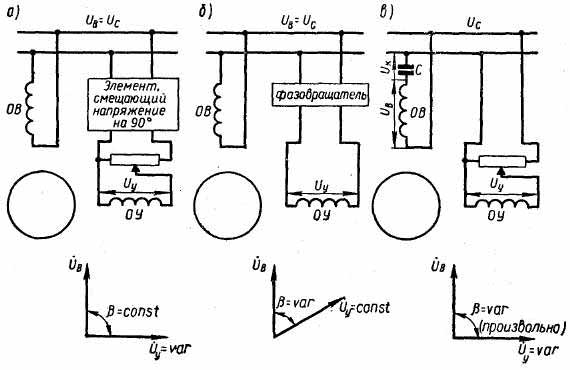 Рис. 4.65. Схемы и векторные диаграммы напряжений асинхронных исполнительных двигателей: а — с амплитудным управлением; б — с фазовым управлением; в — с амплитудно-фазовым управлением (конденсаторная схема)
При амплитудно-фазовом управлении сдвиг тока обычно осуществляется введением конденсатора в цепь обмотки возбуждения (рис. 4.65, в). Конденсаторный способ питания как наиболее простой и эффективный получил наибольшее распространение. Регулирование двигателя осуществляется изменением напряжения на обмотке управления. При этом в результате электромагнитного взаимодействия контуров вращающегося двигателя изменяются величина и фаза напряжения на обмотке возбуждения. Круговое поле имеет место только при одном режиме. Обычно параметры схемы подбираются так, чтобы магнитное поле двигателя было круговым в момент пуска при номинальном сигнале управления (α = 1). При вращении двигателя поле становится эллиптическим независимо от значения сигнала управления. Образующееся при этом обратное
поле создает тормозной момент и снижает к. п. д., но зато регулировочные свойства двигателя оказываются хорошими.
В некоторых случаях включают конденсатор не только в цепь возбуждения, но и в цепь обмотки управления. Вследствие компенсации индуктивности ток обмотки управления уменьшается, что весьма желательно, так как мощность питающих схему усилителей ограничена. При такой схеме питания механические характеристики двига-
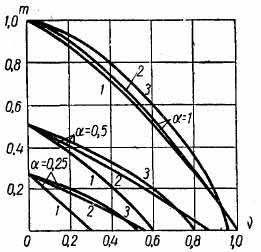 Рис. 4.66 Механические характеристики исполнительного асинхронного двигателя с полым немагнитным ротором
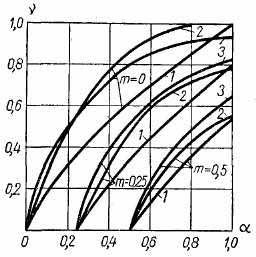 Рис. 4.67 Регулировочные характеристики исполнительного асинхронного двигателя с полым немагнитным ротором
теля становятся более устойчивыми, и его полезная мощность увеличивается.
Характеристики и постоянные времени. Характеристики асинхронных исполнительных двигателей обычно выражают в относительных единицах. Коэффициент сигнала α, относительные момент т и скорость вращения υ имеют тот же смысл, что и у исполнительных двигателей постоянного тока. При фазовом регулировании под коэффициентом сигнала а следует понимать синус угла сдвига между напряжениями на обмотках возбуждения и управления.
Механические характеристики двигателя с фазовым управлением (рис. 4.66, кривая 1) более линейны, чем характеристики двигателя с амплитудным (кривая 2) и с амплитудно-фазовым (кривая 3) управлением. Характеристики двигателя с фазовым управлением имеют одинаковую жесткость при разных значениях коэффициента сигнала α (на рис. 4.66 они располагаются почти параллельно). Характеристики 3 при амплитудно-фазовом управлении в большей степени, чем другие, отличаются от линейных.
Регулировочные характеристики двигателя с фазовым управлением (рис. 4.67, кривые 1) также более линейны, чем характеристики при амплитудном (кривые 2) и амплитудно-фазовом (кривые 3)
управлении. При малых относительных скоростях вращения v все регулировочные характеристики имеют более линейный характер. Поэтому, для того чтобы рабочий участок характеристики был более линейным, необходимо повысить частоту питающей сети, что при-
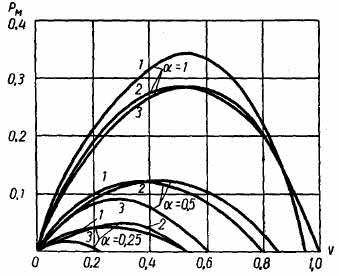 Рис. 4.68. Зависимость полной механической мощности асинхронного исполнительного двигателя с полым ротором от скорости вращения
водит к увеличению n0 и к уменьшению υ. Однако при этом уменьшается коэффициент сигнала α, что увеличивает эллиптичность поля и снижает к. п. д. двигателя.
При уменьшении коэффициента сигнала α максимальное значение полной механической мощности Р2 уменьшается (рис. 4.68). При больших значениях коэффициента сигнала α наибольшая механическая мощность имеет место при амплитудно-фазовом управлении (кривая 1) по сравнению с амплитудным (кривая 2) и с фазовым (кривая 5) управлением.
Из сравнения механических характеристик асинхронного исполнительного двигателя при разных значениях активного сопротивления обмотки ротора (рис. 4.69) следует, что при уменьшении активного сопротивления r2 механическая характеристика в большей степени отклоняется от линейной
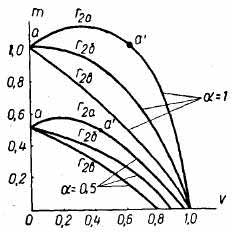 Рис. 4.69. Механические характеристики исполнительного асинхронного двигателя при амплитудном управлении, r2a < r2б < r2в
зависимости. При малом значении r2 может появиться область неустойчивой работы, что имеет место при сопротивлении r2a (область а — а'). Кроме того, можно заметить, что в случае α = 0,5 при уменьшении активного сопротивления r2 увеличивается максимальная теоретически возможная скорость вращения (скорость υ при т = 0). Это справедливо для всех значений α, за исключением α = 1, когда максимальная теоретически возможная скорость равна синхронной.
Электромеханическая постоянная времени асинхронного исполнительного двигателя
 где Мп — пусковой момент двигателя при круговом вращающемся поле (α = 1).
Электромеханическая постоянная времени Тм уменьшается с уменьшением частоты питающей сети и с увеличением числа полюсов двигателя. Электромеханическая постоянная времени исполнительных двигателей мощностью до 15÷20 вm при частоте питающей сети f = 400÷500 гц и круговом поле имеет следующие значения: для двигателей с полым немагнитным ротором Тм = 0,02÷0,15 сек; для двигателей с короткозамкнутым ротором обычного типа Тм = 0,3÷1,5 сек; для двигателей с полым стальным ротором Тм = 1,5÷3 сек. Таким образом, наибольшим быстродействием обладает двигатель с полым немагнитным ротором.
Сравнение исполнительных двигателей постоянного тока и асинхронных. По сравнению с исполнительными двигателями постоянного тока регулируемые асинхронные двигатели имеют меньшую стоимость и более надежны. Кроме того, вследствие отсутствия скользящего контакта между щетками и коллектором они не нуждаются в защитных фильтрах от радиопомех и герметизации во взрывобезопасных помещениях. Однако характеристики асинхронных исполнительных двигателей хуже, чем у двигателей постоянного тока с якорным управлением. Для сравнения на рис. 2.69 и 2.70 тонкими пунктирными линиями представлены характеристики асинхронных исполнительных двигателей.
Характеристики современных асинхронных исполнительных двигателей удовлетворяют требованиям автоматики и, поскольку такие двигатели дешевы и надежны в работе, они получили преимущественное распространение. Их недостатками по сравнению с исполнительными двигателями постоянного тока являются большие габариты и меньший к. п. д.
ВОПРОСЫ
1. В чем состоят особенности регулируемого исполнительного двигателя по сравнению с обычным асинхронным двигателем? Почему асинхронные двигатели обычного типа при пульсирующем одноосном потоке продолжают
вращаться, а исполнительные двигатели останавливаются? При каком значении критического скольжения отсутствует самоход двигателя?
2. Каким образом осуществляется изменение скорости вращения исполнительных двигателей? Как влияет активное сопротивление ротора на характеристики исполнительного двигателя? Какое влияние на работу двигателя оказывает обратно-синхронное поле? Какие преимущества и недостатки имеет двигатель с полым немагнитным ротором?
Содержание Главная (библиотека)
Предыдущий § Следущий
| 