|
Содержание Главная (библиотека)
Предыдущий § Следущий
Глава V
СИНХРОННЫЕ МАШИНЫ И ОДНОЯКОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
5.1. ОБЩИЕ СВЕДЕНИЯ О СИНХРОННЫХ МАШИНАХ
Определение, принцип действия, устройство. Бесколлекторные-машины переменного тока, у которых преобразование энергии происходит вследствие механического перемещения постоянного-магнитного потока полюсов относительно обмотки якоря, называются синхронными. Синхронные машины отличаются от машин постоянного тока тем, что у них
отсутствует коллектор, а обмотка якоря имеет выводные концы, которые присоединяются к сети переменного тока. Обмотка якоря (в большинстве случаев трех- или двухфазная) создает вращающееся поле, которое взаимодействует с полем полюсов, в результате чего возникает электромагнитная; сила, которая стремится ориентировать ротор таким образом, чтобы поля полюсов ротора и якоря были
направлены согласно. Вследствие этого независимо от величины нагрузки поля, создаваемого якорной обмоткой неподвижного статора, и полюса ротора вращаются с одинаковой скоростью в одном направлении, т. в. синхронно. Отсюда и название машин — синхронные. Скорость вращения п ротора строго соответствует частоте сети f1. Согласно формуле (4.1),
 Относительное перемещение потока полюсов может осуществляться при неподвижном якоре и вращающихся полюсах или при вращающемся якоре и неподвижных полюсах. В большинстве случаев применяется первый способ. Синхронные машины, у которых перемещение потока полюсов относительно
якоря осуществляется по второму способу, называются обращенными. Если в машине постоянного тока точки обмотки якоря соединить не с коллектором, а с контактными кольцами, получится обращенная синхронная машина переменного тока. В машине обычного исполнения обмотку якоря (рис. 5.1) располагают на статоре, а полюсы помещают на вращающемся роторе. Обмотку возбуждения питают
постоянным током через щетки и контактные кольца.
Часто ротор синхронной машины делают явнополюсным: (рис. 5.1, а); при этом воздушный зазор в направлении оси полюса
значительно меньше, чем между полюсами. Полюсы ротора обычно представляют собой пакет, набранный из штампованных листов электротехнической стали; на полюсах помещается обмотка возбуждения (рис. 5.1, а). Генераторы, приводимые во вращение тихо-
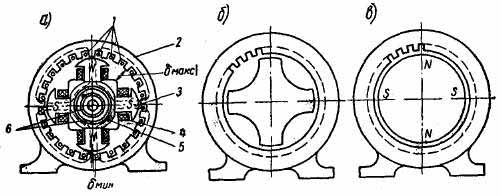 Рис. 5.1. Конструктивная схема синхронной машины (2р=4): а — двигатель с возбуждением от постоянного тока; б — реактивный двигатель; в — двигатель с постоянными магнитами; 1 — обмотка якоря; 2 — статор; 3 — полюсы; 4 — обмотка
возбуждения; 5 — щетки; 6 — контактные кольца
ходными гидравлическими турбинами, всегда имеют явнополюсный ротор; они называются гидрогенераторами. Синхронные двигатели и компенсаторы, скорость вращения которых не пре-
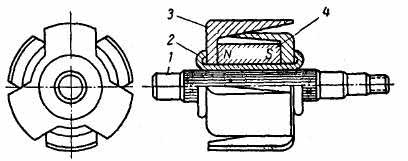 Рис. 5.2. Ротор с «когтеобразными» полюсами: 1 — вал; 2 — немагнитная втулка; 3 — полюс; 4 —цилиндрический постоянный магнит
вышает 1500 об/мин, также выполняются явнополюсными. Ротор двигателей с постоянными магнитами и некоторых других типов двигателей не имеет обмотки возбуждения (рис. 5.1, б).
В двигателях, использующих явление гистерезиса, и в некоторых генераторах с постоянными магнитами ротор имеет неявнополюсное исполнение (рис. 5.1, в); при этом величина воздушного зазора одинакова по всей окружности расточки статора. Иногда генераторы с постоянными магнитами имеют ротор с когтеобразными полюсами (рис. 5.2).
Генераторы с постоянными
магнитами изготовляются мощностью от десятков до нескольких сотен ватт.
Ротор быстроходных мощных синхронных машин на 3000 об/мин выполняется неявнополюсным. Он вытачивается из массивной стальной поковки и имеет вид цилиндра, в котором выфрезерованы пазы для размещения в них обмотки возбуждения (рис. 5.3). Синхронные генераторы, приводимые во вращение быстроходными паровыми турбинами, называются
турбогенераторами.
Конструктивное устройство синхронных микродвигателей такое же, как и асинхронных, за исключением ротора, который имеет свои особенности.
Области применения. Все промышленные генераторы переменного тока являются синхронными. В звукозаписи и во многих других областях техники к электродвигателям малой мощности предъявляются требования постоянства скорости вращения. В этих случаях удобно применять синхронные микродвигатели, которые обеспечивают постоянную скорость вращения
при колебаниях напряжения сети и нагрузки на валу. В счетно-решающих машинах, в системах автоматики и в ракетной технике нашли широкое применение шаговые микродвигатели с дискретным вращением вала.
В настоящее время синхронные машины широко используются в качестве двигателей самых различных мощностей. Это связано с улучшением их пусковых характеристик и с применением компаундирования. Важным преимуществом синхронных двигателей по сравнению с асинхронными является способность поддерживать напряжение сети при его колебаниях.
Синхронные двигатели, имеющие возбуждение, не потребляют из сети реактивной мощности, а могут отдавать ее в сеть, т. е. работать при опережающем токе. Некоторые типы синхронных двигателей выполняются с самовозбуждением через селеновые выпрямители. Коэффициент полезного действия синхронных двигателей на 1—2% выше, чем асинхронных. Синхронные машины используются также в
качестве компенсаторов реактивной мощности, которые работают вхолостую при опережающем токе.
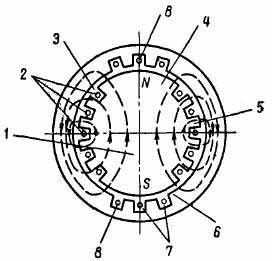 Рис. 5.3. Схема поперечного разреза турбогенератора: 1 — ротор; 2 — витки возбуждения; 3 — пазы, в которых размещается обмотка возбуждения; 4 — большой зуб ротора; 5 — зубцы ротора; 6 — статор; 7 — пазы статора; 8 — обмотка
статора
Выпускаемые электропромышленностью синхронные машины имеют диапазон мощностей — от самых маленьких до самых крупных. В диапазоне мощностей от долей ватта до нескольких десятков ватт наименьшие размеры имеют гистерезисные двигатели, получившие в последние годы широкое распространение.
Содержание Главная (библиотека)
Предыдущий § Следущий
| 