|
Содержание Главная (библиотека)
Предыдущий § Следущий
3-20. Регулирование скорости вращения
Асинхронные двигатели обычно применяются для электроприводов, которые работают с постоянной скоростью вращения. Но иногда они применяются для регулируемых электроприводов. Рассмотрим возможные способы регулирования скорости вращения.
1. На практике иногда для регулирования скорости вращения асинхронного двигателя используется реостат в цепи ротора, имеющего обмотку, присоединенную к контактным кольцам.
Увеличение активного сопротивления цепи ротора приводит к увеличению скольжения и, следовательно, к уменьшению скорости вращения двигателя, что видно из кривых M = f(s) при различных (r'2 + r'д), представлен-
 Для целей регулирования не следует применять пусковые реостаты, так как они предназначаются для кратковременной нагрузки. Регулировочные реостаты должны иметь большие размеры, чтобы получилась достаточная поверхность охлаждения
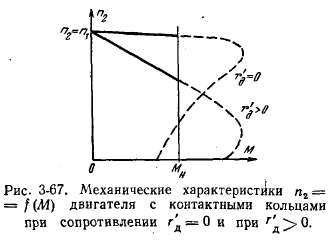 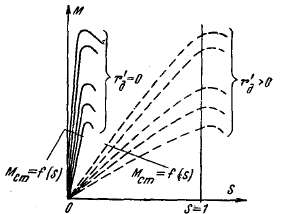 Рис. 3-68. Регулирование скорости вращения путем изменения напряжения U1.
ветствующее переключение обмотки производится сравнительно просто, если нужно увеличить или уменьшить число пар полюсов вдвое. В этом случае каждая фаза обмотки статора делится на две одинаковые части, которые можно включать последовательно или параллельно.
На рис. 3-69 показана принципиальная схема такой обмотки, из которой видно, что при последовательном соединении обеих половин фазы получается число полюсов, в 2 раза большее, чем при параллельном.
При обмотке статора, переключаемой на различные числа пар полюсов, как правило, применяется короткозамкнутый ротор с беличьей клеткой. Если ротор выполняется с контактными кольцами, то его обмотка также должна переключаться на те же числа пар полюсов, что требует устройства большого количества контактных колец и удорожает двигатель.
Для получения большего числа ступеней скорости на статоре помещают обычно две обмотки, причем одна или каждая из них делается переключаемой на числа пар полюсов в отношении 2:1. В этом случае можно получить три или четыре ступени скорости, например:
3000:1500:1000
или
3 000:1500:1000:500 об/мин.
Асинхронные двигатели с несколькими ступениями скорости вращения называются многоскоростными. Они применяются в электроприводах к вентиляторам и металлорежущим станкам, где позволяют упростить «коробку скоростей» или совсем от нее освободиться. Достоинством многоскоростного двигателя при применении его, например, для токарного станка является то, что при изменении момента нагрузки он работает на каждой ступени скорости вращения при незна-
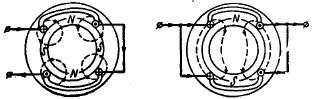 Рис. 3-69. Изменение числа пар полюсов обмотки статора в отношении 2:1.
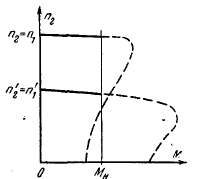 Рис. 3-70. Механические характеристики n2'= f (M) многоскоростного двигателя для двух ступеней скорости.
чительном ее изменении, как и обычный асинхронный двигатель.
Сказанное подтверждают механические характеристики n2 = f(M) многоскоростного двигателя, приведенные на рис. 3-70. К недостаткам многоскоростных двигателей нужно отнести их увеличенные размеры по сравнению с нормальными двигателями и вследствие этого более высокую стоимость
Другие способы регулирования скорости вращения асинхронного двигателя здесь не рассматриваются, так как-они редко применяются на практике.
Содержание Главная (библиотека)
Предыдущий § Следущий
| 