|
Содержание
Предыдущий § Следующий
Глава сорок третья ОДНОФАЗНЫЕ КОЛЛЕКТОРНЫЕ ДВИГАТЕЛИ
§ 43-1. Однофазные двигатели с последовательным возбуждением
Принцип действия и свойства двигателя.
Однофазные двигатели с последовательным возбуждением имеют такое же устройство и схему соединения обмоток (рис. 43-1), как и двигатели с последовательным возбуждением постоянного тока, однако во избежание больших потерь на вихревые токи сердечник статора однофазного двигателя с последовательным возбуждением собирается из листов электротехнической стали, изолированных друг от друга.
В рассматриваемом двигателе поток полюсов Ф » ток якоря i являются переменными, совпадают по фазе (рис. 43-2) и меняют свой знак одновременно. Поэтому знак вращающего момента М не меняется и момент действует в неизменном направлении, но пульсирует с двойной частотой тока. Так как ротор двигателя обладает значительной механической инерцией, то скорость его вращения практически
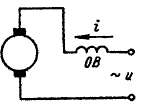 Рис. 43-1. Схема однофазного коллекторного двигателя с последовательным возбуждением
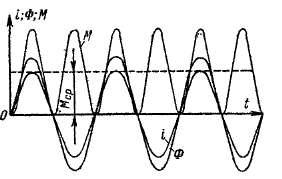 Рис. 43г2. Кривые тока, потока и момента
однофазного коллекторного двигателя
с последовательным возбуждением
постоянна и можно сказать, что двигатель реагирует только на среднюю величину вращающего момента Мср.
Ввиду потерь в стали и наличия короткозамкнутых (коммутируемых) витков обмотки якоря поток Ф и ток I двигателя с последовательным возбуждением в действительности сдвинуты по фазе на, весьма небольшой угол а и на протяжении этого угла момент М имеет другой Знак. Это приводит к небольшому уменьшению Мср, что не имеет существенного значения. В случае параллельного включения якоря и обмотки возбуждения их токи в общем случае будут сдвинуты на значительный угол а, что вызовет значительное уменьшение Мср. Поэтому однофазные двигатели с параллельным возбуждением почти не нашли практического применения.
Обмотка якоря однофазного двигателя с последовательным возбуждением обладает определенным индуктивным сопротивлением ха, обусловленным потоком якоря и потоками рассеяния обмотки якоря. Обмотка возбуждения также обладает определенным индуктивным сопротивлением жв. Индуктивное сопротивление двигателя х = ха + хв и активное сопротивление г— га + rs обусловливают падения напряжения jxl и Н,
Уравнение напряжения двигателя с последовательным возбуждением постоянного тока имеет вид
£/ = £+/7,
а для двигателя с последовательным возбуждением переменного тока соответственно
O=E + rt + }xl, (43-1)
где Ё — э. д. с. якоря, которая индуктируется в результате вращения якоря в магнитном поле полюсов и совпадает по фазе с потоком Ф.
В соответствии с равенством (43-1) векторная диаграмма двигателя изображена на рис. 43-3. Очевидно, что наличие индуктивного сопротивления х вызывает сдвиг фаз ф между напряжением О и током двигателя /. ОбьЛно cos ф «0,70 -*■ 0,95, причем cos ф тем больше, чем больше скорость вращения двигателя.
Механические п = f (M) и скоростные п — f (I) характеристики двигателей с последовательным возбуждением переменного и постоянного тока (см. § 10-5) имеют одинаковый характер, т. е. с увеличением нагрузки скорость вращения этих двигателей сильно уменьшается.
Коммутация. В коммутируемых секциях обмотки якоря однофазного двигателя индуктируется реактивная э. д. с. ер и трансформаторная э. д. с. втр. Реактивная э. д.с. обусловлена изменением тока в коммутируемых секциях, пропорциональна скорости вращения п и току якоря I и совпадает по фазе с этим током.
Трансформаторная э. д. с. индуктируется вследствие изменения потока полюсов с изменением частоты тока сети, пропорциональна этой частоте и потоку полюсов Ф или току Ли сдвинута по фазе относительно потока на 90°. Э. д. с. етр, как и в многофазных коллекторных машинах переменного тока, существенно ухудшает условля коммутации однофазных двигателей с последовательным возбуждением по сравнению с двигателями достоянного тока.
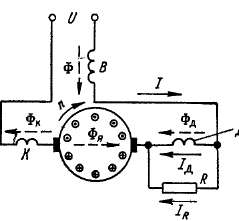
Маломощные (Ра s£ 0,5 кет) двигатели с последовательным возбуждением строятся без добавочных полюсов, и для улучшения их коммутации можно сдвигать щетки с геометрической нейтрали против* йращения якоря. Мощные двигатели с последовательным возбуждением изготовляются с добавочными полюсами и компенсационной обмоткой на статоре. Все обмотки двигателя включаются последовательно (рис. 43-4). Компенсационная обмотка, как и в двигателях постоянного тока, предназначена для компенсации потока реакции якоря. Применение этой обмотки уменьшает индуктивное сопротивление двигателя, повышает его коэффициент мощности и улучшает условия коммутации.
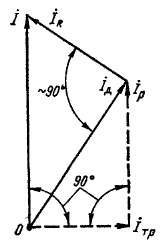
Э. д. с. ер и етр сдвинуты по фазе на 90°, и э. д. с. етр не зависит от скорости вращения. Эти обстоятельства затрудняют компенсацию, э. д. с. етр с помощью добавочных полюсов. Шунтирование обмотки добавочных полюсов активным сопротивлением R (рис. 43-4) позволяет достичь полной компенсации етр при определенной скорости вращения. В этом случае (рис. 43-4 и 43-5)
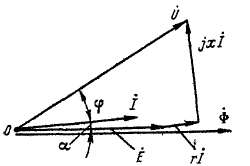 Рис. 43-3. Векторная диаграмма однофазного коллекторного двигателя с последовательным воабужде-нием

и так как индуктивное сопротивление обмотки добавочных полюсов значительно больше ее активного сопротивления, то /д и tR сдвинуты по фазе почти на 90° и ток добавочных полюсов /д отстает от тока двигателя /. Ток /д в свою очередь можно разложить на две составляющие /D и /тр (рис 43-5), причем /р совпадает по фазе с током /, а /тР отстает от него на 90°. Потоки добавочных полюсов, создаваемые токами /р и /тр, будут индуктировать в коммутируемых секциях э. д. с, направленные соответственно против э. д. с. ер и етр. Поэтому при надлежащем выборе числа витков обмотки добавочных полюсов и величины сопротивления R можно достичь полной компенсации э. д с. ер и етр и хороших условий коммутации при определенной скорости вращения п. Но поскольку 9. д. с. етр пропорциональна
Рис. 43-4. Схема однофазного коллекторного двигателя с последовательным возбуждением с компенсационной обмоткой и добавочными полюсами
В — обмотка возбуждения; К — компенсационная обмотка; Д — обмотна добавочных полюсов; R — активное сопротивление
Рис. 43-5. Векторная диаграмма обмотки добавочных полюсов, шунтированной активным сопротивлением
f, а э. д. с, индуктируемая током /тр в коммутируемой секции, пропорциональна п, то при других значениях л компенсация етр нарушается и условия коммутации ухудшаются.
Принимаются также другие меры для улучшения коммутации однофазных двигателей с последовательным возбуждением, но в целом качество коммутации этих двигателей значительно хуже, чем у машин постоянного тока.
Применение однофазных двигателей с последовательным возбуждением. Маломощные однофазные двигатели с последовательным возбуждением (Рн =g s£ 0,5 кет) находят широкое применение в иромышленных и бытовых устройствах, когда требуются большие скорости вращения (я = 3000 -4- 30000 об/мин) или регулирование скорости вращения (шлифовальные станки, ручной металлообрабатывающий инструмент, телеграфные аппараты, пылесосы, полотеры, швейные машины и др.). При необходимости регулирование скорости этих двигателей производится так же, как и у двигателей с последовательным возбуждением постоянного тока (регулирование величины питающего напряжения, например, с помощью автотрансформатора, шунтирование обмотки возбуждения или якоря). Вид магнитной системы таких двигателей показан на рис. 43-6, а. Эти двигатели обычно пускаются в ход путем непосредственного включения на полное Спряжение сети.
Маломощные двигатели с последовательным возбуждением часто изготовляются для питания как от сети переменного, гак и от сети постоянного тока, и в этом случае их называют универсальными двигателями с последовательным возбуждением. При питании постоянным током индуктивное падение напряжения в двигателе отсутствует, и поэтому при одинаковых питающих напряжениях
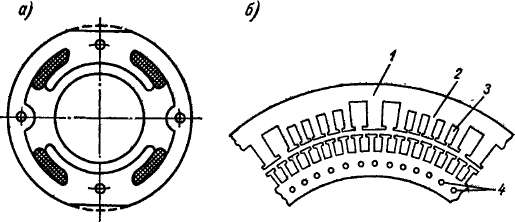 Рис. 43-6. Магнитные системы маломощных (а) и мощных (б) двигателей с последовательным возбуждением
I — дополнительный полюс; 2 — главный полюс; 3 — пазы компенсационной обмотки; 4 — вентиляционные каналы
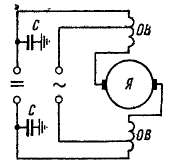
и нагрузках на валу скорость вращения при постоянном токе будет значительно больше, чем при переменном. Поэтому для получения приблизительно одинаковых механических характеристик при питании от сети постоянного и переменного тока обмотка возбуждения универсального двигателя изготовляется с отводами и при переменном то,ке часть обмотки возбуждения отключается (рис. 43-7). На рис. 43-7 показано также включение конденсаторов для уменьшения радиопомех. В этом случае обмотка возбуждения разбивается на две части, которые присоединяются с разных сторон якоря. Конденсаторы включаются между выводными зажимами и корпусом, который заземляется.
Мощные однофазные двигатели (до Ря = = 300 -S- 1000 кет) находят применение главным образом в качестве тяговых двигателей электровозов переменного тока (рис. 43-6, б). Такие электровозы используются на электрифицированных железных дорогах ряда зарубежных стран. При этом контактная сеть имеет высокое напряжение (15000—25000 в) и на электровозе устанавливается понижающий трансформатор с регулируемым вторичным напряжением для регулирования скорости вращения тяговых двигателей. Для уменьшения
трансформаторной э. д. с. и улучшения условий коммутации тяговых двигателей такие железные дороги, как правило, электрифицированы на переменном токе пониженной частоты (f — 16 гц, иногда / = 25 гц).
Трудные условия коммутации двигателей с последовательным возбуждением переменного тока обусловили во многих странах, в частности в СССР, широкое развитие электрификации железных дорог на постоянном гоке с напряжением в контактной сети 1500—3000 в. Однако при относительно малом напряжении
Рис. 43-7. Принципиальная схема универсального коллекторного двигателя
контактной сети получается большое сечение проводников контактных сетей и малое расстояние между питающими подстанциями, что вызывает значшельное удорожание электрификации железных дорог. Поэтому в последние годы на вновь электрифицируемых железных дорогах контактная сеть обычно питается переменным током нормальной промышленной частоты высокого напряжения (25—30 кв), а на электровозах устанавливаются трансформаторы, ртутные или полупроводниковые выпрямители и тяговые двигатели постоянного тока Эти двигатели питаются в действительности пульсирующим током, так как при выпрямлении однофазного тока постоянный ток содержит значительную переменную составляющую двойной частоты. Эта составляющая тока также затрудняет коммутацию тяговых двигав телей, однако применение различных мер (шунтирование обмотки возбуждения активным сопротивлением или емкостью, шихтованные сердечники добавочных полюсов, полностью или частично шихтованное ярмо статора) позволяет получить вполне удовлетворительную коммутацию (шунтирование обмотки возбуждения разгружает обмотку от переменной составляющей тока и сводит величину трансформаторной э. д. с. практически до нуля) [31].
§ 43-2. Репульсионные двигатели
Репульсионными называются однофазные коллекторные двигатели, в которых обмотка ротора (якоря) не имеет электрической связи со статором и питающей сетью. Щетки этих двигателей замкнуты накорбтко, и передача электрической энергии ротору происходит только трансформаторным путем через магнитное поле. Регулирование скорости вращения этих двигателей осуществляется путем поворота щеток, а их пуск производится путем прямого включения на полное напряжение сети. Простота пуска и регулирования скорости обусловил^ определенное распространение репульсионных двигателей небольшой мощности (до Рн = 20 -г-30 Квт).
На рис» 43-8, а представлена схема репульсионного двигателя с двумя о'Змоткзми на статоре (двигатель Аткинсона). Поток Фв обмотки В индуктирует в обмотке якоря только э. д. с. вращения, пропорциональную по величине скорости враще-
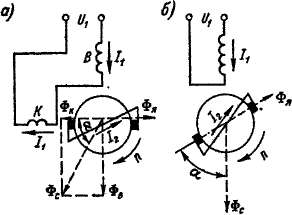 Рис. 43-8. Репульсионные двигатели с двумя (а) и одной (б) обмоткой на статоре и одним комплектом щеток
ния, а поток Фк обмотки К — только э. д. с. трансформации, величина которой не зависит от скорости вращения.
Передача электрической энергии ротору производится через обмотку К- Очевидно, что обмотки В и К (рис. 43-8, а) можно объединить в одну общую обмотку (рис. 43-8, б) и тем самым упростить устройство статора. Образование вращающего момента, действующего на ротор двигателя, можно иетолкрвать как результат отталкивания полюсов поля якоря Фя от Полюсов поля Статора Фс. Это и дало основание называть эти двигатели репульсионными.
На рис. 43-9 изображены схемы репульсионного двигателя с одной обмоткой на статоре и одним комплектом щеток (двигатель Томсона) при разных положениях щеток. На рис. 43-9, а угол а между осью обмотки статора и осью щеток якоря равен нулю. В этом положении при л = 0 в якоре индуктируется макси-
мальный ток /2, но момент М = 0. Это положение щеток называется положением короткого замыкания. При а = 90° (рис. 43-9, б) ток
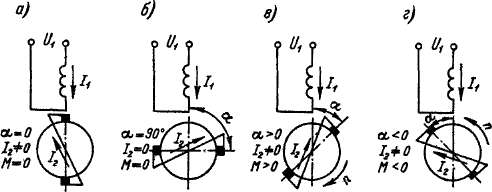 Рис. 43-9. Репульсионный двигатель с одним комплектом щеток в различных положениях
в обмотке якоря при п = 0 не индуктируется, и это положение щеток называется положением холостого хода.
При а Ф 0 и а Ф 90° двигатель развивает момент (М Ф 0) и направление вращения двигателя совпадает с направлением поворота щеток из по-
ложелия а—О (рис. 43-9, в и г). Зависимости пускового момента и пускового тока двигателя от угла а изображены на рис.-43-10. При а = const механические характеристики п = ( (М) репульсионного двигателя являются мягкими, т. е.
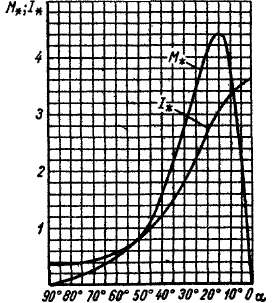 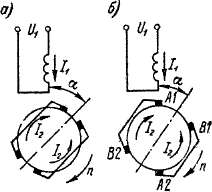 Рис. 43-10. Пусковые характеристики
репульсионного двигателя
Рис. 43-1J. Репульсионные двигатели с двумя комплектами щеток
репульсионные двигатели по своим рабочим свойствам аналогичны двигателям с последовательным возбуждением постоянного и переменного тока.
Имеются также репульсионные двигатели с двойным комплектом щеток (двигательДери,рис.43-И).Удвигателя,изображенного, на рис. 43-11,а, взаимное
расположение щеток неизменно и все щетки поворачиваются одновременно, а у двигателя, показанного на рис. 43-11, б, щетки А1 — А2 неподвижны, а щетки В1 — В2 являются поворотными. В обоих случаях часть обмотки якоря не обтекается током, что улучшает форму кривой н. с. обмотки якоря и условия коммутации. В случае на рис. 43-11, б, кроме того, при повороте щеток В1—В2 на угол 2а ось магнитного поля якоря поворачивается только на угол а, что позволяет произвести более тонкое регулирование скорости вращения.
Так как у репульсионных двигателей положение щеток не фиксировано, то применение добавочных полюсов невозможно. Статоры этих двигателей выполняются с неявновыраженными полюсами Улучшение условий коммутации возможно в основном только с помощью щеток с повышенным переходным сопротивлением и путем уменьшения числа витков секций обмотки якоря.
Содержание
Предыдущий § Следующий
| 