|
Содержание
Предыдущий § Следующий
Глава седьмая ПОТЕРИ И КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ ЭЛЕКТРИЧЕСКИХ МАШИН
§ 7-1. Потери
Общие положения. При работе электрической машины часть потребляемой ею энергии теряется бесполезно и рассеивается в виде тепла. Мощность потерянной энергии называют потерями мощности или просто потерями.
Потери в электрических машинах подразделяются на основные и добавочные. Основные потери возникают в результате происходящих в машине основных электромагнитных и механических процессов, а добавочные потери обусловлены различными вторичными явлениями. Во вращающихся электрических машинах основные потери подразделяются на 1) механические потери, 2) магнитные потери, или потери в стали, и 3) электрические потери.
К электрическим потерям относятся потери в обмотках, которые называются также потерями в меди, хотя обмотки и не всегда изготовляются из меди; потери в регулировочных реостатах и потери в переходном сопротивлении щеточных контактов.
Рассматриваемые в данной главе вопросы большей частью являются общими для машин постоянного и переменного тока.
Механические потери р„х состоят из 1) потерь в подшипниках,
2) потерь на трение щеток о коллектор или контактные кольца и
3) вентиляционных потерь, которые включают в себя потери на трение частей машины о воздух и другие потери, связанные с вентиляцией машины (мощность кинетической энергии отходящего воздуха и потери в вентиляторе). В ряде случаев электрические машины охлаждаются не воздухом, а водородом или водой, и соответствующие потери также относят к вентиляционным.
Потери в подшипниках pn0Rtn вычисляют по соотношениям, которые рассматриваются в курсах деталей машин и проектирования электрических машин. Эти потери зависят от типа подшипников (качения или скольжения), от состояния трущихся поверхностей, вида смазки и т. д. Важно подчеркнуть, что при работе данной машины эти потери зависят только от скорости вращения и не зависят от нагрузки.
Потери на трение щеток могут быть вычислены по формуле
где feTp — коэффициент трения щеток о коллектор или контактные кольца (kTp = 0,15 -f- 0,30); fm — удельное (на единицу площади) давление на щетку; 5Щ — контактная поверхность всех щеток; vK — окружная скорость коллектора или контактных колец.
Потери на вентиляцию рвент зависят от конструкции машины и рода вентиляции. Подробности расчета этих потерь рассматриваются в курсах проектирования электрических машин. В случае если вентиляция осуществляется не встроенным в машину, а отдельно стоящим вентилятором, потери на вентиляцию машины включают потребляемую мощность привода вентилятора.
В самовентилируемых машинах со встроенным центробежным вентилятором потери на вентиляцию иногда вычисляются приближенно по следующей эмпирической формуле:
Рвент = 1,75<2и2, вт, (7-2)
где Q — количество воздуха, прогоняемого через машину, ма/1ек; v — окружная скорость вентиляционных крыльев по их внешнему диаметру, м/сек.
Так как Q также пропорционально и, то из выражения (7-2) следует, что потери рвент пропорциональны третьей степени скорости вращения машины.
Общие механические потери
Рих = Рподш "Т Рвент ~Г Ртр.щ- ('"3)
Как следует из изложенного, в каждой данной машине потери рык зависят только от скорости вращения и не зависят от нагрузки. В машинах постоянного тока мощностью 10—500 кет потери pMS составляют соответственно около 2—0,5% от номинальной мощности машины.
Магнитные потери рмг включают в себя потери на гистерезис и вихревые токи, вызванные перемагничиванием сердечников активной стали (см. § В-4). Для вычисления этих потерь сердечник подразделяется на части, в каждой из которых магнитная индукция постоянна. Например, в машинах постоянного тока вычисляются отдельно потери в сердечнике якоря
Здесь р1О/5о и Pie/so — удельные потери в стали на единицу веса при частоте / = 50 гц и индукциях соответственно В = 1,0 тпл и В = 1,5 тл; Ва и Bz — средние значения индукции в спинке якоря и зубцах, Gca и Gcz — веса стали спинки якоря и зубцов; km и &дг — коэффициенты, учитывающие увеличение потерь вследствие обработки стали (наклеп при штамповке, замыкание листов в пакете), из-за неравномерности распределения индукции и несинусоидальности закона изменения индукции во времени.
В машинах постоянного тока можно принять km — 3,6 и kKZ — = 4,0.
К магнитным потерям относят также такие добавочные потери, которые зависят от величины основного потока машины (потока полюсов) и вызваны зубчатым строением сердечников. Эти потери иногда называют также добавочными, потерями холостого хода, так как они существуют в возбужденной машине уже при холостом ходе.
К указанным потерям в машинах постоянного тока относятся прежде всего поверхностные потери рпов в полюсных наконечниках, обусловленные зубчатостью якоря. Ввиду наличия зубцов и пазов на вращающемся якоре магнитная индукция в каждой точке поверхности полюсного наконечника пульсирует (см. рис. 2-4) с частотой
будучи максимальной, когда против рассматриваемой точки находится ^убец якоря, и минимальной, когда против этой точки находится паз якоря. Вследствие этого в полюсных наконечниках индуктируются вихревые токи, причем они протекают только в тонком поверхностном слое, так как fz имеет порядок тысячи и более герц. Величина этих потерь зависит от 1) величины пульсаций индукции, которая больше при открытых пазах на якоре, 2) частоты пульсаций fz и 3) толщины листов стали полюсов и степени их изолированности друг от друга на поверхности наконечника полюса.
Если пазы имеются также в полюсных наконечниках машины постоянного тока (при наличии компенсационной обмотки), то в зубцах якоря и полюсах в результате их взаимного перемещения возникают пульсации магнитного потока. Потоки в зубцах максимальны, когда зубец якоря расположен против зубца полюса, и минимальны, когда против зубца расположен паз. Частота этих пульсаций также велика. При этом возникают пульсационные потери рпульс в зубцах и поверхностные потери также на внешней поверхности якоря.
Подобные же поверхностные и пульсационные потери, вызванные зубчатым строением сердечников и зависящие от величины основного магнитного потока, возникают также в машинах переменного тока. Потери рпов и рпульс вычисляются по формулам, которые приводятся в курсах проектирования электрических машин.
К добавочным потерям холостого хода относятся также потери, которые возникают в проволочных бандажах, обмоткодержателях и в других деталях при их вращении в магнитном поле полюсов.
Общие магнитные потери
Электрические потери рВл в каждой обмотке вычисляют по формуле рЭл = Рг. Сопротивление обмотки зависит от ее температуры. Поэтому ГОСТ 183—66 предусматривает определение потерь в обмотках при расчетной температуре 75° С для классов изоляции обмоток А, Е и В и 115° С для классов F и Н. В нормальных машинах постоянного тока имеются две электрические цепи: цепь якоря и цепь возбуждения. Поэтому обычно рассчитывают потери в цепи якоря РэлоИ в цепи возбуждения рВлв.
Потери в обмотках можно выразить также через плотность тока в обмотке / и вес обмотки (без изоляции) G. Действительно,
Таким образом, формула (7-7) определяет потери в ваттах в медной обмотке весом G кг при 75° С и при плотности тока / а/мм2.
К электрическим потерям относят также потери в регулировочных реостатах и потери в переходных сопротивлениях щеточных контактов. Величина потерь в переходных сопротивлениях щеточных контактов для щеток одной полярности вычисляется по формуле
рая.щ = Аищ1, (7-8)
где At/m — падение напряжения на один щеточный контакт. Так как Л£Лц зависит сложным образом от разных величин и факторов,
то для упрощения расчетов, согласно ГОСТ 11828—66, принимается для угольных и графитных щеток Л£/щ = 1 в и для металлоуголь-ных щеток Д£/щ = 0,3 £.
Добавочные потери рд. К этой группе относят потери, вызванные различными вторичными явлениями при нагрузке машины. Поэтому указанные потери, зависящие от тока нагрузки, называют иногда также добавочными потерями при нагрузке.
В машинах постоянного тока одна часть рассматриваемых потерь возникает вследствие искажения кривой магнитного поля в воздушном зазоре при нагрузке под влиянием поперечной реакции якоря (см. § 5-1). В результате этого магнитный поток распределяется по зубцам и сечению спинки якоря неравномерно: с одного края полюсного наконечника индукция в зубцах и спинке якоря уменьшается, а<. другого края увеличивается. Такое неравномерное распределение потока вызывает увеличение магнитных потерь, подобно тому как неравномерное распределение тока в проводнике (например, в результате поверхностного эффекта) вызывает увеличение электрических потерь. Вследствие такого неравномерного распределения потока увеличиваются также поверхностные потери в полюсных наконечниках. При наличии компенсационной обмотки рассмотренная часть добавочных потерь практически отсутствует.
Другая часть добавочных потерь в машинах постоянного тока связана с коммутацией. При изменении во времени потоков рассеяния коммутируемых секций (см. рис. 6-9) в проводниках обмотки индуктируются вихревые токи. Добавочный ток коммутации также вызывает дополнительные потери.
Существуют также другие причины возникновения добавочных потерь (вихревые токи в крепежных деталях и т. п.).
Вследствие сложной природы добавочных потерь формулы для их вычисления получаются также сложными и, кроме того, не особенно точными. Экспериментальное определение этих потерь также затруднительно. Поэтому на практике добавочные потери чаще всего оценивают на основе опытных данных в виде определенного процента от номинальной мощности. Согласно ГОСТ 11828—66, эти потери для машин постоянного тока при номинальной нагрузке принимаются: при отсутствии компенсационной обмотки равными 1,0% и при наличии компенсационной обмотки равными 0,5% от отдаваемой мощности для генератора и проводимой мощности для двигателя. Для других нагрузок эти потери пересчитываются пропорционально квадрату тока нагрузки.
Все виды добавочных потерь, не связанные непосредственно с электрическими процессами в цепях обмоток машины, покрываются за счет механической мощности на валу машины.
Суммарные, или полные, потери р% представляют собой сумму всех потерь:
В качестве иллюстрации в табл. 7-1 приводятся данные о потерях в современной машине постоянного тока при номинальной нагрузке.
Таблица 7-1
|
Потери в
на 500
|
генераторе постоянного тока кет, 460 в, 375 об/мин
|
|
Вид потерь
|
|
Значение потерь в ваттах
|
Значение потерь в процентах от полных
|
|
Механические . .
|
|
3 200 9 200
|
8,2 23,3
|
|
Электрические . Добавочные . . .
|
|
22 000 5 000
|
55,8 12,7
|
|
Полные потери .
|
. . .
|
39 400
|
100
|
§ 7-2. Коэффициент полезного действия
Общие положения. Коэффициент полезного действия определяется как отношение полезной, или отдаваемой, мощности Р2 к потребляемой мощности Рг:
Современные электрические машины имеют высокий к. п. д. Так, у машин постоянного тока мощностью 10 кет к. п. д. составляет 83—87%, мощностью 100 кет— 88—93% и мощностью 1000 кет — 92—96%. Лишь малые машины имеют относительно низкие к. п. д.; например, у двигателя постоянного тока мощностью 10 вт к. п. д. 30—40%.
Кривая к. п. д. электрической машины т] = / (Р2) сначала быстро растет с увеличением нагрузки, затем к. п. д. достигает максимального значения (обычно при нагрузке, близкой к номинальной) и при больших нагрузках уменьшается (рис. 7-1). Последнее объясняется тем, что отдельные виды потерь (электрические 1'аГа и добавочные) растут быстрее, чем полезная мощность.

Прямой и косвенный методы определения к. п. д. Прямой метод определения к. п. д. по экспериментальным значениям Рх и Рг согласно формуле (7-10) может дать существенную неточность, поскольку, во-первых, Рг и Р2 являются близкими величинами и, во-вторых, их экспериментальное определение связано с погрешностями. Наибольшие трудности и погрешности вызывает измерение механической мощности.
Если, например, истинные значения мощности Рг = 1000 кет и Р2 = 950 кет могут быть определены с точностью 2%, то вместо истинного значения к. п. д.
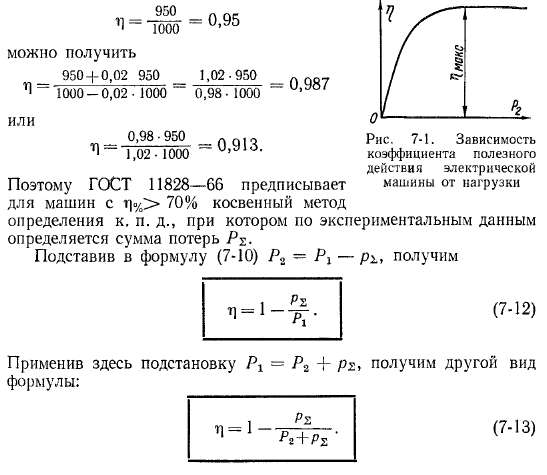 Так как более удобно и точно можно измерять электрические мощности (для двигателей Рх и для генераторов Pz), то для двигателей более подходящей является формула (7-12) и для генераторов — формула (7-13). Методы экспериментального определения отдельных потерь и суммы потерь р2 описываются в стандартах на электрические машины и в руководствах по испытанию и исследованию, электрических машин [25—29]. Если даже ps определяется со значительно меньшей точностью, чем Рх или Р2, при использовании
вместо выражения (7-10) формул (7-12) и (7-13) получаются все же значительно более точные результаты.
Условия максимума к. п. д. Различные виды потерь различным образом зависят от нагрузки. Обычно можно считать, что одни виды потерь остаются постоянными при изменении нагрузки, а другие являются переменными. Например, если генератор постоянного тока работает с постоянной скоростью вращения и постоянным потоком возбуждения, то механические и магнитные потери являются также постоянными. Наоборот, электрические потери в обмотках якоря, добавочных полюсов и компенсационной изменяются пропорционально 1%, а в щеточных контактах — пропорционально 1а. Напряжение генератора при этом также приблизительно постоянно, и поэтому с определенной степенью точности" Р2 -~ /о.
Таким образом, в общем, несколько идеализированном, случае можно положить, что
Это уравнение удовлетворяется, когда его знаменатель равен бесконечности, т. е. при &нг = оо. Этот случай не представляет интереса. Поэтому необходимо положить равным нулю числитель. При этом получимТаким образом, к. п. д. будет максимальным при такой нагрузке, при которой переменные потери к^тРг, зависящие от квадрата нагрузки, становятся равными постоянным потерям р0.
Значение коэффициента нагрузки при максимуме к. п. д., согласно формуле (7-18),
 Если машина проектируется для заданного значения цмаес, то, поскольку потери Ътрг обычно относительно малы, можно считать, что
Po + Pa«aPs = const.
Изменяя при этом соотношение потерь р0 и р2, можно достичь максимального значения к. п. д. при различных величинах нагрузки. Если машина работает большей частью при нагрузках, близких к номинальной, то выгодно, чтобы знанение кш [см. формулу (7-19)1 было близко к единице. Если машина работает в основном при малых-нагрузках, то выгодно, чтобы значение kac [см. формулу (7-19)1 было соответственно меньше.
Содержание
Предыдущий § Следующий
| 