|
Содержание Главная (библиотека)
Предыдущий § Следущий
§ 5.5. СПЕЦИАЛЬНЫЕ СИНХРОННЫЕ МАШИНЫ
Двигатели с постоянными магнитами. Синхронные двигатели с постоянными магнитами довольно просты по конструкции, надежны в работе и обладают значительной устойчивостью.
Электромагнитные процессы в машинах с постоянными магнитами протекают так же, как и в генераторах с электромагнитным возбуждением. Однако значительная реакция якоря во время пуска или при коротком замыкании может вызвать необратимое размагничивание постоянных магнитов, в результате чего после снятия размагничивающего действия свойства постоянного магнита не будут полностью восстановлены. Для уменьшения действия реакции якоря на постоянные магниты расстояние между полюсными наконечниками соседних полюсов делают значительно меньше, чем в машинах с электромагнитным возбуждением (см. рис. 5.10). В этом случае поток реакции якоря Фq в значительной степени замыкается через полюсные наконечники, не подвергая размагничиванию постоянные магниты.
Для возможности пуска в полюсных наконечниках располагается пусковая короткозамкнутая обмотка, выполненная по типу «беличьей клетки». То обстоятельство, что поток двигателя с постоянными магнитами нельзя регулировать, не имеет существенного значения при синхронном вращении, но во время пуска оказывает вредное влияние. При разгоне поток постоянных магнитов индуктирует в обмотке якоря э. д. с, которая имеет частоту вращения f = f1(1—s). Вызываемый этой э. д. с. ток замыкается через сеть и создает потери, покрываемые за счет подводимой к ротору механической мощности Рт. В результате на ротор при пуске двигателя действует тормозной момент
 величина которого зависит от скольжения s (рис. 5.25). Тормозной момент Мт обычно имеет максимум при скольжении s = 0,9÷0,6.
Полезный пусковой момент Мп двигателя равен разности асинхронного момента М и тормозного момента Мт. Вследствие действия тормозного момента Мт кривая пускового момента Мп имеет провал (рис. 5.25).
При правильном выборе пусковой обмотки минимальный результирующий пусковой момент Мпмин получается больше номинального Мн.
Реакция якоря при пуске двигателя размагничивает постоянный магнит. Максимальное размагничивание имеет место в момент «противовключения», когда ротор при асинхронном вращении со скоростью, близкой к синхронной, проходит положение, при котором угол θ = 180°. В этот момент размагничивающий ток якоря Iп определяется суммой напряжения сети U и э. д. с. вращения
 В машинах с электромагнитным возбуждением э. д. с. Е0 определяется лишь остаточным намагничиванием и имеет величину, не превышающую нескольких процентов. Поэтому
в двигателе с постоянными магнитами ток Iп имеет значительно большую величину.
Вследствие того, что в машинах с постоянными магнитами xd<xq, реактивная составляющая момента Мд уменьшает вращающий момент М двигателя при 0<θ<90° и увеличивает при 90<θ< 180°. При работе синхронной машины обычно угол θ<90°, поэтому в машинах с постоянными магнитами добавочный реактивный момент Мд уменьшает полный момент М синхронной машины.
Рабочие характеристики двигателей с постоянными магнита-
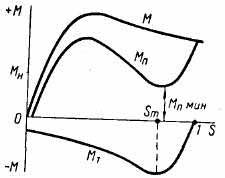 Рис. 5.25. Кривые пускового и тормозного момента при пуске синхронного двигателя с постоянными магнитами
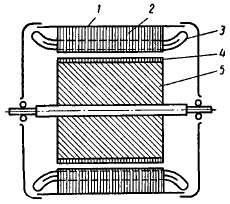 Рис. 5.26. Конструкция гистерезисного двигателя с цилиндрическим ротором: 1 — корпус; 2 — пакет статора; 3 — обмотка статора; 4 — цилиндр из магнитотвердого материала; 5 — сердечник или втулка
ми мало отличаются от характеристик (см. рис. 5.24) двигателей с обмоткой возбуждения.
Недостатком двигателей с постоянными магнитами является сравнительно низкий коэффициент мощности и сложность изготовления ротора.
Гистерезисные двигатели. В последнее время в схемах автоматики получили широкое распространение гистерезисные двигатели, ротор которых имеет стальной цилиндр (рис. 5.26), выполненный из магнитотвердого материала (например, из викаллоя). С целью экономии дорогостоящего магнитотвердого материала роторы обычно делают сборными. Они состоят из втулки 5 и наружного массивного или шихтованного цилиндра 4 из магнитотвердого материала. Зазор между статором и ротором равномерный по всей окружности. Статор у гистерезисных двигателей такой же, как у других синхронных и асинхронных двигателей. Внешний вид гистерезисных двигателей не отличается от внешнего вида асинхронных двигателей с массивным стальным ротором.
Магнитодвижущая сила обмотки якоря намагничивает стальной цилиндр ротора, в результате чего при синхронном вращении он становится постоянным магнитом. Во время пуска и при асинхрон-
ном ходе поток якоря, вращающийся относительно ротора, перемагничивает стальной цилиндр. При этом полярность цилиндра как бы поворачивается вслед за полем якоря. Если бы ротор был выполнен из магнитомягкого материала, то вектор, определяющий направление потока в цилиндре ротора, точно совпадал бы с вектором вращающегося потока якоря. Вследствие сильно выраженного гистерезиса имеет место сдвиг векторов на угол θг, вызванный молекулярным трением. Угол θг отставания потока в роторе не зависит от частоты перемагничивания, он определяется лишь магнитными свойствами материала цилиндра. Поэтому создающийся в двигателе гистерезисный электромагнитный момент Мг не зависит от скорости вращения двигателя (кривая 2, рис. 5.27).
При пуске и асинхронном вращении ротора в массиве цилиндра возникают вихревые токи. В результате их взаимодействия с потоком машины создается асинхронный момент. Активное сопротивление ротора гистерезисного двигателя велико, поэтому критическое скольжение больше единицы и максимальное значение асинхронный момент имеет при пуске. При синхронном вращении он равен нулю (кривая 3, рис. 5.27). Таким образом, во время пуска помимо гистерезисного момента возникает также асинхронный, вследствие чего при s>0 суммарный момент двигателя возрастает (кривая 1).
У двигателей с шихтованным цилиндром из магнитотвердого материала асинхронный момент практически отсутствует. Двигатели с массивным цилиндром могут работать в синхронном и в асинхронном режимах. В последнем случае их момент увеличивается. Однако при асинхронном режиме перемагничивание кольца, выполненного из магнитотвердого материала, связано с большими потерями, поэтому гистерезисные двигатели обычно работают в синхронном режиме или в асинхронном при небольшом скольжении ротора. Для уменьшения потерь от зубцовых гармоник в двигателях с массивным цилиндром желательно иметь на статоре закрытые пазы.
При синхронном вращении момент двигателя определяется углом θ. С изменением нагрузки угол 0 изменяется, но не может превысить угол θг, определяемый магнитными свойствами материала. В первом приближении можно считать, что при угле θ гистерезисный момент
 Если угол θ, соответствующий моменту на валу двигателя, превышает θг, то двигатель переходит в асинхронный режим.
Ток, потребляемый гистерезисным двигателем из сети, сравнительно мало изменяется при разгоне. Поэтому в случае использования одного конденсатора создаются благоприятные условия для создания кругового поля при пуске и синхронном вращении. При
малых нагрузках к. п, д. и cosφ двигателя ухудшаются, так как его ток остается почти неизменным (рис. 5.28).
Существенными преимуществами гистерезисных двигателей по сравнению с синхронными двигателями других типов являются большие моменты, пусковой и входа в синхронизм, плавность входа в синхронизм, малый пусковой ток (1,1÷1,5), простота конструкции, надежность в эксплуатации, бесшумность при работе и высокий к. п. д. (достигающий 65%), малые вес и габариты. Преимущест-
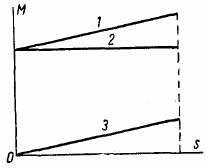 Рис. 5.27. Моментная характеристика гистерезисного двигателя
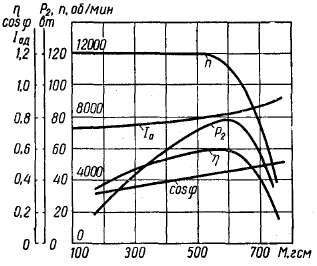 Рис. 5.28. Рабочие характеристики гистерезисного двигателя: Uн=127b; f1=400 гц; n=12000 об/мин; m=3
вом гистерезисных двигателей по сравнению со всеми другими синхронными двигателями является возможность их выполнения многоскоростными с переключением обмотки статора на различное число полюсов.
К недостаткам гистерезисных двигателей следует отнести склонность ротора к качаниям. Особенно это имеет место, когда цилиндр из магнитотвердого материала выполнен шихтованным, так как токи в стали ротора оказываются малыми, и их демпфирующее действие незначительным. Недостатком гистерезисных двигателей является также малый cosφ, который обычно не превышает 0,5. В асинхронном режиме коэффициент мощности низок вследствие малой магнитной проницаемости ротора, а в синхронном — из-за сравнительно малой м. д. с. цилиндра ротора.
Коэффициент мощности, момент и к. п. д. двигателя могут быть существенно увеличены кратковременным подмагничиванием ротора, что может быть осуществлено повышением на 1÷2 периода напряжения, подводимого к статору. Подмагниченный таким образом ротор разгружает обмотку статора от намагничивающего тока. В некоторых случаях после подмагничивания максимальный момент двигателя в синхронном режиме может увеличиться в 4÷6 раз, а ток статора уменьшится вдвое и стать опережающим.
Реактивные двигатели. Реактивные двигатели распространены в аппаратах звукозаписи, звуковоспроизведения, лентопротяжные и других механических системах, в которых требуется строго постоянная скорость вращения при небольших моментах сопротивления на валу.
Реактивный двигатель представляет собой явнополюсную синхронную машину без обмотки возбуждения. Поток двигателя и его вращающий момент создается м. д. с. реакции якоря, отсюда и наз-
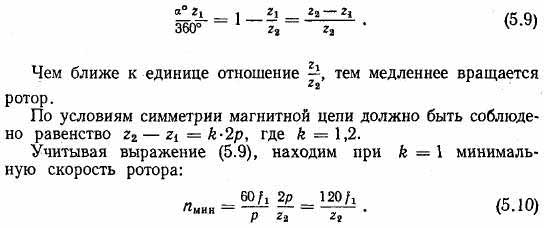
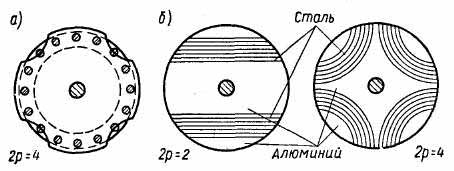 Рис. 5.29. Конструкции роторов синхронных реактивных двигателей: а — со впадинами; б — секционированные
вание — реактивный двигатель. Момент двигателя Мд (5.7) возникает за счет дополнительной мощности Рд(5.6), имеющей место вследствие неодинаковой проводимости ротора по осям d и q. Наивыгоднейшим отношением xq/xd можно считать величину, близкую к 0,5.
Роторы, в основном, выполняются двух типов: со впадинами (рис. 5.29, а) и секционированные (рис. 5.29, б). В последнем случае промежутки между магнитопроводящими секциями пластин ротора заполняются слоями алюминия или меди, которые образуют короткозамкнутую пусковую клетку. Секционированный ротор имеет большую магнитную проводимость по продольной оси и меньшее отношение xq/xd, в результате чего увеличивается максимальный реактивный момент двигателя. Ротор со впадинами шихтуется из штампованных стальных листов, имеющих специальный профиль, или в некоторых случаях выфрезеровывается из обычного ротора короткозамкнутого асинхронного двигателя.
Намагничивающий ток реактивного двигателя, так же как и асинхронного, поступает из сети переменного тока со стороны обмотки статора. На векторной диаграмме (рис. 5.30) реактивного двигателя э. д. с. Е0, индуктируемая потоком возбуждения, равна нулю, в остальном диаграмма не отличается от диаграммы, представленной на рис. 5.16, а.
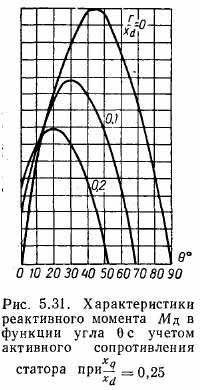
Согласно выражению (5.7) реактивный момент Мд двигателя пропорционален синусу двойного угла θ и имеет максимум при θ = 45°. Подробное исследование реактивного момента с учетом активного сопротивления обмотки статора rа показывает, что, вследствие влияния rа, максимальное значение реактивного момента Мд уменьшается. В этом случае максимум Мд имеет место при угле θ=25÷40° (рис. 5.31).
У реактивных двигателей отсутствует начальный пусковой момент. Поэтому их роторы снабжаются короткозамкнутой пусковой
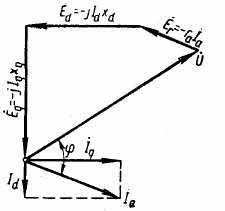 Рис. 5.30. Векторная диаграмма реактивного двигателя
 обмоткой. При синхронном вращении короткозамкнутая обмотка является успокоительной, демпфирующей колебания ротора.
Однофазные реактивные двигатели часто выполняются конденсаторными. Эллиптичность поля приводит к неравномерному вращению двигателей, к появлению шума и вибраций. Поэтому обычно реактивные двигатели проектируют таким образом, чтобы круговое поле имело место при номинальном, синхронном режиме. Для увеличения пускового момента двигатели иногда выполняют с пусковой и рабочей емкостями.
В настоящее время в случаях, когда не требуется строгого постоянства скорости вращения, реактивные двигатели заменяются гистерезисными, которые имеют лучшие пусковые и рабочие свойства. На практике иногда синхронный реактивный двигатель получают из асинхронного. При этом статор оставляют без изменения, а в роторе выфрезеровывают часть стержней короткозамкнутой обмотки (см. рис. 5.29, а). Мощность такого синхронного двигателя составляет 35—40% от асинхронного, его к. п. д. и коэффициент мощности также ухудшаются.
Недостаток реактивных двигателей — низкий максимальный момент, коэффициент мощности (cosφ = 0,5) и к. п. д. У двигателей мощностью в несколько десятков ватт η=35÷40%, а у двигателей мощностью в несколько ватт η<25%.
К достоинству реактивных синхронных двигателей следует отнести отсутствие колебаний ротора и высокую надежность работы.
Редукторный реактивный двигатель с многофазной обмоткой статора. Часто в системах автоматики, особенно при высокочастотных источниках питания, требуется, чтобы скорость вращения двигателя была весьма низкой по отношению к скорости вращения синхронного поля. В этих случаях удобно применять редукторные двигатели, которые позволяют получить малую скорость вращения электрическим способом (без применения механического редуктора) при стандартной частоте питающей сети.
Принцип электромагнитной редукции основан на использовании зубцовых гармоник электромагнитных полей, возникающих при открытых пазах статора и ротора. В открытых пазах статора 1 (рис. 5.32) располагается трех- или двухфазная обмотка, создающая вращающееся магнитное поле. На поверхности статора 1 и ротора 2 имеются зубцы. Число зубцов статора (z1) и ротора (z2) выбирается неодинаковым, и зуб-цовые шаги оказываются разными. Если положение осей зубцов статора и ротора, имеющих номер 1, совпадает в пространстве, то оси зубцов 2 сдвинуты на угол α, оси зубцов 3 сдвинуты на угол 2α, оси n-ных зубцов сдвинуты на
(п—1)α,
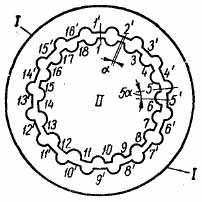 Рис 5.32. Конструкция статора и ротора редукторного реактивного двигателя: / — статор; // — ротор; 1' — 16' — зубцы статора; 1 — 18 — зубцы ротора
 Ротор двигателя поворачивается таким образом, чтобы проводимость потока была наибольшей. Это имеет место, если оси потока зубца статора и зубца ротора совпадают по направлению. Допустим, что в начальный момент времени ось потока совпадает с осью зубца 1' статора (рис. 5.32). Через некоторое время ось потока поворачивается и совпадает с осью зубца 2' статора. За это время ротор поворачивается на угол α таким образом, чтобы оси зубцов 2 ротора и 2' статора совпадали. За время, в течение которого поток статора поворачивается на угол, соответствующий п зубцам, ротор поворачивается всего лишь на угол, равный пα. За время одного полного оборота поток статора поворачивается на z1 зубцов, а ротор на угол αz1, т. е. ротор вращается медленнее потока статора в
 Из формулы (5.10) следует, что минимальная скорость вращения определяется числом зубцов ротора и не зависит от числа полюсов машины. Достоинством редуктор-ных двигателей этого типа является равномерная скорость вращения.
Однофазный редукторный реактивный двигатель. При z1 = z2 реактивный редукторный двигатель работает только как однофазный, поток которого пульсирует. На статоре 1 (рис. 5.33) двигатель имеет однофазную обмотку, обычно выполняемую в виде катушки. Зубцовое деление на поверхности статора и ротора одинаково и соответствует числу зубцов.
Двигатель не имеет начального пускового момента. Для приведения во вращение его необходимо раскрутить. При синхронном вращении в момент увеличения пульсирующего потока до максимального значения все зубцы ротора притягиваются к зубцам статора. Когда поток спадает, диск ротора поворачивается дальше по инерции. Затем при достижении следующего максимального значения потока зубцы ротора притягиваются к соседним зубцам статора и т. д. За полпериода изменения тока диск ротора поворачивается на угол, соответствующий одному зубцу. Скорость вращения двигателя
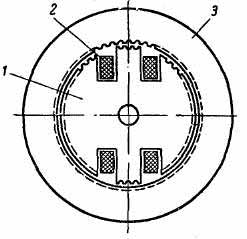 Рис. 5.33. Однофазный реактивный двигатель с зубчатым ротором: 1 — статор; 2 — обмотка статора; 3 — ротор
 При выпадении двигателя из синхронизма ротор останавливается, в этом случае среднее значение момента равно нулю.
Так как поток и вызываемый им момент пульсируют, то скорость вращения двигателя неравномерна. Для сглаживания неравномерности вращения ротор выполняют с большим моментом инерции, поэтому обычно его делают внешним. Такие двигатели применяются для электропроигрывателей. При 77 зубцах и частоте питания f = 50 гц двигатель имеет 78 об/мин.
Шаговые двигатели. Для преобразования управляющих импульсов в заданный угол поворота применяются синхронные двигатели, в которых поле вращается не равномерно, а при подаче сигнала поворачивается скачкообразно. Такие двигатели называются шаговыми или импульсными.
На статоре шаговые двигатели имеют две (иногда три) сдвинутые в пространстве обмотки, которые могут быть сосредоточенными или распределенными. Ротор двигателей всегда имеет явновыражен-ное исполнение. Шаговые двигатели разделяются на двигатели с активным ротором (имеющие обмотку возбуждения или постоянные магниты) и двигатели с реактивным ротором (не имеющие возбуждения).
Шаговый двигатель работает следующим образом. В обмотку статора (или комбинацию статоров) подается постоянный ток. При этом полюса ротора устанавливаются против возбужденных полюсов статора, по обмоткам которых проходит ток. Когда постоянный ток подают в другие обмотки статора, ротор поворачивается на один шаг в положение, при котором его полюсы устанавливаются против следующих возбужденных полюсов статора. При каждом переключении постоянного тока в обмотках управления ротор двигателя поворачивается на один шаг.
К шаговым двигателям предъявляются следующие требования: надежность в работе, быстродействие, малый шаг, недопустимость накопления ошибки с увеличением числа шагов, отсутствие свободных колебаний при отработке шага, минимальное число обмоток управления.
Существует много конструкций шаговых двигателей, одна из них изображена на рис. 5.34. Число пазов статора двигателя выбирается кратным четырем. Один зубцовый шаг статора соответствует половине полюсного деления. На статоре укладываются две независимые обмотки I и II, состоящие из катушек, которые охватывают, один зубец. Катушки каждой обмотки надевают на зубцы, расположенные через один. Таким образом, зубцы, охватываемые катушками одной и другой обмоток, чередуются. Полярность зубцов, создаваемая одной обмоткой, изменяется от одного зубца к другому. Катушки уложены таким образом, что если бы по обеим обмоткам одновременно проходил ток, то рядом расположились бы два зубца одинаковой полярности, охватываемые катушками разных обмоток.
Ширина полюсного наконечника ротора соответствует ширине одного зубца, но число полюсов ротора в два раза меньше числа
зубцов на статоре. Поэтому полюса ротора находятся под пазами статора, расположенными через один. Эти пазы охватываются катушками одной обмотки.
Обмотка возбуждения полюсов ротора питается постоянным током через контактные кольца. В статорные обмотки двигателя по-
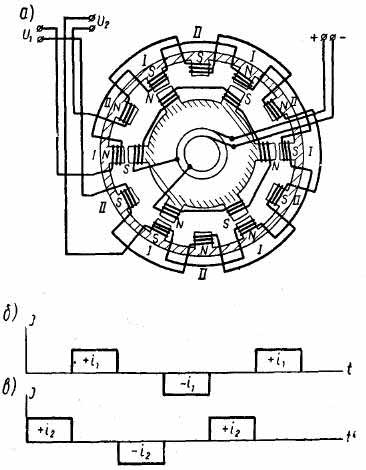 Рис. 5.34. Устройство шагового двигателя: а — схема двигателя; б — изменение тока в обмотке I статора; в — изменение тока в обмотке II статора
очередно подаются импульсы постоянного тока (рис. 5.34, б и в). Полярность тока в обмотке при переключении изменяется. При каждом переключении тока в обмотках статора ротор поворачивается на один шаг. Чтобы двигатель изменил направление вращения, необходимо изменить полярность включения одной из обмоток статора.
В некоторых схемах обмотка возбуждения двигателя может быть включена в цепь анода лампы или через полупроводниковый выпрямитель (рис. 5.35, а). В этом случае ток проходит только в течение одной половины периода. Такие двигатели называются одно-тактными. Иногда обмотку разбивают на две: В1 и В2 (рис. 5.35, б).
В следствие встречного включения вентилей в одной половине периода ток проходит по обмотке В1, в другой половине периода по В2. Такие двигатели называются двухтактными. Ротор двухтактных двигателей такой же, как и у однотактных, но конструк-
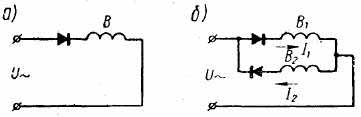 Рис. 5.35. Схемы соединения обмоток возбуждения при питании пульсирующим током шагового двигателя: а — однотактного двигателя; б — двухтактного
ция статора имеет некоторые особенности. Число зубцов на статоре выбирается в два раза меньше, чем на роторе. Полюсные наконечники на зубцах статора попарно смещены таким образом, что если полюсные наконечники зубцов 1, охватываемых обмоткой В1, расположены против пазов ротора, то наконечники зубцов 2, охватываемые обмоткой В2, расположены против зубцов ротора (рис. 5.36) и наоборот. В двухтактном двигателе значительно уменьшается пульсация момента.
Для уменьшения шага двигатели, иногда выполняют по типу редуктор-ных. В этом случае поверхность роторных и статорных зубцов имеет мелкие зубчики.
Современные двигатели позволяют делать до 200 шагов в секунду без потери шага при внезапных остановках и пусках. Шаговые двигатели находят широкое применение в ракетной технике, счетно-решающих машинах, самозаписывающих и лентопротяжных механизмах.
Индукторные генераторы высокой частоты. Генераторы, вырабатывающие энергию переменного тока с частотой от ста до нескольких- тысяч герц, нашли широкое применение в радиолокации, электротермии, самолетных установках и в деревообрабатывающей промышленности. В большинстве случаев подобные генераторы выполняются однофазными.
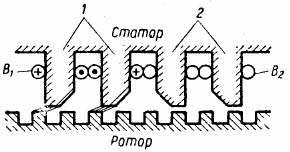 Рис. 5.36. Схема пазов двухтактного двигателя
В генераторах индукторного типа обмотки возбуждения и якоря выполняются неподвижными и закладываются в одни и те же открытые пазы статора (рис. 5.37). Обмотка возбуждения так же, как и в обычных генераторах, питается постоянным током. Пазы и зубцы на статоре и на роторе имеют близкую ширину. При вращении ротора магнитная проводимость изменяется, в результате чего магнитный поток пульсирует (рис. 5.38) от максимального значе-
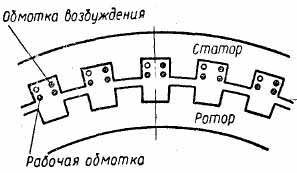 Рис. 5.37. Устройство простейшего индукторного генератора
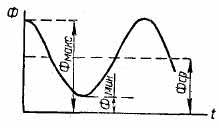 Рис. 5.38. Изменение потока индукторного генератора
ния Фмакс (когда против зубцов статора находятся зубцы ротора) до минимального значения Фмин (когда против зубцов статора находятся пазы ротора). Постоянная составляющая потока Фср не оказывает влияния на работу машины. Амплитуда индуктируемой э. д. с. пропорциональна значению потока
 Величина основной гармоники э. д. с. определяется по уравнению (4.38), где частота изменения э. д. с.
 Здесь z — число зубцов;
п — скорость вращения ротора, об/мин.
Недостатком генератора такой конструкции является то, что э. д. с. индуктируется не только в обмотке якоря, но и в обмотке возбуждения. Кроме того, технологически неудобно закладывать обмотки в каждый паз статора. Поэтому обычно пазы статора разбивают на несколько групп. Обмотки закладывают не во все пазы, а только в особые, которые имеют большую ширину.
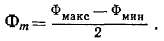
Зубцы статора, которые служат для создания пульсации потока, разбивают на группы I и II (рис. 5.39), разделяемые большими пазами. Большие пазы имеют такую ширину, что если под группой зубцов I располагаются зубцы ротора, то под группой зубцов II — пазы ротора. При вращении ротора положение групп I и II относительно ротора чередуется. Группа I зубцов охватывается об-
моткой якоря 0ЯI, группа II охватывается обмоткой якоря 0ЯII. При сохранении направления намотки в обмотках 0ЯI и 0ЯII индуктируются э. д. с, направленные встречно. Шаг обмотки возбуждения в индукторном генераторе этого типа в два раза больше, чем шаг обмотки якоря, таким об' разом, один виток обмотки возбуждения охватывает группы зубцов I и II. Так как при нарастании потока в зубцах группы I поток в зубцах группы II убывает, то общий поток, охватываемый обмоткой возбуждения, остается неизменным. Поэтому в ней не индуктируется э. д. с.
В некоторых случаях индукторные генераторы имеют два статора I и II (рис. 5.40), расположенные в осевом направлении. В роторе поток проходит в направлении оси вала. Пазы ротора под статором I сдвинуты на половину зубцового шага относительно пазов статора II таким образом, что если под группой пазов статора I
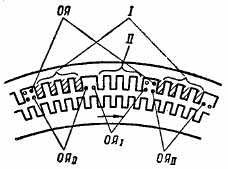 Рис .5.39. Расположение пазов и обмоток индукторного генератора
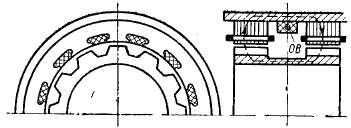 Рис. 5.40. Конструктивная схема индукторного генератора с двойным статором
располагаются зубцы ротора, то под группой пазов статора II — пазы ротора. Поэтому поток обмотки возбуждения не пульсирует, и рабочий процесс генератора аналогичен рассмотренному выше. Характеристика холостого хода индукторного генератора, магнитная цепь которого имеет небольшое насыщение, не отличается от характеристики обычного генератора. При большом насыщении зубцов статора значительная часть потока проходит не только по зубцам, но и по пазам. В результате этого разность Фмакс и Фмин становится меньше, и пульсация потока э. д. с. генератора уменьшается. Поэтому характеристика холостого хода насыщенного индукторного генератора после некоторого максимума начинает падать (рис. 5.41).
Реакция якоря индукторных генераторов такая же, как и у обычных. Внешние и регулировочные характеристики близки к соответствующим характеристикам генераторов обычного типа (см. рис. 5.8 и 5.9).
Коэффициент полезного действия индукторных генераторов значительно меньше, чем у обычных генераторов: при cosφ = 1, η = 0,44÷0,75. Низкое значение к. п. д. объясняется повышенными добавочными потерями в стали и в обмотке якоря вследствие высокой частоты перемагничивания.
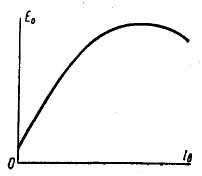 Рис. 5.41. Характеристика холостого хода индукторного генератора
ВОПРОСЫ
1. Какого типа синхронные двигатели применяются в схемах автоматики, звукозаписи и счетно-решающих устройств? Какие преимущества и недостатки имеют гистерезисные и реактивные двигатели? Почему обычные двигатели вращаются равномерно, а шаговые дискретно? В чем заключаются особенности пускового режима двигателя с постоянными магнитами? Как предохраняется постоянный магнит от размагничивающего действия при пуске двигателя?
2. В результате чего возникает гистерезисный момент? При каких скольжениях действуют гистерезисный и асинхронный моменты?
3. Почему реактивные двигатели имеют низкий cosφ? Каким образом создается начальный пусковой момент реактивных двигателей? Почему однофазные редукторные реактивные двигатели не имеют пускового момента? Как осуществляется электромагнитная редукция у многофазного редуктор-ного реактивного двигателя? Какое влияние оказывает активное сопротивление обмотки статора на характеристики реактивных синхронных двигателей?
4. Как создается э. д. с. в обмотке якоря индукторного генератора? Как изменяется характеристика холостого хода при насыщении индукторного генератора?
Содержание Главная (библиотека)
Предыдущий § Следущий
| 