|
Содержание Главная (библиотека)
Предыдущий § Следущий
§ 5.4. ВЕКТОРНЫЕ ДИАГРАММЫ И ХАРАКТЕРИСТИКИ СИНХРОННОГО ДВИГАТЕЛЯ
Векторные диаграммы и реакция якоря. Так же, как и в машинах постоянного тока, в двигательном режиме синхронной машины э. д. с. Е0, индуктируемая потоком возбуждения, является противо-э.д.с. и представляет собой составляющую падения напряжения по отношению к напряжению сети. Поэтому уравнение напряжения синхронного двигателя отличается от уравнений напряжения генератора (5.3) и (5.5) знаком э. д. с. Е0, т. е.
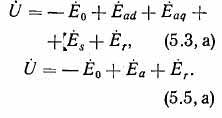 Уравнению (5.5, а) соответствует векторная диаграмма синхронного неявнополюсного двигателя (рис. 5.15); уравнению (5.3, а) — векторная диаграмма явнополюсного двигателя (рис. 5.16). На диаграммах явнополюсного дви-
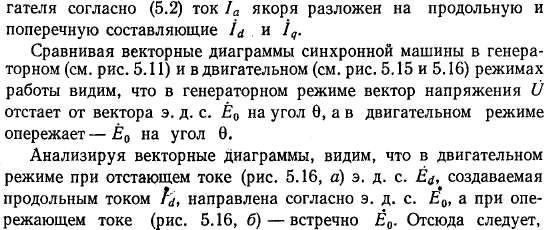 что реакция якоря при отстающем токе намагничивает, а при опережающем токе размагничивает двигатель. Таким образом, реакция якоря в двигательном и в генераторном режимах действует в противоположных направлениях по отношению к магнитной системе машины. По отношению к сети синхронная машина действует следующим образом: при перевозбуждении как в двигательном, так и в генераторном режимах отдает в сеть опережающий емкостный ток, а при недовозбуждении берет его из сети.
 Рис. 5.15. Векторные диаграммы неявнополюсного синхронного двигателя
реактивной составляющей тока якоря (кривые III и IV на рис. 5.17) и никакого изменения вращающего момента не происходит. Зависимость тока якоря от тока возбуждения (рис. 5.17) называется
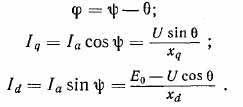
U-образной характеристикой синхронной машины. Анализируя эти характеристики, видим, что минимальное значение тока якоря имеет место при некотором определенном значении тока возбуждения, соответствующем работе с cosφ = 1. При любом изменении (увеличении или уменьшении) тока возбуждения ток якоря Ia возрастает вследствие увеличения реактивной составляющей.
На рис. 5.17 проведена пунктирная линия, в точках пересечения которой с U-образными характеристиками cosφ равен единице. Слева и справа от этой линии cosφ меньше единицы. Слева ток якоря содержит отстающую составляющую по отношению сети, справа — опережающую. Обычно двигатели работают с перевозбуждением, т. е. с. опережающим током при cosφ = 0,9. U-образная характеристика имеет место также у синхронных генераторов, работающих параллельно с сетью.
В некоторых случаях ненагруженную синхронную машину включают на работу в режиме перевозбуждения для того, чтобы она отдавала в сеть реактивную мощность. Действие перевозбужденной синхронной машины на сеть эквивалентно присоединению к питающей сети емкости. При этом оказывается возможным компенсировать в системе сдвиг фаз между током и напряжением, создаваемый асинхронными двигателями. Синхронную машину для работы вхолостую в режиме перевозбуждения, называют компенсатором.
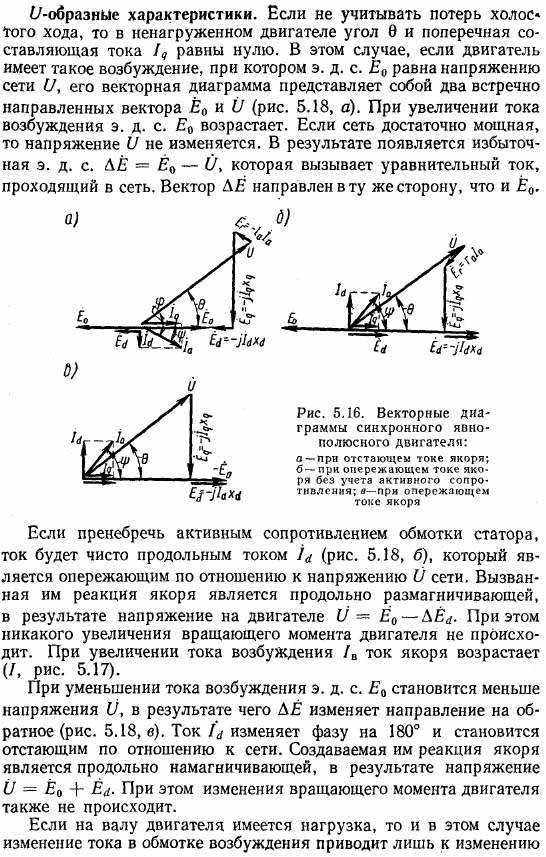
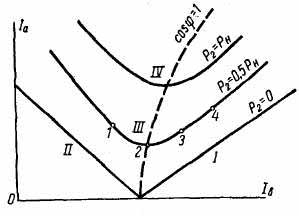 Рис. 5.17. Векторная диаграмма ненагру-женного синхронного двигателя при питании от сети бесконечной мощности: а — э. д. с. E0 равна напряжению U сети; б — э. д. с. E0 больше напряжения U; в — э. д. с. E0 меньше напряжения U
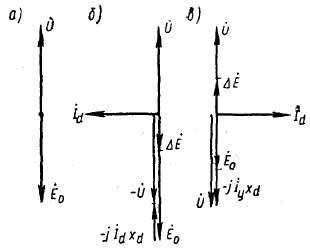 Рис. 5.18. U-образные характеристики
Векторная диаграмма м. д. с. двигателя при изменении тока возбуждения. При построении диаграммы не будем учитывать падения напряжения в сопротивлениях обмотки якоря, т. е. примем, что э. д. с. воздушного зазора — Еδ = U (рис. 5.19). Электродвижущая сила Еδ индуктируется потоком Фδ, который опережает
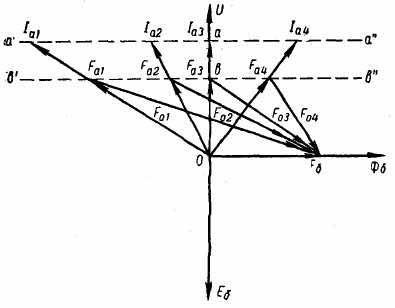 Рис. 5.19. Векторная диаграмма м. д. с. двигателя при изменении тока возбуждения
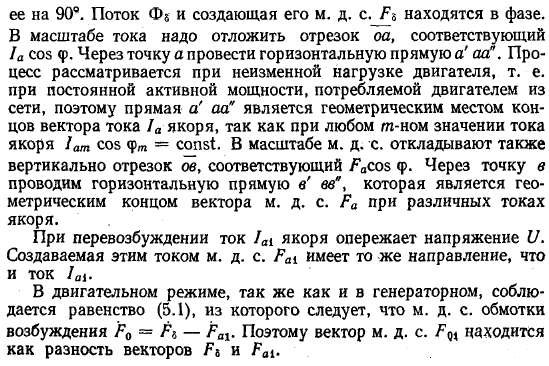
Пользуясь диаграммой м. д. с. (рис. 5.19), можно построить U-образные характеристики (см. рис. 5.17). Для этого, откладывая по оси абсцисс ток возбуждения (см. рис. 5.17),, соответствующий м. д. с. F01, а по оси ординат ток Ia1 якоря, получают точку 1 U-образной характеристики. Другие точки характеристики строятся аналогично.
Электромагнитная мощность и вращающий момент. Пользуясь векторной диаграммой явнополюсного синхронного двигателя (см. рис. 5.16, в), не учитывающей активного сопротивления якоря rа, выведем выражение электромагнитной мощности. Потребляемая двигателем из сети активная мощность Р1 = mUIacos φ. В синхронном двигателе электромагнитная мощность Р, передаваемая со статора на ротор, меньше потребляемой из сети активной мощности P1 на величину потерь в активном сопротивлении обмотки статора и потерь в стали статора. Пренебрегая этими потерями, можно считать, что Р = P1. В этом случае из диаграммы имеем:
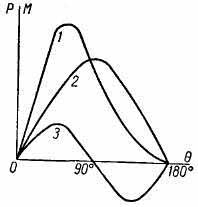 Рис. 5.20. Угловая характеристика
 Подставляем эти выражения в формулу мощности:
 или P = Pосн + Pд.
Из выражения (5.6) следует, что электромагнитная мощность Р явнополюсного синхронного двигателя имеет основную составляющую Pосн, пропорциональную синусу угла θ и дополнительную составляющую Рд, пропорциональную разности хd — xq и синусу двойного угла θ. Зависимость полной электромагнитной мощности (кривая 1, рис. 5.20), ее основной (кривая 2) и дополнительной (кривая 3) составляющих от внутреннего угла θ называется угловой характеристикой,
Амплитуда дополнительной составляющей обычно не превышает 25-30% основной. В явнополюсных машинах с электромагнитным возбуждением xd>xq и дополнительная мощность Рд при угле θ = 45° имеет максимальное положительное значение.
При работе двигателя обычно θ<45°, поэтому дополнительная мощность увеличивает полную электромагнитную. Вследствие действия дополнительной мощности Рд полная электромагнитная мощность Р имеет максимальное значение при угле θ<90° (см. рис. 5.20).
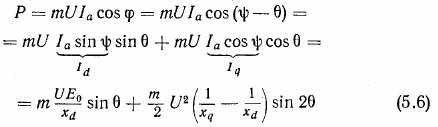
 Рис. 5.21. Направление магнитного потока в роторе явнополюсного генератора: а — θ=0; б — θ≠0; nД - направление скорости вращения в режиме двигателя; nг — направление скорости вращения в режиме генератора
В двигателях с постоянными магнитами xd<xq, поэтому у них дополнительная мощность Рд имеет обратный знак, и при работе (θ<45°) уменьшает полную мощность. Вследствие этого полная электромагнитная мощность Р достигает максимального значения при угле θ>90°. В неявнополюсных машинах xd=xq, поэтому дополнительная составляющая мощности Рд у них отсутствует.
Рассмотрим физику процесса возникновения в явнополюсной машине дополнительной мощности Рд. В явнополюсной машине поток всегда стремится пойти вдоль оси полюса, так как это направление имеет меньшее магнитное сопротивление (рис. 5.21, а). Поворот магнитного потока относительно оси полюса явнополюсного ротора вызывает деформацию потока (рис. 5.21, б). Действие деформации магнитного потока (растяжение условных линий магнитной индукции) можно сравнить с действием растягиваемых резиновых нитей, которые стремятся сократиться. При этом возникает так называемый реактивный момент Мд, определяемый добавочной
мощностью Рд, величина которого пропорциональна синусу угла 2θ.
Из формулы (5.6) получаем выражение электромагнитного момента синхронного двигателя
 Выражению (5.7) соответствует в определенном масштабе угловая характеристика (рис. 5.20).
Меняя момент сопротивления на валу, можно изменять электромагнитный момент М синхронного двигателя. При возрастании момента М угол θ увеличивается. При отсутствии нагрузки на валу двигателя θ = 0. При переходе в генераторный режим угол θ меняет знак, в двигательном режиме поток якоря опережает ротор, а в генераторном режиме ротор опережает поток якоря.
Согласно (5.6) электромагнитная мощность Росн двигателя и согласно (5.7) его электромагнитный момент зависят от величины Е0. Однако регулировать электромагнитную мощность и момент двигателя током возбуждения нельзя, так как при увеличении э. д. с. Е0 угловая характеристика переходит с кривой 2 на кривую 1 (рис. 5.22) и устанавливается новый режим, при котором угол θ уменьшается (θ1<θ2), а электромагнитная мощность и момент остаются прежними.
Угловая характеристика имеет место также у синхронных генераторов, работающих параллельно с сетью.
Синхронизирующая мощность. Работа синхронной машины устойчива, если при увеличении внутреннего угла θ увеличивается
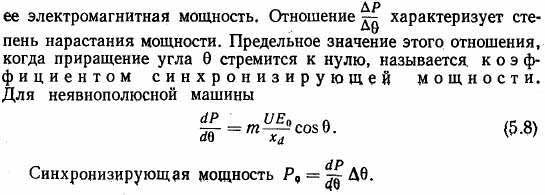  Рис. 5.22. Угловые характеристики неявнополюсного двигателя
Из формулы (5.8) следует, что если машина имеет максимально возможную электромагнитную мощность Р (θ = 90°), то ее синхронизирующая мощность Рс равна нулю. Если момент и мощность машины равны нулю (θ = 0), то синхронизирующая мощность имеет максимальное значение.
Отношение наибольшей электромагнитной мощности к электромагнитной мощности двигателя в данном режиме называют перегрузочной способностью и обозначают
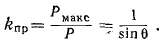 Полученное выражение показывает, что перегрузочная способность значительно уменьшается при возрастании угла θ. Поэтому при номинальном режиме внутренний угол θ обычно не превышает 30°.
Согласно равенству (5.8) синхронизирующая мощность обратно пропорциональна синхронному сопротивлению хd. Следовательно, для устойчивой работы желательно иметь xd возможно меньшим, для чего необходимо увеличить воздушный зазор. При увеличении зазора требуется большая м. д. с. возбуждения, что ведет к удорожанию машины. Обычно вопрос решают компромиссным путем и xd выбирают таким образом, чтобы kпр = 2÷2,5.
Пуск двигателя. В настоящее время пуск синхронных двигателей часто производят путем прямого включения. У двигателей, имеющих обмотку возбуждения, последняя замыкается на разрядное сопротивление или прямо на возбудитель. Для пуска в шихтованных полюсных наконечниках располагают короткозамкнутую пусковую обмотку, которая имеет такую же конструкцию, что и демпферная у генераторов. В некоторых случаях вместо пусковой обмотки делают массивные полюса или массивные полюсные наконечники, которые по торцам соединены медными короткозамыкающими кольцами, имеющими междуполюсные перемычки.
В результате взаимодействия токов стержней пусковой обмотки с магнитным потоком машины возникает асинхронный вращающий момент, который доводит ротор до околосинхронной скорости. При скольжении порядка 3÷5% за счет взаимодействия полюсов ротора и вращающегося магнитного потока, созданного обмоткой статора, двигатель скачком втягивается в синхронизм. У двигателей с обмоткой возбуждения при достижении околосинхронной скорости включают возбуждение.
В замкнутой обмотке возбуждения во время пуска наводится э. д. с, вызывающая ток, который имеет частоту скольжения s. Основную волну создаваемого им пульсирующего потока можно разложить относительно ротора на две вращающихся встречно волны. Скорость вращения п прямой волны относительно неподвижного статора равна синхронной. Она складывается из скорости п
вращения ротора и скорости n2 вращения волны относительно ротора, т. е.
 Скорость n3 вращения обратной волны относительно статора равняется разности этих скоростей:
 Независимо от величины скольжения прямовращающаяся волна потока вращается относительно статора с синхронной скоростью, она создает обычный асинхронный момент М1 (кривая 1, рис. 5.23).
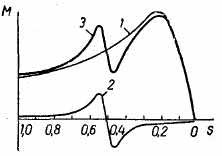 Рис. 5.23. Кривая моментов синхронного двигателя во время пуска
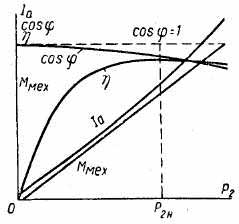 Рис. 5.24. Рабочие характеристики синхронного двигателя
Скорость п3 и направление вращения обратной волны зависят от скольжения. При s>0,5 скорость п3 имеет положительное значейие, обратная волна вращается в ту же сторону, что и синхронная и создает положительный асинхронный момент M2. При s<0,5 скорость п3 имеет отрицательное значение. В этом случае обратная волна вращается встречно по отношению к синхронной и создает отрицательный асинхронный момент. Таким образом, при s = 0,5 кривая зависимости момента М2 от скольжения меняет знак (кривая 2). Вследствие этого вращающий момент двигателя, равный сумме моментов M1 и М2, при скольжении s, близком к 0,5, имеет провал (кривая 3).
В явнополюсных синхронных машинах провал в кривой вращающего момента М возникает и при отсутствии обмотки возбуждения. Это объясняется тем, что в явнополюсных машинах для прохождения потока, создаваемого обмоткой статора, магнитная проводимость под полюсом и между полюсами неодинакова, что эквивалентно наличию некоторого пульсирующего относительно ротора потока, который можно разложить на прямовращающуюся и обратновращающуюся волны. В результате пересечения полей, создавае-
мых этими потоками, стержнями пусковой обмотки возникают асинхронные моменты М1 и М2. Поэтому при пуске явнополюсных двигателей, не имеющих обмотки возбуждения, также существует провал в кривой вращающего момента М при скорости вращения, близкой к полусинхронной.
Для снижения тока при пуске двигателей большой мощности напряжение на якоре уменьшают при помощи автотрансформатора или последовательно с обмоткой якоря включают реактор.
Рабочие характеристики. На рис. 5.24 представлены рабочие характеристики синхронного двигателя: Mмex, cosφ, Ia, η=f(Р2), где Р2 — полезная мощность.
Полезный момент Ммех пропорционален полезной мощности, так как двигатель вращается с постоянной скоростью. Если при холостом ходе установлен cosφ = 1, то при увеличении нагрузки коэффициент мощности несколько уменьшается. Изменение тока якоря отклоняется от прямолинейной зависимости за счет уменьшения cosφ.
Двигатели с обмотками (пусковой и возбуждения) имеют лучшие пусковые и рабочие характеристики, чем синхронные двигатели других типов. Они устойчиво работают, имеют высокие пусковой и рабочий моменты, к. п. д. и коэффициент мощности. Их к. п. д. и коэффициент мощости выше, чем у асинхронных двигателей. Синхронные двигатели с обмоткой возбуждения широко применяются в промышленных приводах и во многих случаях вытесняют асинхронные. Однако из-за сложности пуска и трудности размещения обмоток синхронные микродвигатели изготовляют без обмотки возбуждения. Такие двигатели не нуждаются в питании постоянным током и не имеют скользящих контактов, что обеспечивает их повышенную надежность. Кроме того, во время пуска они не требуют переключения обмотки возбуждения с реостата на источник постоянного тока, что значительно облегчает пуск.
ВОПРОСЫ
1. Как изменяется потребляемая двигателем из сети активная, реактивная мощности и вращающий момент при увеличении тока возбуждения? Почему при увеличении и при уменьшении тока возбуждения двигателя, работающего с cosφ = 1, увеличивается ток статора? Как можно изменить вращающий электромагнитный момент двигателя? Как изменяется внутренний угол 6 при переходе синхронной машины из генераторного режима в двигательный?
2. Как различается реакция якоря в двигательном и генераторном режимах? В чем заключается различие векторных диаграмм синхронной машины в генераторном и в двигательном режимах?
Содержание Главная (библиотека)
Предыдущий § Следущий
| 