|
Содержание Главная (библиотека)
Предыдущий § Следущий
§ 4.6. РАБОТА АСИНХРОННОЙ МАШИНЫ В РЕЖИМЕ ДВИГАТЕЛЯ
Определение мощностей, потерь и к. п. д. по круговой диаграмме. Измеряя отдельные отрезки круговой диаграммы (рис. 4.38), можно, с учетом принятых масштабов, определить мощность и потери асинхронного двигателя:
1. К обмотке статора подводится из сети первичная электрическая мощность
 2. Потери в намагничивающем контуре складываются из потерь Рс1 в стали статора и потерь Рэ0 в первичной обмотке от тока I0. Сумма этих потерь определяется активной составляющей тока I0.

3. При нагрузке возникают потери в обмотке статора, вызванные составляющей приведенного тока ротора
 4. В теории переменных токов доказывается, что линия электромагнитной мощности проходит через две точки, в которых электромагнитная мощность равняется нулю. Такими точками является точка синхронного хода H0 и точка Т, соответствующая бесконечной
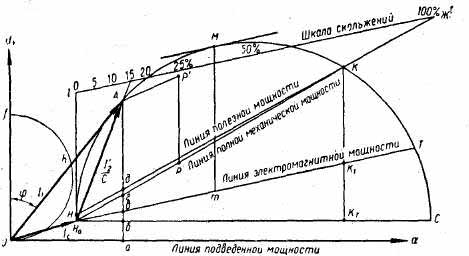 Рис. 4.38. Определение мощностей и моментов по круговой диаграмме
скорости вращения. Следовательно, Н0Т есть линия электромагнитной мощности. Поэтому электромагнитная мощность ротора, передаваемая ему от статора
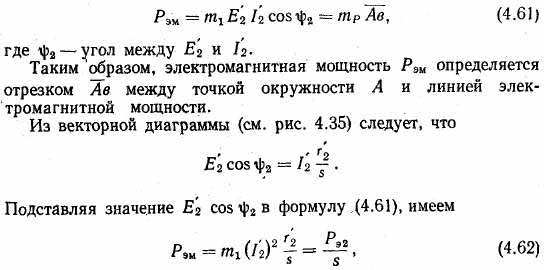
где Рэ2 — электрические потери в обмотке ротора;
Выражение электромагнитной мощности можно представать в следующем виде:
 или
 где Рм — мощность преобразуемая из электрической в механическую.
Линия, соединяющая точку синхронного хода Н0 с точкой К. короткого замыкания, называется линией полной механической мощности.)
 7. Часть полезной механической мощности тратится на покрытие механических Рмех и добавочных Рд потерь. Для их определения надо соединить прямой линией точки короткого замыкания К и холостого хода H, в которых полезная мощность двигателя равна нулю. Линия НК называется линией полезной мощности.
 Коэффициент полезного действия асинхронного двигателя
Значение к. п. д., определенное из этого выражения, не является достаточно точным, так как круговая диаграмма учитывает не все добавочные потери. Вообще графическое определение к. п. д. по круговой диаграмме является принципиально неточным, так как рабочие точки круговой диаграммы расположены на небольшой дуге.
Энергетическая диаграмма. Проследим уменьшение мощности асинхронного двигателя при последовательном прохождении точек абвг (см. рис. 4.38). Отложим от прямой АА (рис. 4.39) расстоя-
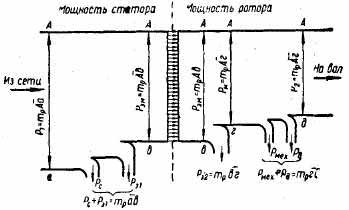 Рис. 4.39. Энергетическая диаграмма асинхронного двигателя
 Диаграмма рис. 4.39 является энергетической диаграммой асинхронного двигателя. Анализируя ее, можно наглядно представить баланс мощностей двигателя.
Электромагнитный момент. Поток, передающий электромагнитную мощность Рэм со статора на ротор, вращается с угловой частотой
С учетом формул (4.61), (4.41) и (4.38, а) электромагнитный момент равен
 Из выражения (4.64) следует, что электромагнитный момент пропорционален потоку машины и активной составляющей тока ротора.
Найдем уравнение электромагнитного момента, выраженного через параметры асинхронного двигателя. Пользуясь (4.62), можно написать
Подставляя (4.66) в (4.65), получаем
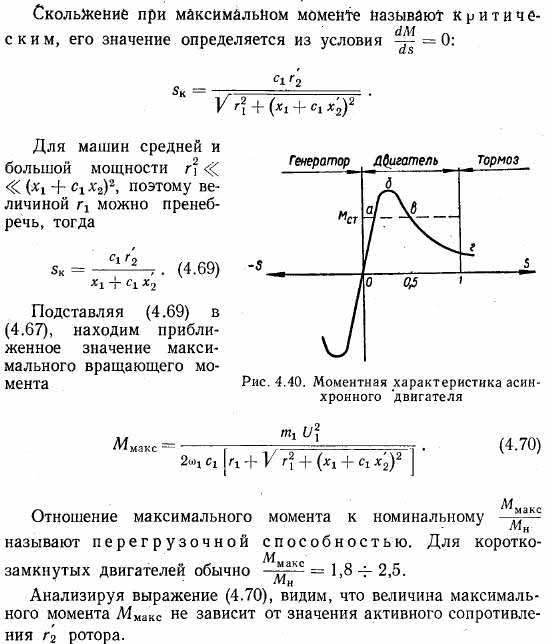
 Согласно (4.67) электромагнитный момент асинхронной машины является функцией скольжения s (рис. 4.40). При данном значении скольжения электромагнитный момент пропорционален квадрату напряжения U1 сети.
Подставляя в (4.67) s=1, находим выражение момента при неподвижном роторе
 Определение скольжения, моментов и коэффициента мощности по круговой диаграмме. Для определения номинального момента необходимо отыскать на круговой диаграмме точку номинального режима. Для этого перпендикулярно оси абсцисс Оα (см. рис. 4.38) в произвольной точке Р на линии Н0К откладывают отрезок
 Параллельно линии Н0К из точки Р' проводят прямую Р'А до пересечения с окружностью токов. Точка пересечения А яв-
ляется точкой номинального режима. Номинальный электромагнитный момент
 
Для определения максимального момента параллельно линии электромагнитной мощности Н0Т проводят в точке М касательную к окружности токов. Перпендикулярно к оси абсцисс из точки М проводят прямую Mm до пересечения с линией электромагнитной мощности Н0Т. Максимальный момент
 В начальный момент пуска скольжение s=1. Поэтому для определения пускового момента нужно из точки К привести перпендикулярно к оси абсцисс прямую KK1 до пересечения с линией электромагнитной мощности. Начальный момент
 Начальный момент в относительных единицах
 Однако для определения начального момента двигателя с ко-роткозамкнутым ротором круговой диаграммой обычно не пользуются, так как она не учитывает насыщения и вытеснения тока при пуске.
(см. рис. 4.34, в) длины вектора тока, отсекаемого этой полуокружностью, к диаметру равно коэффициенту мощности
 Использование круговой диаграммы для построения рабочих характеристик. Рабочий процесс двигателя изображается на круговой диаграмме небольшим отрезком окружности, соответствующим скольжению от нуля до номинального. Поэтому данные для рабочего режима из круговой диаграммы не могут быть найдены с достаточ-
 Рис. 4.41. Рабочие характеристики асинхронного двигателя
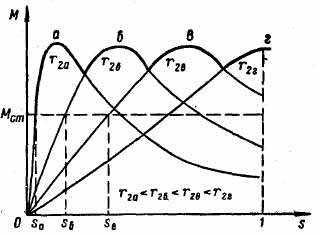 Рис. 4.42. Моментные характеристики при разных значениях активного сопротивления r2 в цепи ротора
ной точностью. Обычно по круговой диаграмме определяют для заданной мощности токи I1, I'2 и cosφ, а все остальные величины рассчитывают, пользуясь этими данными.
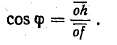
Круговая диаграмма может служить для ориентировочного расчета моментальной характеристики М = f (s) двигателя с фазным ротором в диапазоне скольжений s от 0 до 1. С помощью круговой диаграммы определяют приблизительное значение максимального момента Mмакс и критического скольжения sk. При приближенном анализе для построения характеристик двигателя в диапазоне от холостого хода до номинального режима по круговой диаграмме определяют обычно следующие величины: полезный момент М2, ток статора I1, скольжение s, к. п. д. η и коэффициент мощности соsφ. Зависимость этих величин от полезной мощности Р2 называют рабочими характеристиками. Рабочие характеристики асинхронных двигателей могут быть найдены из опыта, из расчета и по круговой диаграмме. В последнем случае задаются несколькими значениями мощности Р2 (от нуля до номинальной Рн) и определяют соответствующую точку круговой диаграммы, пользуясь выражением (4.71), в которое вместо номинального значения мощ-
 Из (4.72) видно, что скольжение пропорционально потерям в обмотке ротора. При синхронном ходе потери равны нулю. По мере увеличения нагрузки растут потери, а следовательно, согласно выражению (4.72), и скольжение s. На рис. 4.41 (кривая 5) видно, что при Р2=0 скольжение s принято равным нулю, в действительности при холостом ходе имеется некоторое, весьма незначительное скольжение.
Если бы скорость вращения двигателя была неизменной, то полезный момент М2 изменялся бы пропорционально мощности Р2. Учитывая формулу (4.48), можно записать
 Из этого выражения видно, что поскольку скольжение при увеличении Р2 растет, а пропорциональная зависимость нарушается, момент возрастает несколько быстрее (кривая 3 на рис. 4.41).
При синхронном ходе ток статора I1 равен IС. С увеличением тока ротора зависимость тока I1 от Р2 по мере нагрузки двигателя приближается к линейной (кривая 2 на рис. 4.41).
Намагничивающий ток, потребляемый двигателем из сети, не зависит от нагрузки, а активная составляющая тока I1 с ростом нагрузки увеличивается. Поэтому при малых нагрузках коэффициент мощности низок и растет с увеличением нагрузки. Отсюда ясно, что для обеспечения высокого коэффициента мощности сети асинхронные двигатели должны работать при нагрузке, близкой к номинальной. При больших скольжениях коэффициент мощности может несколько уменьшаться (кривая 4) за счет роста индуктивного сопротивления ротора x2s.
Пуск двигателя с фазным ротором. При увеличении активного сопротивления r2 ротора моментные характеристики, согласно (4.67), меняют свой вид (рис. 4.42). Максимальный момент остается неизменным, но смещается в сторону больших скольжений.
Если считать, что с1 = 1, то, подставляя в выражение (4.69) sk = 1, найдем, что максимальный момент будет пусковым при r'2 = хk. Для двигателей общепромышленного применения это равенство имеет место в случае, если в цепь обмотки ротора ввести добавочное активное сопротивление rд.
Для возможности введения в цепь ротора активного сопротивления двигатели выполняют с фазным ротором. Обмотка фазного ротора имеет такое же число фаз, как и статорная (обычно m2 = 3). Начала фаз обмотки ротора присоединяют к контактным кольцам, которые при пуске через щеточные контакты присоединяют к реостату, а при работе замыкают накоротко. В двигателях малых и средних мощностей применяются проволочные пусковые реостаты с воздушным или масляным охлаждением, в двигателях больших мощностей — водяные.
 При введении в цепь ротора активного сопротивления пусковой ток уменьшается, а пусковой момент увеличивается. Физически это объясняется тем, что хотя при введении активного сопротивления ток ротора уменьшается, его активная составляющая I2cosψ2 увеличивается, поэтому, согласно формуле (4.64), увеличивается и момент. Таким образом, при пуске двигателя с фазным ротором обеспечивается высокий момент при сравнительно небольшом токе.
Способы пуска короткозамкнутых двигателей. Современные мощные электрические сети обычно допускают прямое включение короткозамкнутых двигателей. Пусковые свойства асинхронных двигателей характеризуют кратность начального пускового момента
как двигатель развернется, обмотку статора быстрым переключением рубильника Р слева нанраво (рис. 4.43) соединяют в треугольник.
В некоторых случаях для уменьшения пускового тока последовательно со статором на время пуска включают реактор или автотрансформатор, при этом уменьшение пускового тока приблизительно пропорционально уменьшению напряжения, а уменьшение пускового момента пропорционально квадрату напряжения.
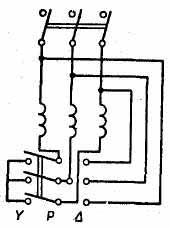 Рис. 4.43. Схема соединения обмотки статора, допускающая пуск двигателя с переключением со звезды на треугольник
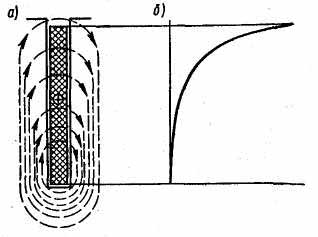 Рис. 4.44. Вытеснение тока в проводнике, находящемся в глубоком пазу: а — картина поля; б — распределение плотности тока по высоте проводника
Двигатель с глубоким пазом. В короткозамкнутом асинхронном двигателе активное сопротивление стержней ротора при пуске может быть увеличено за счет вытеснения тока, которое усиливается в случае применения глубокого паза. Вытеснение тока к поверхности ротора происходит из-за неодинакового индуктивного сопротивления рассеяния по высоте паза. На рис. 4.44, а линиями магнитной индукции показаны пути потоков пазового рассеяния проводника. Все эти потоки проходят под дном паза по стальному пакету (поскольку его магнитное сопротивление мало). Потоки рассеяния пересекают паз на разной высоте, вследствие чего их сцепление с проводником обмотки, определяющее индуктивное сопротивление, меняется по высоте паза; на дне индуктивное сопротивление наибольшее, в верхней части паза наименьшее. Поэтому большая часть тока проходит по верхней части паза, имеющей меньшее полное сопротивление, в результате чего плотность тока Δ по высоте паза различна (рис. 4.44, б). Следствием вытеснения тока является увеличение активного сопротивления проводника, что приводит к увеличению пускового момента. Интенсивность вытеснения тока зависит от отношения ширину к высоте паза и размеров его про-
рези. Одновременно с вытеснением тока происходит насыщение усика зубца у прорези паза.
Индуктивное сопротивление рассеяния обмотки ротора пропорционально скольжению, поэтому в начале пуска эффект вытеснения выражен наиболее заметно. При уменьшении скольжения вытеснение тока становится менее интенсивным и при номинальном скольжении практически отсутствует. Таким образом, при вращении
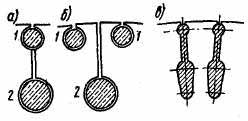 Рис. 4.45. Пазы ротора с двойной клеткой: а — пазы обеих клеток имеют общую прорезь; б — пазы каждой клетки имеют отдельные прорези; в — пазы для заливки алюминия
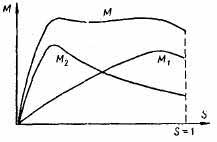 Рис. 4.46. Кривая вращающего момента двухклеточного двигателя
двигателя активное сопротивление обмотки ротора уменьшается. Действие вытеснения тока в стержнях глубокопазного двигателя эквивалентно введению в обмотку ротора пускового сопротивления, которое выводится автоматически по мере разгона двигателя. Отсутствие контактных колец, пусковых сопротивлений и переключающих устройств снижает стоимость глубокопазного двигателя по сравнению с фазным, повышает надежность его работы и облегчает эксплуатацию. В глубокопазном двигателе обеспечивается высокий момент в широком диапазоне скольжений и меньший пусковой ток.
 Двигатель с двойной клеткой. Значительный эффект дает использование двухклеточного ротора. В пазах 1 (рис. 4.45), размещенных по периферии поверхности ротора, закладывают стержни обычно небольшого сечения, имеющие высокое активное сопротивление. Индуктивность рассеяния этих стержней мала, так как они расположены неглубоко. Поэтому в начале пуска по ним проходит большой ток и создаваемый ими момент М1 (рис. 4.46) имеет максимум при скольжениях, близких к единице. Клетку, образуемую этими стержнями, называют пусковой.
В пазах 2 (рис. 4.45), размещенных дальше от поверхности ротора, закладывают стержни обычно большого сечения, имеющие небольшое активное сопротивление. Индуктивность рассеяния этих стержней велика. Поэтому в момент пуска, при большом скольжении, они имеют большое индуктивное сопротивление, и по ним про-
ходит малый ток. По мере разгона двигателя индуктивное сопротивление рассеяния оказывает меньшее влияние, в результате чего токи в клетках начинают перераспределяться соответственно активным сопротивлениям. Активное сопротивление стержней второй клетки мало, проходящий по ней ток велик и в результате создаваемый ею момент М2(рис. 4.46) при скольжении, близком к номинальному, большой. Таким образом, эта клетка обеспечивает высокий момент двигателя при номинальном режиме работы, поэтому ее называют рабочей. В настоящее время из технологических соображений двухклеточную обмотку ротора обычно выполняют путем заливки в пазы алюминия (см. рис. 4.45, в).
Момент двигателя складывается из моментов, создаваемых пусковой и рабочей клетками, и имеет достаточно высокое значение во всем диапазоне скольжений (см. рис. 4.46). Двигатель с двойной
 может устойчиво работать в диапазоне скольжений от 0 до критического sk.
У асинхронных двигателей обычного исполнения sk=0,l4÷0,15. Поэтому их зона устойчивой работы весьма незначительна. В системах автоматического регулирования применяют двигатели с повышенным активным сопротивлением ротора, у которых sk>l. Такие двигатели устойчиво работают во всем диапазоне скольжений от 0 до 1.
Двигатели с массивным стальным ротором. В случаях, когда не требуется быстродействия и необходимо иметь устойчивую работу в диапазоне скольжений от 0 до 1, применяются двигатели со сталь-
ным массивным ротором. Эти двигатели отличаются от обычных асинхронных лишь конструкцией ротора, который не имеет обмотки и представляет собой сплошной массивный цилиндр. Обмотку ротора заменяют контуры вихревых токов в массивных участках стали, которые вследствие вытеснения тока имеют большое активное сопротивление, в результате чего критическое скольжение sк>1. Глубина проникновения потока в тело массивного ротора зависит от частоты перемагничивания. При частоте токов ротора f2 = 1÷3 гц поток проникает в тело ротора на глубину до 20 мм, а при частоте 50 гц — всего до 2 мм. Малая глубина проникновения потока приводит к увеличению индукции на поверхностных участках ротора вследствие уменьшения сечения слоя, по которому проходит поток, поэтому значительно увеличивается намагничивающий ток двигателя.
Ротор имеет большое индуктивное сопротивление, так как поток рассеяния свободно замыкается по массиву. В результате повышенного намагничивающего тока и большого индуктивного сопротивления ротора двигатель имеет низкий coscp. Большие потери на вихревые токи и перемагничивание ротора снижают к. п. д. двигателя, поэтому двигатель с массивным ротором имеет более низкий cosφ и к. п. д., чем двигатели обычного исполнения.
Иногда с целью увеличения к. п. д. и вращающего момента при номинальном скольжении омедняют поверхность ротора. В некоторых случаях омедняют торцевую поверхность ротора или к торцам приваривают медные кольца.
Положительными свойствами двигателя с массивным ротором являются большой пусковой момент, устойчивая работа во всем диапазоне скольжений, простота устройства и надежность в работе.
Регулирование скорости вращения трехфазных двигателей. Трехфазные асинхронные двигатели обычно применяются для приводов, которые работают при постоянной скорости вращения, однако в некоторых случаях встречается необходимость ее изменения. Введением активного сопротивления в цепь обмотки ротора фазного двигателя можно регулировать скорость вращения в сторону ее уменьшения.
Рассмотрим регулирование скорости при Мст = const. При введении в цепь ротора регулировочного реостата ток двигателя, а следовательно, и его момент уменьшаются, в результате чего двигатель начинает тормозиться. Увеличение скольжения вызывает увеличение э. д. с. ротора и его тока до тех пор, пока не будет достигнуто прежнее значение момента при пониженной скорости вращения.
Если увеличить активное сопротивление цепи ротора от значения r2а до r2б, то моментная характеристика переходит с кривой а на кривую б (см. рис. 4.42). При этом скольжение двигателя, определяемое точкой пересечения моментной характеристики с прямой статистического момента Мст, увеличится от sa до sб. При увеличе-
нии сопротивления цепи ротора до r2в скольжение увеличится до sб и т. д. Этим способом можно осуществлять плавную регулировку скорости вращения до 70% синхронной. Недостаток способ — его неэкономичность, так как в регулировочном реостате имеются
большие потери энергии. Для регулирования скорости вращения запрещается пользоваться пусковыми реостатами, так как они не рассчитаны на длительную работу.
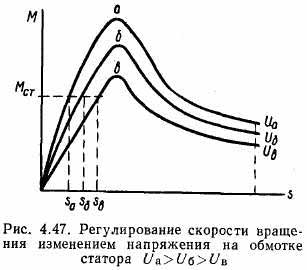
Изменять вид момент-ной характеристики можно понижением напряжения на обмотке статора. При этом, согласно выражения (4.67), М ≡ U2. Если при уменьшении напряжения моментная ха-рактеритика переходит с кривой а на кривую б, то скольжение двигателя увеличивается от sa до sб (рис. 4.47). Этот способ позволяет регулировать скорость вращения в диапазоне скольжения от 0 до критического sk. У двигателей обычного испол-
  Рнс. 4.48. Момент-ные характеристики двигателя с массивным стальным ротором при изменении напряжения
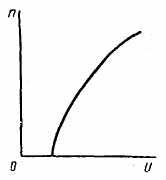 Рис. 4.49. Зависимость скорости вращения двигателя с массивным стальным ротором от напряжения сети
нения этим способом можно регулировать скорости вращения лишь в небольших пределах. С увеличением активного сопротивления ротора диапазон регулирования увеличивается.
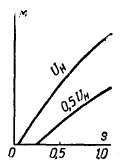
У двигателей с массивным ротором sk>l. При изменении напряжения существенно меняется их моментная характеристика
(рис. 4.48), в результате чего представляется возможным плавно регулировать скорость вращения практически от нуля до максимального значения (рис. 4.49). На рис. 4.48 характеристики начинаются не от нуля, а от скольжения при холостом ходе.
Скорость вращения асинхронного двигателя можно регулировать изменением скорости вращения поля статора, что осуществляется изменением частоты питающей сети или изменением числа полюсов. При изменении частоты питающей сети следует иметь в виду, что в этом случае пропорционально изменяются угловая частота со и индуктивные сопротивления x1 и х'2. Поэтому для сохранения момента двигателя при изменении частоты согласно (4.67) необходимо изменить подведенное напряжение U1. Недостатком этого способа регулирования является необходимость иметь специальный генератор с регулированием частоты и напряжения.
Асинхронный двигатель, допускающий переключение обмоток на различное число полюсов называется многоскоростным. Для возможности изменения числа полюсов обычно каждую фазу обмотки статора делят на две одинаковые части, которые включают последовательно или параллельно (рис. 4.50). В некоторых случаях выполняют отдельные обмотки на разные скорости вращения. Ротор многоскоростного двигателя делают короткозамкнутым, так как в этом случае не требуется переключения числа полюсов на обмотке ротора. Многоскоростные двигатели выпускаются на две, три и четыре скорости вращения. При этом в пазах статора могут быть заложены одна или две раздельные обмотки. Недостатком многоскоростных двигателей является уменьшение мощности при тех же габаритных размерах и повышенная стоимость.
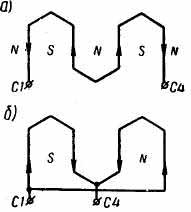 Рис. 4.50. Регулирование скорости вращения изменением числа полюсов обмотки статора: а—2р=4; б—2р=2
ВОПРОСЫ
1. Каким образом в асинхронной машине создается вращающий момент? Как зависит вращающий момент от величины напряжения и частоты сети? Почему при введении в цепь ротора активного сопротивления во время пуска ток асинхронного двигателя уменьшается, а момент увеличивается?
2. По каким данным можно построить круговую диаграмму? Как, пользуясь круговой диаграммой, можно определить токи и моменты для различных нагрузок асинхронного двигателя?
3. Как изменится скольжение асинхронного двигателя при увеличении активного сопротивления обмотки ротора? При каких скольжениях практически имеет место вытеснение тока? Отчего зависит устойчивая работа двигателя?
Содержание Главная (библиотека)
Предыдущий § Следущий
| 