|
Содержание Главная (библиотека)
Предыдущий § Следущий
§ 4.5. АСИНХРОННАЯ МАШИНА ПРИ ВРАЩЕНИИ РОТОРА
Направление вращения ротора. Вращающийся поток, создаваемый током обмотки статора, индуктирует в проводниках обмотки ротора э. д. с. Если обмотка ротора замкнута, проходящий по ней ток взаимодействует с магнитным полем машины, вследствие чего возникает электромагнитная сила fa, стремящаяся повернуть ротор и статор в противоположные направления.
Определим направление действия электромагнитной силы. На рис. 4.32, а линиями магнитной индукции условно показан поток, создаваемый обмоткой статора. Направление вращения потока показано стрелкой п. При вращении магнитный поток пересекает проводники обмотки ротора и наводит в них э. д. с. Обмотка ротора замкнута, поэтому э. д. с. вызывает ток (рис. 4.32, б). Пользуясь правилом левой руки, определяем, что электромагнитная сила fa направлена в сторону вращения потока статора (рис. 4.32, а и
в). Если момент сопротивления меньше момента вращения, то ротор начинает вращаться (магнитный поток как бы увлекает за собой ротор).
Магнитный поток проходит в основном по стальным зубцам. Поэтому электромагнитные силы, поворачивающие ротор, действуют не непосредственно на проводники обмотки, а на зубцы ротора.
Электродвижущая сила и сопротивления обмотки ротора. При вращении ротор асинхронного двигателя отстает от магнитного
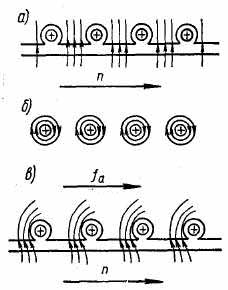 Рис. 4.32. Возникновение электромагнитного вращающего момента: а — поток статора и индуктируемые им э. д. с. ротора; б — поле, создаваемое токами обмотки ротора; в — направление электромагнитной силы
потока статора. Величина, характеризующая отставание вращающегося ротора от потока статора, называется скольжением:
 Обычно у двигателей общего применения при номинальном режиме скольжение s = 0,02÷0,04. У мощных двигателей скольжение еще меньше (порядка 0,01). Следовательно, скорость вращения асинхронных двигателей общего применения близка к синхронной.
Скорость вращения потока статора относительно вращающегося ротора равна
 С учетом формул (4.44) и (4.43) частота э. д. с. и тока ротора
 Частота f 2 и скорость n2 являются частотой и скоростью скольжения. Согласно (4.38,а) и (4.45) э. д. с, индуктируемая в обмотке ротора при скольжении s, равна
 Индуктивное сопротивление обмотки ротора при скольжении
 Если не учитывать вытеснения тока, активное сопротивление ротора не зависит от скольжения, т. е.
 Магнитодвижущие силы обмоток ротора и статора. Из выражения (4.44) следует, что скорость вращения ротора относительно неподвижного статора
 Скорость вращения м. д. с. ротора относительно неподвижного статора равна сумме скоростей вращения м. д. с. относительно ротора и вращения ротора относительно статора

Из (4.49) следует, что м. д. с, создаваемая обмоткой ротора, вращается в ту же сторону и с той же скоростью, как и м. д. с. статора. Поэтому м. д. с. обмоток ротораи статора неподвижны друг относительно друга. В результате этого оказывается возможным их постоянное взаимодействие при любом скольжении s, благодаря чему при вращении асинхронной машины сохраняется равенство (3.4).
Синхронное вращение, генераторный и тормозной режимы. Если при помощи внешнего приводного двигателя увеличить скорость вращения асинхронной машины, то ее скольжение уменьшается, а поэтому уменьшаются э. д. с. и ток обмотки ротора. Это в свою очередь приводит к уменьшению электромагнитного вращающего момента. При достижении синхронной скорости вращения скольжение s равно нулю. В этом случае обмотка ротора и поток машины неподвижны относительно друг друга. В результате в обмотке ротора не индуктируется э. д. с. и нет тока, поэтому машина не развивает вращающего момента.
Если скорость вращения ротора увеличить выше синхронной, то скольжение s становится отрицательным, а проводники обмотки ротора пересекают поток в обратном направлении, так как теперь они вращаются быстрее потока. Поэтому э. д. с, индуктируемая в проводниках, а следовательно, и ток ротора, меняют направление на обратное. Вследствие этого электромагнитный момент на валу машины становится тормозным, и асинхронная машина переходит в генераторный режим, отдавая в сеть активную мощность. Намагничивающий ток Iμ, необходимый для создания магнитного потока, как и в двигательном режиме, поступает из сети в обмотку статора.
Асинхронная машина может работать в генераторном режиме изолированно от общей питающей сети, что оказывается возможным при включении параллельно обмотке статора статических конденсаторов С (рис. 4.33). В этом случае вследствие остаточного магнетизма при вращении ротора может начаться процесс самовозбуждения асинхронного генератора.
При неподвижном роторе скольжение s = 1. Если ротор асинхронного двигателя вращать в сторону, противоположную направлению момента, то скольжение s становится больше единицы. В этом случае момент, создаваемый асинхронным двигателем, направлен против вращения. Такой режим называется тормозньим. Обычно при тормозном режиме в цепь фазного ротора включают реостат. В этом режиме энергия расходуется только на нагрев обмоток
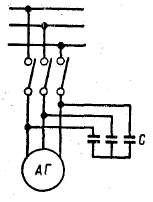 Рис. 4.33. Схема соединения асинхронного генератора с самовозбуждением
и реостата при его включении в цепь ротора. Основным режимом работы асинхронной машины является двигательный.
Таким образом, асинхронная машина работает при l>s>0 в двигательном режиме, при 0>s> —∞ в генераторной режиме и при ∞>s>l в режиме электромагнитного тормоза.
Системы уравнений, векторная диаграмма, схема замещения. Системы уравнений (3.8, в) и (3.9, в) для короткозамкнутой асинхронной машины при вращении ротора с учетом уравнений (4.39) — (4.47) имеют следующий вид:
 где хms — сопротивление намагничивающего контура, отнесенное к обмотке ротора.
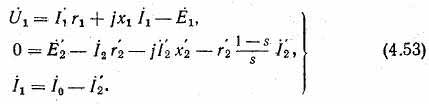
 Уравнения контура ротора, имеющего частоту f2, обычно приводят к частоте f1 питающей сети. Для этого согласно (4.45) вторые уравнения систем (4.50) и (4.51) следует разделить на скольжение s. Тогда учитывая, что
 имеем:
 и
 Системам уравнений асинхронной машины при вращении ротора (4.52) и, (4.53) соответствует схема замещения (рис. 4.34, а), которую часто называют Т-образной. Аналогично схеме замещения трансформатора (см. рис. 3.10, б) в цепь намагничивания схемы замещения асинхронной машины (рис. 4.34,
а) включено сопротив-
ление rт, учитывающее потери мощности в контурах стали магнитопровода.
Системе уравнений (4.52) соответствует векторная диаграмма (рис. 4.35).
Сравнивая системы уравнений, схемы замещения и векторные диаграммы при вращении и при неподвижном роторе асинхрон-
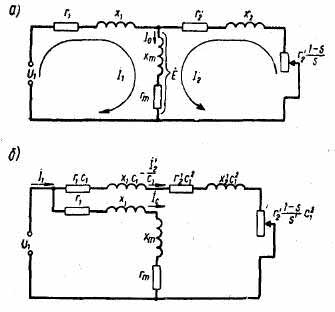 Рис. 4.34. Схема замещения асинхронного двигателя: а — нормальная (Т-образная); б — с вынесенным намагничивающим контуром (Г-образная)
 Схема замещения с вынесенным намагничивающим контуром.
При анализе процессов в асинхронной машине удобнее пользоваться схемой замещения, в которой намагничивающий и рабочий контуры, соединены параллельно. Для получения такой схемы определим из схемы, представленной на рис. 4.34, а, токи асинхронной машины:
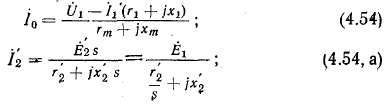
 Введем обозначение
 В практических расчетах при определении коэффициента с1 обычно пренебрегают активными сопротивлениями, т. е. принимают
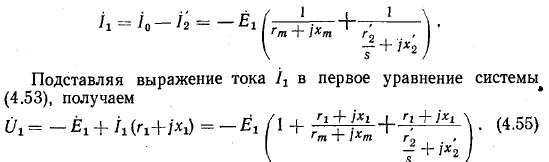
 Из (4.55) с учетом (4.56, а) имеем
 Подставляя последнее выражение в (4.54, а), получаем для приведенного тока ротора
 С учетом выражений (4.54) и (4.57) получаем
 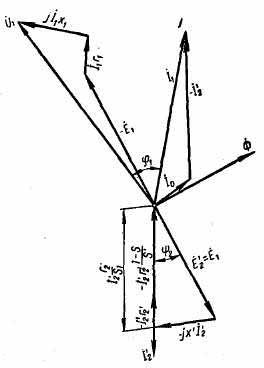
Рис. 4.35. Векторная диаграмма асинхронного двигателя
откуда
 где Iс — ток синхронного вращения.
Уравнению (4.58) соответствует схема замещения, приведенная на рис. 4.34, б, в которой намагничивающий контур вынесен на первичные зажимы. Такую схему называют Г-образной.
Круговая диаграмма. Как видно из уравнений (4.58) и схемы замещения (рис. 4.34, б), асинхронная машина может быть представлена двумя независимыми друг от друга ветвями — рабочего и намагничивающего контуров, которые присоединены параллельно
 терями в стали и в первичной оомотке, а индуктивная составляющая определяется током намагничивания.
Ветвь рабочего контура содержит постоянное индуктивное сопротивление и переменное активное, которое зависит от скольжения s. Из теории переменных токов известно, что геометрическим местом конца вектора тока такой цепи является окружность (рис. 4,36, б), диаметр которой равен отношению напряжения к индуктивному сопротивлению. Согласно второму члену уравнения (4.58) диаметр окружности для приведенного тока ротора равен
 Диаметр круга тока, выраженный в мм, равен
 где mI — масштаб тока, а/мм.
Масштаб тока удобно выбирать таким образом, чтобы D равнялся 150÷200 мм.
 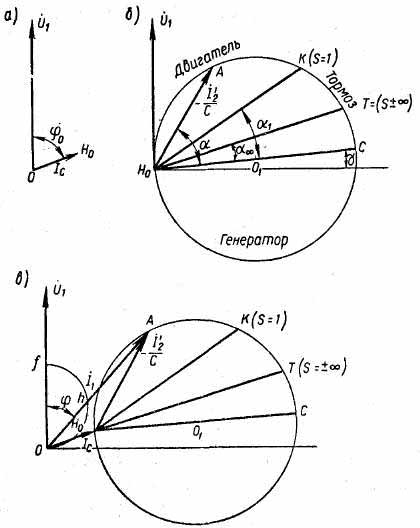 Рис. 4.36. Построение круговой диаграммы асинхронной машины: а — векторная диаграмма контура намагничивания; б — векторная диаграмма рабочего контура; в — круговая диаграмма асинхронной машины
перемещается вверх от точки H0. При неподвижном роторе (s = 1) концом вектора тока является точка К, ее называют точкой короткого замыкания, так как она соответствует режиму короткого замыкания асинхронного двигателя. При теоретической бесконечно большой скорости вращения ротора (s = ± ∞) концом вектора тока является точка Т.
 Построение круговой диаграммы по данным опыта холостого хода и короткого замыкания. Если расчетные значения сопротивлений асинхронной машины неизвестны, то можно приближенно провести построение круговой диаграммы по двум опытным точкам: точке холостого хода Н, полученной из опыта холостого хода, и точке короткого замыкания К, полученной из опыта короткого замыкания. При этом пренебрегают различием между током синхронного хода Iс и действительным током холостого хода I0 и принимают угол поворота γ диаметра окружности равным 0,
Опыт холостого хода производится при вращающемся асинхронном двигателе без нагрузки на валу. Принимается, что в этом случае ток I0 двигателя практически равен току синхронного хода Iс. Опыт производится при номинальном напряжении Uн. Измеряют ток I0 и мощность Р0. По данным опыта определяют угол φ0 из условия
 Опыт короткого замыкания производится при неподвижном роторе. Вначале двигатель подключают на напряжение, равное 15÷20% номинального, а затем напряжение поднимают до номинального и быстро производят измерение тока Iк и мощности Рк. По данным опыта определяют активное сопротивление короткого замыкания rк и угол φк:
Из точки Н параллельно оси абсцисс 0α, проводят линию HC. Из середины прямой НК проводят перпендикуляр MO1. Точка пересечения перпендикуляра с прямой НС является центром окружности токов диаграммы. Положение на диаграмме точки T определяют по tgα∞ = сr1, где с — коэффициент пропорциональности. Так как для точки К tgα1 = сrк, то получаем
 Отрезок КК2 делят пропорционально r1 и rк. Через точку K1 проводят прямую НК1. Ее пересечение с окружностью токов определяет положение точки Т. Сопротивление r1 определяют измерением на постоянном токе. Сопротивление rк находят из опыта короткого замыкания.
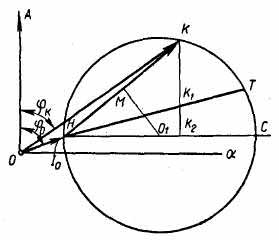 Рис. 4.37. Построение круговой диаграммы по опытным данным
ВОПРОСЫ
1. Как можно изменить направление вращения асинхронного двигателя? Как изменится направление вращения двигателя, если одновременно к поочередно поменять местами все три питающие выводы обмотки статора?
2. С какой скоростью м. д. с. обмоток статора и ротора вращаются относительно статора? С какой скоростью м. д. с. обмоток статора и ротора вращаются относительно ротора?
3. Какому режиму соответствует скольжение s=0? Почему при s=0 асинхронная машина не развивает вращающего момента?
4. В каких участках стали возникают потери асинхронного двигателя при неподвижном роторе, синхронном вращении, номинальном режиме?
5. В чем состоит различие между схемами замещения и векторными диаграммами асинхронной машины и трансформатора? Какой вид имеет векторная диаграмма роторной цепи асинхронного двигателя при скольжении s=0? Каким образом в схеме замещения асинхронного двигателя учитывается механическая нагрузка на валу машины? Какому режиму трансформатора соответствует схема замещения асинхронного двигателя при нагрузке?
6. Какие преобразования должны быть сделаны, чтобы представить вращающийся асинхронный двигатель электрической схемой замещения? Каким путем осуществляются связи между контурами статора и ротора асинхронного двигателя и какие связи имеют место в схеме замещения? Что означает приведение обмотки ротора к обмотке статора? Какой физический смысл имеет деление членов уравнения обмотки ротора на скольжение s? Чем отличается Т-образная схема замещения от Г-образной?
7. Что изменится на круговой диаграмме при уменьшении напряжения статора, активного сопротивления статора, активного сопротивления ротора, индуктивного сопротивления ротора?
Содержание Главная (библиотека)
Предыдущий § Следущий
| 