|
Содержание Главная (библиотека)
Предыдущий § Следущий
§ 2.7. ДВИГАТЕЛИ
Назначение. Двигатели постоянного тока в основном используются в приводах, требующих регулирования скорости вращения в широком диапазоне. Двигатели имеют большой пусковой момент и могут быть выполнены практически на любую допустимую по механическим соображениям скорость вращения. Их достоинством является возможность экономичного и плавного регулирования.
Недостатки двигателя постоянного тока по сравнению с другими типами двигателей связаны с применением коллектора. Искрение, сопровождаемое подгоранием коллектора, и непостоянство щеточного контакта приводит к нестабильности характеристик и является источником радиопомех. Щеточная пыль загрязняет двитель, что требует систематического ухода.
В системах автоматического регулирования микродвигатели постоянного тока широко используются в качестве исполнительных двигателей.
Уравнение напряжения и моментов. Если к щеткам машины постоянного тока подвести напряжение U от внешней сети, то по обмотке якоря пойдет ток Iа. В результате взаимодействия проводников с током якоря и магнитного потока машины возникает электромагнитная сила fa (рис. 2.54). Магнитный поток в основном проводит по зубцам, и только незначительная его часть по пазам, поэтому сила fa действует не на находящийся в пазу проводник, а на сталь зубцов якоря. Действие электромагнитных сил, создаваемых всей обмоткой якоря, вызывает вращающий момент, стремящийся повернуть якорь.
При вращении якоря проводники его обмотки пересекают магнитный поток машины, в результате чего в обмотке якоря двигателя (так же как и генератора) наводится э. д. с. вращения. В двигательном режиме э. д. с. направлена противоположно току якоря. Поэтому ее называют противо э.д.с.
Согласно второму закону Кирхгофа

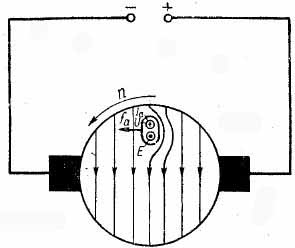
Рис. 2.54. Напряжение и э. д. с. проводника обмотки якоря в двигательном режиме
Выражение (2.25) называют уравнением напряжений двигателя. В переходных режимах уравнение принимает вид

Уравнение (2.25, а) показывает, что в двигательном режиме в любой момент времени напряжение сети уравновешивается противо э. д. с. и падениями напряжения в якоре.
Вследствие того, что ток в двигательном режиме имеет направление, противоположное тому, какое он имел в генераторном режиме, электромагнитный момент также меняет направление действия. В генераторном режиме электромагнитный момент является тормозным, в двигательном — вращающим. При вращении якоря в случае отсутствия нагрузочного момента на якорь действует момент сопротивления вращению M0, который называется моментом холостого хода.
При нагрузке на вал двигателя действует механический момент Ммех, тормозящий вращение. Оба эти момента уравновешиваются электромагнитным моментом М двигателя:
Это уравнение показывает, что электромагнитный момент двигателя всегда уравновешивается моментами нагрузки, холостого хода и динамическим. Выражения (2.26), (2.26, а) и (2.26, б) называются уравнениями равновесия моментов двигателя.
Условия статической устойчивости. Если двигатель работает с постоянной скоростью вращения, то динамический момент Mj равен нулю. Иначе говоря, при работе двигателя с постоянной скоростью вращения необходимо соблюдение равенства (2.26, а). При изменении одного из моментов начинается переходный электромеханический процесс, в результате чего меняется скорость вращения.
Для устойчивой работы двигателя необходимо, чтобы
 Это условие выполняется для случая изменения моментов М и Мст, представленных кривыми на рис. 2.55, а, и не выполняется
для кривых, представленных на рис. 2.55, 6. Действительно, при случайном уменьшении скорости вращения, например, от n до п1, равенство (2.26, б) нарушается, и согласно кривым моментов (рис. 2.55, а) М>Мст. Это приводит к увеличению скорости, пока не наступит равновесие М=Мст. Из графика следует, что процесс вернется в точку пересечения кривых, т. е. установится прежняя скорость п. Аналогично этому при случайном повышении скорости, например до значения n2 согласно кривым рис. 2.55, а, М>Мст. Вследствие этого скорость вращения начинает уменьшаться до тех пор, пока не наступит равновесие М = Мст и установится прежняя
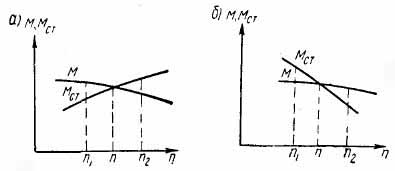
Рис. 2.55. Характеристики момента: а — при устойчивой работе; б — при неустойчивой работе
скорость вращения п. Если же соотношение моментов определяется кривыми рис. 2.55, б, то при случайном уменьшении скорости, например до n1, М<Мст. Вследствие этого будет продолжаться дальнейшее уменьшение скорости, что в свою очередь приводит к добавочной разности между моментами, в результате чего машина остановится. При случайном увеличении скорости вращения, например до п2, М>Мст, и скорость вращения прогрессивно увеличивается. В этих двух случаях устойчивая работа двигателя невозможна.
Пуск. Для создания максимального момента при пуске двигателя сопротивление в цепи параллельной обмотки возбуждения должно быть полностью выведено. Двигатель может быть включен прямо в сеть, однако при этом возникает большой пусковой ток. В начале пуска Е = 0, поэтому согласно выражению (2.25, а) пусковой ток
 Вследствие большого значения пускового тока может возникнуть круговой огонь на коллекторе, осложнится работа защитной и измерительной аппаратуры, возникнет большой ударный момент на валу и большое падение напряжения в сети. Для ограничения тока последовательно с якорем включают пусковой реостат
(рис. 2.56), имеющий сопротивление rд. В этом случае начальное значение пускового тока
 В первый момент времени ручка передвижного контакта реостата должна соприкасаться с зажимом 1. Сопротивление rд реостата выбирается таким образом, чтобы наибольший ток Iнб≤2Iн. По мере разгона двигателя пропорционально скорости вращения n
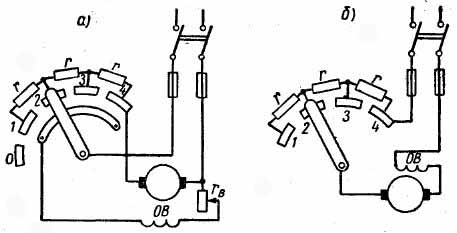 Рис. 2.56. Включение пускового реостата: а — двигатель с параллельным возбуждением; б — двигатель с последовательным возбуждением
увеличивается противо э. д. с. Е, в результате чего уменьшается пусковой ток. Его значение, согласно (2.25, а), в этом случае определяется выражением
 На рис. 2.57 время разгона двигателя при положении 1 ручки реостата определяется отрезком 01. В течение этого промежутка времени скорость вращения п и пропорциональная ей противо э. д. с. Е увеличиваются по кривой 01' до значения, определяемого ординатой точки 1'. Так как противо э. д. с. возрастает, то ток Iа уменьшается со значения Iнб до Iнм (кривая 0"1").
Когда ток двигателя снизится до наименьшего значения Iнм, ручку пускового реостата переключают из положения 1 в положение 2. Сопротивление реостата при соединении регулировочной ручки с зажимом 2 (см. рис. 2.56) подобрано таким образом, чтобы ток в первый момент, после переключения увеличивался до значения Iнб. По мере разгона двигателя э. д. с. увеличивается по кривой 1""2 (рис. 2.57), а ток уменьшается по кривой 1"2". После
того как ток уменьшится до значения Iнм, ручку реостата переклечают в положение 3. Время, в течение которого ручка реостата находится в положении 2, определяется отрезком 1—2. Обычно реостат имеет всего две-четыре ступени. После выведения сопротивления последней ступени реостата наступает установившийся режим.
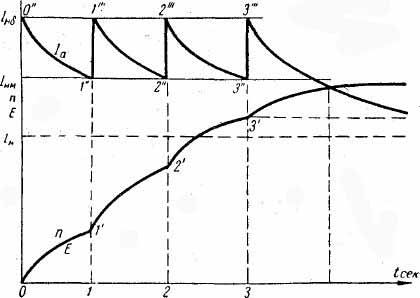 Рис. 2.57. Изменение тока, скорости вращения и э. д. с. двигателя при реостатном пуске
Микродвигатель обычно включают прямо в сеть без пусковых реостатов.
Способы регулирования скорости и изменения направления вращения. Подставляя в (2.28) выражение Е по (2.4, а) и решая уравнение относительно скорости вращения, получаем
 Из (2.29) следует, что скорость вращения двигателя можно регулировать следующими способами:
1) изменением тока возбуждения, в результате чего изменяется поток Ф;
2) изменением величины добавочного сопротивления rд в цепи якоря;
3) изменением напряжения U сети.
Согласно правилу левой руки для изменения направления вращения двигателя необходимо изменить направление тока в якоре или тока возбуждения. При одновременном изменении направления обоих токов направление вращения двигателя не изменяется.
Регулирование скорости вращения изменением тока возбуждения. Изменяя сопротивление rв реостата в цепи возбуждения, можно изменять ток Iв возбуждения (рис. 2.58). Для удобства анализа примем, что при этом напряжение U сети остается неизменным.
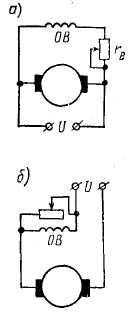 Рис. 2.58. Регулирование реостатом тока в обмотке возбуждения: а — двигатель с параллельным возбуждением; б — двигатель с последовательным возбуждением
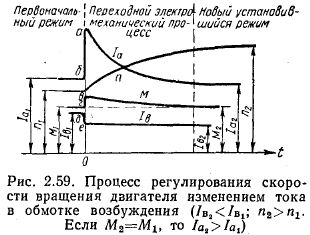 тиво э. д. с, в результате ток Iа спадает и момент М уменьшается. Процесс увеличения скорости вращения двигателя и уменьшения момента происходит до тех пор, пока момент М не становится равным моменту нагрузки Мст, после чего переходный процесс заканчивается.
На рис. 2.59 представлен случай, когда моменты в начале и в конце процесса равны, т. е. M1 = М2 — Мст. Момент двигателя в первоначальном и в конечном установившемся режимах один и тот же (М = СмIаФ = const), а поток Ф в конечном режиме уменьшается, поэтому при новом установившемся режиме Iа2>Iа1.
Этот способ является вполне экономичным, так как регулирование производится малым током Iв, и потери в реостате цепи воз-
буждения невелики. Однако этим способом регулируют скорость вращения в основном лишь в сторону увеличения.
Имеются двигатели, у которых допускается уменьшение скорости вращения на 15—20%.
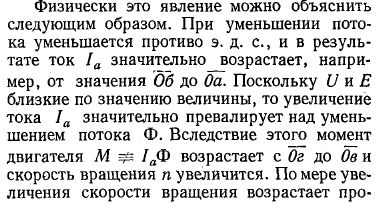
Регулирование скорости вращения изменением добавочного сопротивления в цепи якоря. При введении добавочного сопротивления rд в цепь якоря, согласно (2.29), скорость вращения двигателя уменьшается. Физически это явление можно объяснить следующим
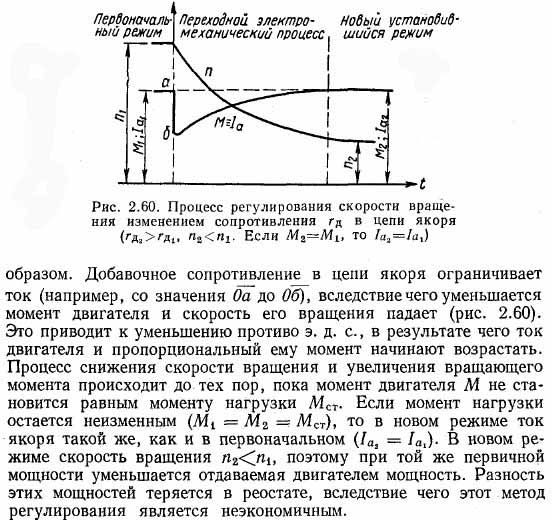 Регулирование скорости вращения изменением приложенного к якорю напряжения. Согласно (2.29) при увеличении напряжения U на якоре скорость вращения двигателя возрастает. Физически это явление можно объяснить следующим образом. В первый момент времени увеличение напряжения приводит к возрастанию тока Iа, а следовательно, и электромагнитного момента М (рис. 2.61), например, со значения О-б- до О-а-. Поэтому скорость вращения и пропорциональная ей противо э. д. с. увеличиваются, вследствие чего ток Iа якоря начинает уменьшаться.
Процесс увеличения скорости вращения и уменьшения тока якоря длится до тех пор, пока момент двигателя М не становится равным статическому моменту сопротивления Мст. На рис. 2.61 представлен процесс при независимом возбуждении двигателя для случая, когда M1=M2=Мст. При новом установившемся режиме Ia2 = Ia1, a n2>n1. Этот способ регулирования часто применяется
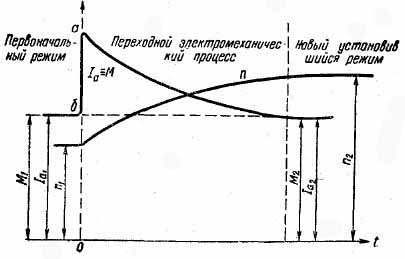 Рис. 2.61. Процесс регулирования скорости вращения изменением напряжения питания
в автоматике для регулирования скорости вращения исполнительных двигателей.
Схема регулирования скорости вращения «генератор — двигатель». Для регулирования скорости вращения применяют специальные схемы питания двигателя. В случае, когда, двигатель питают отдельным генератором, удобно соединить якори обеих машин накоротко (рис. 2.62). Такая схема называется «генератор — двигатель». С одним концом вала приводного двигателя (дизельного, синхронного или асинхронного) соединен генератор постоянного тока Г, с другим — возбудитель В, который питает обмотки возбуждения генератора Г и двигателя постоянного тока Д. Вал двигателя Д соединен с валом исполнительного механизма ИМ.
Изменяя сопротивления регулировочных реостатов генератора (rвг) и двигателя (rвд), можно экономично изменять скорость вращения двигателя в широких пределах, зависящих от величины нагрузки. В среднем диапазон регулирования скорости вращения можно считать равным 1:10. Изменяя при помощи переключателя П полярность на якорях машины, можно изменять направление вращения двигателя.
Часто для сглаживания пиков и толчков нагрузки на вал приводного двигателя ПД насаживают маховик М, который запасает энергию и отдает ее при резком переходе к большим нагрузкам.
Сглаживающее действие маховика настолько велико, что мощность приводного двигателя ПД в некоторых случаях может быть меньше мощности двигателя Д. Это, например, практикуется в приводах к прокатным станам.
Регулировочная характеристика. Регулировочная характеристика представляет зависимость скорости вращения п от тока Iв
 Рис. 2. 62. Схема «генератор—двигатель» для регулирования скорости вращения
возбуждения в случае, если ток Iа якоря и напряжение U сети остаются неизменными, т. е. n=f(Iв) при Ia=const и U=const.
До тех пор, пока сталь магнитопривода машины не насыщена, поток Ф изменяется пропорционально току возбуждения Iв. В этом
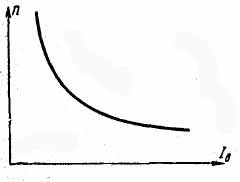 Рис. 2.63. Регулировочная характеристика двигателя
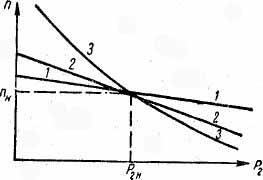 Рис. 2.64. Скоростные характеристики
случае, согласно. (2.29), регулировочная характеристика является гиперболической. По мере насыщения при больших токах Iв характеристика приближается к линейной (рис. 2.63). При малых значениях тока Iв скорость вращения резко возрастает. Поэтому при обрыве цепи возбуждения двигателя (Iв = 0) с параллельным возбуждением скорость его вращения достигает недопустимых пределов, как говорят: «Двигатель идет вразнос». Исключение могут составлять микродвигатели, которые имеют относительно большой момент М0 холостого хода.
В двигателях последовательного возбуждения Iв = Iа. При малых нагрузках ток якоря Iа мал и скорость вращения может быть слишком большой, поэтому пуск и работа при малых нагрузках недопустимы. Микродвигатели так же, как и. в предыдущем случае, могут составлять исключение.
Скоростные характеристики. Скоростные характеристики дают зависимость скорости вращения п от полезной мощности Р2 на валу двигателя в случае, если напряжение U сети и сопротивление rв регулировочного реостата цепи возбуждения остаются неизменными, т. е. n=f(P2), при U=const и rв = const.
С возрастанием тока якоря при увеличении механической нагрузки двигателя параллельного возбуждения одновременно уменьшаются числитель и знаменатель выражения (2.29). Числитель уменьшается вследствие увеличения падения напряжения в якоре, знаменатель — из-за реакции якоря, которая обычно действует размагничивающим образом. Первая причина стремится уменьшить скорость вращения двигателя, вторая — увеличить. Действие падения напряжения в якоре обычно оказывает большее влияние. Поэтому скоростная характеристика двигателя параллельного возбуждения имеет слегка падающий характер (кривая 1, рис. 2.64).
В двигателе последовательного возбуждения ток якоря является током возбуждения. Поэтому с изменением нагрузки меняется поток Ф и, следовательно, знаменатель (2.29). В результате скоростная характеристика двигателя с последовательным возбуждением имеет характер, близкий к гиперболическому. При увеличении нагрузки по мере насыщения магнитной цепи характеристика приобретает более прямолинейный характер (кривая 3 на рис. 2.64).
В компаундном двигателе при согласном включении обмоток скоростная характеристика занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения (кривая 2).
Изменение скорости вращения двигателя при переходе от номинальной нагрузки к холостому ходу называется номинальным изменением скорости
 где nн — скорость вращения при номинальном режиме;
n0 — скорость вращения при холостом ходе.
Обычно для мощных двигателей с параллельным возбуждением Δn=1÷2%, для микродвигателей — 5÷15%. В двигателях с последовательным возбуждением нельзя снижать нагрузку до холостого хода, поэтому у них под n0 следует понимать скорость вращения при нагрузке, составляющей 25% номинальной.
Моментные характеристики. Моментные характеристики показывают, как изменяется момент М при изменении полезной мощности Р2 на валу двигателя, если напряжение U сети и сопротивление rв
регулировочного реостата в цепи возбуждения остаются неизменными, т. е. М = f(P2), при U=const, rв=const.
Полезный момент на валу двигателя
 Если скорость вращения двигателя параллельного возбуждения не изменялась бы с нагрузкой, то зависимость момента Ммех от полезной мощности графически представляла бы прямую линию, проходящую через начало координат. В действительности скорость вращения с увеличением нагрузки падает. Поэтому ха-
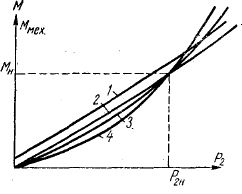 Рис. 2.65. Моментные характеристики
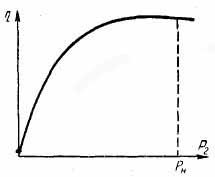 Рис. 2.66. Изменение к. п. д. двигателя
рактеристика полезного момента несколько загибается кверху (кривая 2, рис. 2.65). Согласно (2.26) кривая электромагнитного момента М проходит выше кривой полезного момента Ммех на постоянную величину, равную моменту холостого хода М0 (кривая 1).
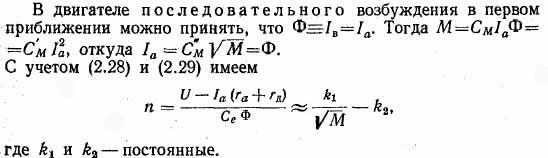
В двигателе последовательного возбуждения скоростная характеристика близка к гиперболической. Поэтому согласно (2.31) вид его моментной характеристики приближается к параболическому. Действительно, в двигателе Iв = Iа, тогда из (2.5) имеем М =СеI2а. Это выражение показывает, что изменение момента от тока нагрузки происходит, по закону параболы, пока сталь не насыщена. По мере насыщения зависимость приобретает более прямолинейный характер (кривая 4).
В компаундном двигателе моментная характеристика (кривая
3) занимает промежуточное положение между характеристиками двигателя параллельного и последовательного возбуждения.
Характеристика изменения коэффициента полезного действия. Кривая зависимости к. п. д. от нагрузки имеет характерный для всех двигателей вид (рис. 2.66). Кривая проходит через начало координат и быстро растет при увеличении полезной мощности до 1/4 номинальной. При мощности Р2, равной примерно 2/3 но-
минальной, к. п. д. обычно достигает максимального значения. При увеличении нагрузки до номинальной к. п. д. остается постоянным или незначительно падает.
Характеристики скоростная, моментная и к. п. д. называются рабочими. На рис. 2.67 представлены рабочие характеристики двигателя параллельного возбуждения.
Механические характеристики. Механическая характеристика показывает зависимость скорости вращения п от момента двигателя
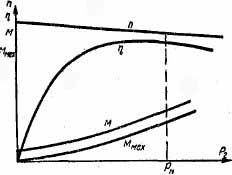 Рис. 2.67. Рабочие характеристики двигателя параллельного возбуждения
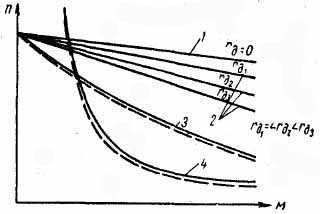 Рис. 2.68. Механические характеристики
М при неизменных напряжении U сети и сопротивлении rв регулировочного реостата, т. е. n = f(M), при U=const, rв= const.
С увеличением нагрузки двигателя параллельного возбуждения поток Ф почти не меняется, а скорость вращения лишь незначительно падает. Поэтому механическая характеристика является прямой, несколько наклоненной к оси абсцисс (кривая 1, рис. 2.68), т. е. имеет тот же характер, что и скоростная (кривая 1, рис. 2.64). С учетом выражений (2.4, а), (2.5) и (2.28) имеем:
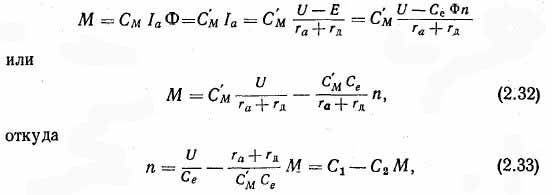 где C1 и С2— постоянные.
Анализируя (2.33), видим, что механическая характеристика двигателя с параллельным возбуждением линейна.
При отсутствии в цепи якоря добавочного сопротивления (rд = 0) коэффициент С2 весьма мал по сравнению с C1. Механическая характеристика при rд = 0 называется естественной (кривая 1, рис. 2.68).
Если в цепь якоря введено добавочное сопротивление rд, то коэффициент С2 возрастает. В результате механические характеристики располагаются более наклонно (семейство характеристик 2). Сопротивление обмотки якоря и щеточных контактов у микромашин имеет большую относительную величину. Поэтому механические характеристики микромашины располагаются более наклонно, т. е. являются менее жесткими.
 Анализируя эту формулу, видим, что механическая характеристика двигателя с последовательным возбуждением имеет вид гиперболы (кривая 4 на рис. 2.68). Ее характер изменения близок К кривой 3 на рис. 2.64. В компаундном двигателе механическая характеристика занимает промежуточное положение между характеристиками двигателей параллельного и последовательного возбуждения (кривая 3 на рис. 2.68).
При введении в цепь якоря добавочного сопротивления механические характеристики компаундного двигателя и двигателя последовательного возбуждения располагаются ниже, чем их естественные характеристики (пунктирные кривые на рис. 2.68).
Механическая характеристика двигателя с последовательным возбуждением имеет резко падающий вид. При большом моменте у двигателя существенно уменьшается скорость вращения, поэтому при пусках и малых скоростях двигатель последовательного возбуждения той же мощности имеет больший относительный момент, чем другие. Благодаря этому свойству двигатели последовательного возбуждения применяются в приводах с тяжелым пуском и резкими перегрузками.
По сравнению с двигателями последовательного возбуждения компаундные двигатели имеют то преимущество, что они могут работать вхолостую. Компаундные двигатели и двигатели последовательного возбуждения широко используются в качестве крановых и тяговых.
Способы торможения двигателей. При работе электрических машин иногда встречается необходимость тормозить двигатели, а в некоторых случаях и изменять направление их вращения.
Помимо торможения при помощи механических тормозов существуют способы электромагнитного торможения, в которых используется электромагнитный момент машины. Электромагнитное торможение может быть осуществлено рекуперативным и динамическим путем, а также противовключением двигателя.
Если во вращающемся двигателе, имеющем нагрузочный момент на валу, увеличить поток или скорость вращения таким образом, что э. д. с. становится равной напряжению сети, то двигатель разгружается и начинает вращаться вхолостую. При дальнейшем увеличении э. д. с. (E>U) машина переходит в генераторный режим, и на ее валу создается тормозной электромагнитный момент. При этом в двигателях параллельного возбуждения не требуется переключения схемы, энергия торможения отдается в сеть и может быть полезно использована. Такое торможение называется рекуперативным.
При динамическом торможении якорь двигателя отключают от сети и замыкают на нагрузочное сопротивление. Машина начинает работать в режиме генератора независимого возбуждения, используя запас кинетической энергии. В двигателях последовательного и компаундного возбуждения при динамическом торможении необходимо изменить направление тока в последовательной обмотке возбуждения, чтобы сохранить направление создаваемого ею потока.
Торможение двигателей противовключением осуществляется переключением его обмоток таким образом, чтобы вращающий момент действовал в сторону, обратную направлению вращения. При этом машина работает в генераторном режиме, а ее э. д. с. имеет направление, согласное с напряжением сети, и ток якоря
 Для ограничения тока в цепь якоря вводят сопротивление.
ВОПРОСЫ
1. В чем состоит различие уравнений напряжения и моментов двигателя и генератора? Как направлены э. д. с, ток и напряжение обмотки якоря в генераторном и двигательном режимах?
2. Почему во время пуска по мере разгона двигателя уменьшается ток якоря? Как зависит противо э. д. с. от скорости вращения? Почему во время пуска делают наименьшим сопротивление регулировочного реостата в цепи возбуждения? Почему во время пуска по мере разгона двигателя уменьшается величина вращающего момента? Почему микродвигатели можно пускать без реостата?
3. Почему с ростом момента нагрузки уменьшается скорость вращения двигателя? Как влияет реакция якоря на механические характеристики двигателя? Как влияет напряжение сети на скорость вращения двигателя?
4. Почему ненагруженный двигатель с последовательной обмоткой возбуждения увеличивает скорость вращения до недопустимых пределов?
Почему компаундные двигатели можно пускать без нагрузки, а двигатели последовательного возбуждения нельзя? Почему у микродвигателей при обрыве параллельной обмотки возбуждения скорость вращения не увеличивается до опасного значения?
5. Каким образом можно машину постоянного тока, работающую в двигательном режиме, перевести в генераторный? Как для этого требуется изменить поток машины, напряжение сети, скорость вращения?
6. Меняется ли направление вращения якоря машины постоянного тока при переходах из генераторного режима в двигательный при параллельном и при последовательном возбуждениях? Как можно изменить скорость вращения двигателя?
Содержание Главная (библиотека)
Предыдущий § Следущий
| 