|
Содержание Главная (библиотека)
Предыдущий § Следущий
§ 2.6. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ
Общие сведения. Электромашинным усилителем (ЭМУ) называется генератор постоянного тока, предназначенный для усиления по мощности сигналов, подаваемых на обмотку возбуждения. Обычный генератор тоже является ЭМУ, однако он не удовлетворяет требованиям, предъявляемым к ЭМУ, так как не обладает достаточным быстродействием и имеет низкий коэффициент усиления. Для получения большого коэффициента усиления и малой инерционности схема обмоток и конструкция ЭМУ должны существенно отличаться от применяемых в обычных генераторах постоянного тока.
В системах автоматического регулирования ЭМУ нашли широкое применение. Они являются быстродействующими, дают весьма большое усиление, имеют значительную перегрузочную способность и обладают высокими технико-экономическими и эксплуатационными показателями. ЭМУ способен в значительных пределах сохранять пропорциональность между входным сигналом и выходной величиной. Мощность управления (входа) ЭМУ весьма мала. Мощность выхода усилителя, определяющую его габариты, называют мощностью усилителя. Усиление мощности в ЭМУ происходит за счет механической энергии первичного двигателя (рис. 2.43).
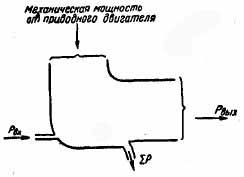 Рис. 2.43. Энергетическая диаграмма ЭМУ
Электромашинный усилитель продольного поля. Электромашинный усилитель продольного поля представляет собой генератор постоянного тока с несколькими обмотками возбуждения, одна из которых соединена по схеме самовозбуждения, обычно параллельного (рис. 2.44), в некоторых случаях последовательного или компаундного. Чтобы ЭМУ не мог самовозбуждаться, сопротивление обмотки самовозбуждения выбирают равным или большим критического. Магнитную систему выполняют слабонасыщенной, с небольшим магнитным сопротивлением. Обмотки независимого возбуждения ОУ называют обмотками управления.
Рассмотрим рабочий процесс ЭМУ продольного поля. Если ток в обмотках управления отсутствует, то характеристики холостого хода и обмотки возбуждения не пересекаются (рис. 2.45), так как α≥αкр, поэтому машина не возбуждается.
 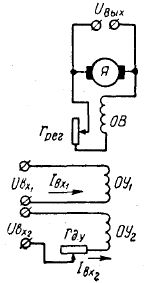
Рис. 2.44. Схема ЭМУ продольного поля
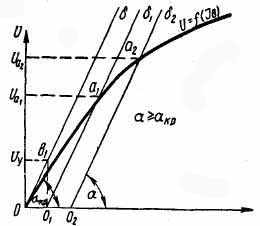 Рис. 2.45. Напряжение на зажимах якоря ЭМУ продольного поля с параллельной обмоткой самовозбуждения
за счет потока обмотки самовозбуждения, так как м. д. с. обмоток управления и самовозбуждения складываются. Для определения напряжения на якоре ЭМУ характеристику обмотки самовозбуж-
 Коэффициент усиления ЭМУ продольного поля достигает 100 и выше.
Электромашинный усилитель поперечного поля. Для повышения коэффициента усиления выполняют две ступени усиления. Простейшая схема двухступенчатого усилителя может состоять из двух генераторов независимого возбуждения (рис. 2.46). Эта схема стоит значительно дороже, чем одномашинный усилитель. Ее недостатком является большая инерционность, поэтому для целей автоматического регулирования она непригодна.
В ЭМУ поперечного поля обе ступени усиления объединены в одной машине. Первая ступень состоит из обмотки управления и якоря, который замкнут накоротко щетками q — q, расположенными по геометрической нейтрали, (рис. 2.47). В этой ступени усиления при вращении машины небольшая м. д. с. обмотки управления создает значительную поперечную реакцию якоря Faq (рис. 2.48).
Во второй ступени усиления на продольных щетках d — d возникает напряжение, которое создается э. д. с, индуктируемой в обмотке якоря при его вращении в поле, создаваемом м. д. С. поперечной реакции якоря Faq. Напряжение Uвых на щетках d — d является выходным. Таким образом, ЭМУ поперечного поля представляет собой одноякорный двухступенчатый усилитель, у которого поток второй ступени создается поперечной реакцией якоря первой ступени. Отсюда и название — усилитель поперечного поля.
Если напряжение Uвых подсоединено к какому-либо нагрузочному сопротивлению, то по якорю через щетки d — d проходит ток Iвых. Создаваемая им реакция якоря Fad является продольной и
направлена встречно по отношению к м. д. с. обмотки управления. Для компенсации продольной реакции якоря предусматривается компенсационная обмотка КО, соединенная последовательно с якорем через щетки d — d. Сопротивление rk (см. рис. 2.47) позволяет регулировать степень компенсации. Для улуч-
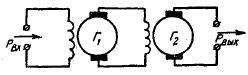 Рис. 2.46. Двухступенчатый усилитель, состоящий из двух генераторов независимого возбуждения
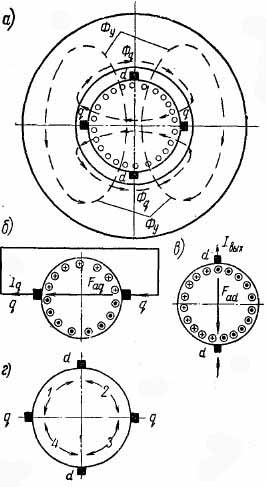 Рис. 2.47. Схема ЭМУ поперечного поля
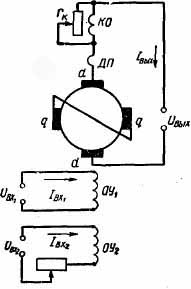
Рис. 2.48. Распределение потоков и токов ЭМУ поперечного поля: а — распределение потоков; б — распределение тока первой ступени усиления; в — распределение тока второй ступени усиления; г — секторы якоря
шения коммутации тока выходной цепи устанавливают дополнительные полюса ЦП.
Сравнивая распределение тока якоря в первой (рис. 2.48, б) и второй (рис. 2.48, в) ступенях усиления, видим, что в проводниках обмотки якоря, расположенных в секторах 1 и 3 (рис. 2.48, г), протекает сумма токов первой (Iq) и второй (Iвых) ступеней, а в секторах 2 и 4 — их разность. Результирующий ток, определяющий потери якоря, равен

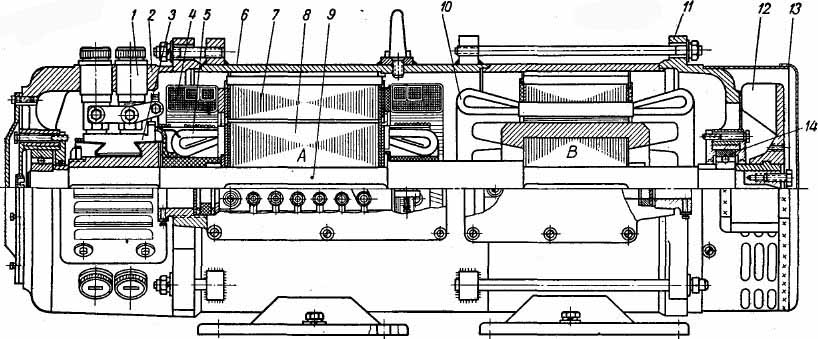 Рис. 2.49. Разрез ЭМУ поперечного поля:
1 — щеткодержатель; 2 — щит коллекторный; 3 - коллектор; 4 — обмотка управления; 5 — обмотка якоря; 6 — корпус; 7 — сердечник статора ЭМУ; 8 — сердечник якоря ЭМУ; 9 — вал; 10 — обмотка статора приводного двигателя; 11 — подшипниковый щит; 12 — вентилятор; 13 — кожух вентилятора; 14 — подшипник
Обычно Iq = (0,25÷0,35)Iвых. При Iq = 0,3Iвых эквивалентный ток I, определяющий сечение обмотки якоря, отличается от выходного всего на 5%.
Коэффициент усиления ЭМУ поперечного поля во много раз больше, чем продольного, он может превышать 10000. Постоянная времени ЭМУ поперечного поля составляет всего 0,1÷0,3 сек.
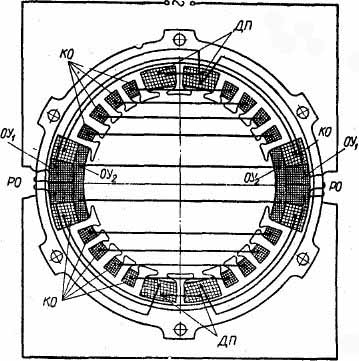 Рис. 2.50. Размещение обмоток в статоре ЭМУ
Конструктивное выполнение ЭМУ поперечного поля. Обычно ЭМУ поперечного поля мощностью до 1—2 квт выполняется в одном корпусе с приводным двигателем (рис. 2.49). Якори ЭМУ (А) и приводного двигателя (В) насаживаются на один вал. Статор ЭМУ выполняется с неявно выраженными полюсами (сравнить статор ЭМУ, рис. 2.50, и обычной машины постоянного тока, рис. 2.1). Пакет статора собирается из листов электротехнической стали, в которых выштампованы три вида пазов: большие, средние и малые. Благодаря наличию двух больших пазов в магнитной системе статора образуются два неявно выраженные полюса, расщепленные средними и малыми пазами. В больших пазах размещаются обмотки управления ОУ1 и OУ2, а также часть компенсационной обмотки КО. Остальная компенсационная обмотка КО размещается в малых пазах. В средних пазах размещается обмотка дополнительных полюсов ДП.
Остаточное намагничивание неблагоприятно сказывается на работе ЭМУ, особенно при изменении направления сигнала на об-
мотке управления. В этом случае нарушается однозначность зависимости между входными и выходными величинами.
В ЭМУ применяется электротехническая листовая сталь с пониженным значением остаточной индукции. В некоторых случаях для уменьшения остаточного магнетизма на ярмо статора наматывают специальную размагничивающую обмотку РО (рис. 2.50), по которой пропускают переменный ток (обычно 50 гц). Переменный поток, создаваемый этой обмоткой, не проходит в якорь, но перемагничивает сталь ярма, что уменьшает действие ее остаточного магнетизма.
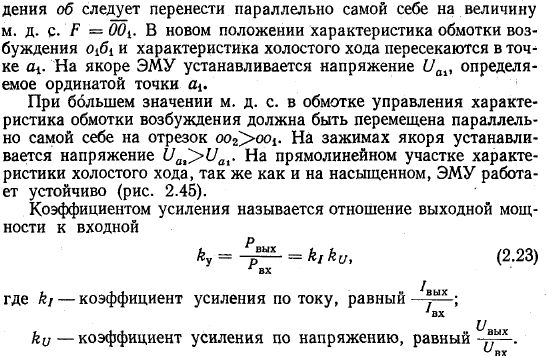
Коэффициент усиления. Обычно ЭМУ поперечного поля имеют двухполюсное исполнение, поэтому при выводе выражения коэффициента усиления принимаем 2р = 2. Тогда с учетом формул (2.4) и (2.23) коэффициент усиления первой ступени ЭМУ поперечного поля выразится
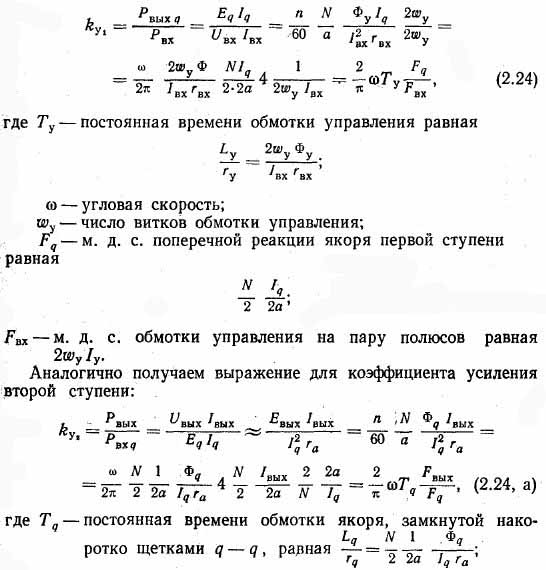
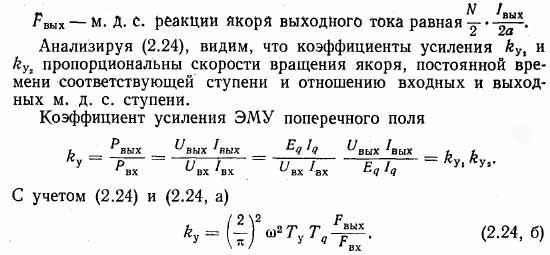 Из выражения (2.24, б) следует, что коэффициент усиления ЭМУ поперечного поля пропорционален квадрату скорости вращения, произведению постоянных времени обмоток управления и якоря и отношению м. д. с, создаваемых токами входа и выхода.
Влияние некоторых факторов на коэффициент усиления и быстродействие. Сопротивление ra цепи якоря, которое определяет постоянную времени Tq, зависит от переходного сопротивления контакта щеток q — q. Поэтому в случае применения щеток с большим переходным сопротивлением, а также при ухудшении переходного контакта от щеток к коллектору коэффициент усиления ЭМУ становится меньше.
Секции обмотки якоря, находящиеся в процессе коммутации под щетками q — q, создают поле, которое будучи направлено встречно м. д. с.
обмотки управления, ослабляет его. В результате действия коммутационных токов коэффициент усиления снижается. Для уменьшения реакции коммутационных токов ширину щеток выбирают не более 1—1,5 ширины коллекторной пластины, поэтому одновременно коммутирует лишь одна или две секции.
Магнитодвижущая сила Fвых пропорциональна току Iвых. Вследствие этого, согласно (2.24, б), коэффициент усиления зависит от тока Iвых. При полной компенсации продольной реакции якоря эта зависимость близка к линейной (кривая 2 на рис. 2.51).
В процессе работы режим ЭМУ может изменяться. При этом в маг-нитопроводе возникают вихревые токи, которые препятствуют из-
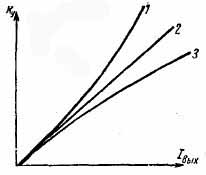
Рис. 2.51 Зависимость коэффициента усиления от выходного тока ЭМУ поперечного поля: 1 — при перекомпенсации продольной реакции якоря, 2 — при полной компенсации; 3 — при недокомпенсации
менению потока, в результате чего быстродействие ЭМУ снижается. Для уменьшения вихревых токов всю магнитную систему ЭМУ собирают из пакетов лакированных листов электротехнической стали.
Часто для уменьшения постоянной времени Ту в цепь обмотки управления вводят добавочное сопротивление кд.у. (см. рис. 2.44 и 2.47). При уменьшении постоянных времени быстродействие ЭМУ улучшается. Коэффициенты усиления ky1 и ky2 пропорциональны постоянным времени Ту и Tq. Поэтому с улучшением быстродействия коэффициент усиления ЭМУ становится меньше.
Влияние коэффициента усиления на устойчивость работы ЭМУ поперечного поля. Как и во всякой машине постоянного тока в ЭМУ при сдвиге щеток q — q с геометрической нейтрали появляется продольная реакция тока Iq, направление действия которой совпадает с осью обмоток управления. Магнитодвижущая сила обмоток управления весьма мала, ввиду чего даже при незначительном сдвиге щеток продольный поток первой ступени существенно изменяется. Как и в любом генераторе, м. д с. продольной реакции якоря от тока Iq при сдвиге щеток против вращения усиливает поток обмоток управления. При этом коэффициент усиления ky возрастает, но ЭМУ может самовозбудиться и потерять управление. Чтобы сохранить устойчивой работу ЭМУ, щетки обычно сдвигают на небольшой угол по направлению вращения якоря, при этом коэффициент усиления уменьшается.
Регулируя сопротивление реостата rк (см. рис. 2.47), можно изменять м. д. с. компенсационной обмотки КО. Магнитодвижущие силы обмоток управления и компенсационной направлены согласно. Поэтому при большей степени компенсации коэффициент усиления ЭМУ увеличивается. В случае перекомпенсации наблюдается стремление ЭМУ к самовозбуждению. Во избежание этого сопротивление rк настраивают таким образом, чтобы была некоторая недокомпенсация. При этом коэффициент усиления несколько уменьшается. Отсюда следует, что сдвигать щетки и регулировать ток в компенсационной обмотке надо таким образом, чтобы коэффициент усиления несколько снижался. При этом работа ЭМУ поперечного поля становится надежной и устойчивой.
Характеристики ЭМУ поперечного поля. При Iвых = 0 зависимость выходной э. д. с. от тока обмотки управления, т. е. Eвых = f(Iвх) называется результирующей характеристикой холостого хода ЭМУ. Начальная часть этой характеристики нелинейна (рис. 2.52). При весьма малых значениях э. д. с. Eвых крутизна характеристики небольшая, затем увеличивается и заканчивается прямолинейным участком, это объясняется увеличением сопротивления поперечных щеток q — q при малых значениях тока. Для получения линейной зависимости между выходными и входными сигналами, а также для получения
большего коэффициента усиления, номинальное напряжение ЭМУ выбирается на прямолинейной части результирующей характеристики холостого хода.
Зависимость выходного напряжения от выходного тока, т. е. Uвых = f(Iвых) называется внешней характеристикой ЭМУ. В случае полной компенсации продольной реакции якоря тока Iвых напряжение Uвых уменьшается с увеличением тока Iвых за счет падения напряжения в цепи якоря (кривая 1 на рис. 2.53). При недокомпенсации внешняя характеристика располагается ниже
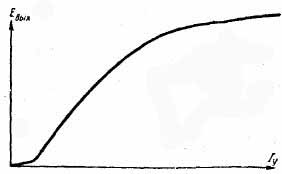 Рис. 2.52. Результирующая характеристика холостого хода ЭМУ поперечного поля
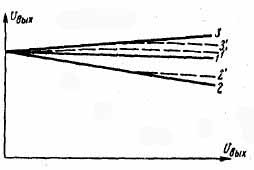
Рис. 2.53. Внешние характеристики ЭМУ поперечного поля
(кривая 2). При перекомпенсации наблюдается склонность ЭМУ к самовозбуждению. Это выражается в том, что с ростом тока прогрессивно увеличивается напряжение выхода (кривая 5).
В случае насыщения магнитной системы, т. е. когда ЭМУ работает на криволинейном участке результирующей характеристики холостого хода, внешние характеристики становятся нелинейными (на рис. 2.53 они показаны пунктирными линиями 2' и
3').
ВОПРОСЫ
1. Может ли обычный генератор с самовозбуждением использоваться как ЭМУ продольного поля? Как выбирается величина сопротивления цепи обмотки самовозбуждения ЭМУ продольного поля?
2. Каким образом в одноякорном ЭМУ поперечного поля совмещаются две ступени усиления? В каком режиме работает генератор, эквивалентный первой ступени усиления ЭМУ? Какие щетки ЭМУ принадлежат первой ступени усиления? Какой обмоткой создается поток возбуждения второй ступени усиления?
4. От каких факторов зависит коэффициент усиления ЭМУ? Какое назначение в ЭМУ поперечного поля имеет компенсационная обмотка?
4. Какие средства применяют для того, чтобы работа ЭМУ поперечного поля была устойчивой? В какую сторону сдвигают щетки ЭМУ? Какую применяют степень компенсации продольной реакции якоря? Как при этом изменяется коэффициент усиления ЭМУ?
Содержание Главная (библиотека)
Предыдущий § Следущий
| 