|
Содержание
Предыдущий § Следующий
1.4. Параметры электрических машин
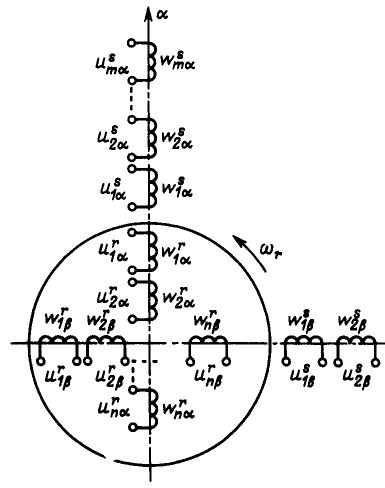
Параметры электрических машин — это коэффициенты перед независимыми переменными в уравнениях электромеханического преобразования энергии. Как правило, параметрами являются активные сопротивления, взаимные индуктивности, индуктивности рассеяния и полные индуктивности обмоток. Параметром машины является также момент инерции.
Рис. 1.8. Математическая модель обобщенного электромеханического преобразователя
зазора по продольной оси, xaq < хац. В обычных синхронных машинах kj m 0,85 ч- 0,9, а kq « 0,5.
Момент инерции J является мерой инертности тела и влияет на динамические характеристики машины. Момент инерции вращающегося тела равен сумме произведений масс всех его точек на квадраты их расстояний от оси вращения.
В переходных процессах индуктивные сопротивления из-за насыщения изменяются, поэтому при исследовании динамики нельзя использовать параметры установившегося режима. Это в основном относится к индук-тивностям, так как активные сопротивления и момент инерции обычно в переходных процессах не изменяются.
В синхронных машинах первый момент переходного процесса характеризуется сверхпереходными и переходными сопротивлениями. Если машина имеет демпферную обмотку, в переходном процессе она характеризуется сверхпереходными сопротивлениями по продольной и поперечной осям х"а и x'q. Машины, не имеющие демпферной обмотки, характеризуются переходными сопротивлениями xj и х'ц. При этом x"<l < х'д < х$, а x'd < x'q. Значения сверхпереходных и переходных сопротивлений приводятся в каталогах и таблицах для синхронных машин.
Для асинхронных машин, так же как и для синхронных, необходимо для исследования переходных процессов пользоваться переходными сопротивлениями. Однако переходные сопротивления или индуктивности до сих пор в каталогах и таблицах не приводятся. Чтобы получить значения переходных и взаимных индуктивностей, следует взаимные и полные индуктивности в установившемся режиме уменьшить в 1,5 — 2 раза.
Более точное значение переходных индуктивностей может быть найдено из решения уравнений динамики асинхронных двигателей. Если известны ударные моменты и время переходного процесса, методом итераций могут быть определены значения переходных сопротивлений
х[ = 2п/Ц; x;2=2nfM', (1.28)
где Lj — переходная полная индуктивность обмотки статора; М' — переходная взаимная индуктивность асинхронной машины.
При несимметричных режимах рассматривают параметры обратной и нулевой последовательностей.
Сопротивление обратной последовательности
z2 = r2+jx2, (1.29)
где г2, х2 — активное и индуктивное сопротивления обратной последовательности.
Сопротивление нулевой последовательности
lo = ro+ jx0; (1.30)
здесь г0, х0 — активное и индуктивное сопротивления нулевой последовательности.
Параметры машины определяют эксплуатационные показатели электроприводов. Удобно сравнивать электрические машины, если параметры выражены в относительных единицах:
*** ~ '"-'ф,ном/^ф,ном > •*■* = ^■'ф,ном/^ф,ном >
z* =^ф,ном/^ф,ном> (1-31)
где /ф,„ом> иф,ном - соответственно номинальные значения фазных токов и напряжений; г, х, z — соответственно абсолютные значения активных, индуктивных и полных сопротивлений.
В дальнейшем . для упрощения записи индекс * в обозначениях относительных параметров опускается.
Содержание
Предыдущий § Следующий
| 