2. Выбор исполнительного асинхронного микродвигателя (ИАД) для приборной следящей системы малой мощности
2.1 В приводах приборных следящих систем
мощностью от десятка до долей ватта момент инерции нагрузки обычно очень мал,
невелик и момент инерции ротора. Поэтому в общем моменте инерции возрастает
доля, вносимая моментом инерции редуктора.
При этих условиях задача расчета оптимального передаточного отношения редуктора не
имеет смысла. Передаточное отношение определяется соотношением номинальной
частоты вращения двигателя и заданной частоты вращения выходного вала.
Проверку на нагрев таких двигателей не производят, т.к.
их обмотка возбуждения рассчитана на длительный режим включения при неподвижном
роторе двигателя, а ток по обмотке управления протекает только при вращении ротора.
2.2 Предварительные оценки и расчеты
выполняются исходя из параметров статического (без ускорения) режима работы привода.
2.2.1 Предварительная оценка диапазона номинальной мощности Рном для выбора двигателя может быть
сделана по максимальному
значению статического момента нагрузки Мнг (Н*м) и максимальной угловой скорости
исполнительной оси wнг.max(рад/с)
Рном= (1,2  2,5)*Мнг*wнг.max (Вт)
(2.1)
2,5)*Мнг*wнг.max (Вт)
(2.1)
Выбор двигателя завышенной (по отношению к 2.1)
мощности приведет к увеличению габаритов и массы привода, повышенному расходу
электроэнергии. Завышение мощности может отрицательно сказаться на динамических
свойствах системы, т.к. с увеличением мощности двигателя растут размеры и,
соответственно, момент инерции ротора. Двигатели заниженной (по отношению к 2.1) мощности практически
наверняка не обеспечивают требуемых динамических показателей системы и
необходимую перегрузочную способность.
2.2.2 Оценка диапазона номинальной частоты
вращения вала nном (об/мин)
выбираемого двигателя может быть сделана исходя из максимально допустимого
передаточного отношения редуктора и заданного диапазона угловых скоростей
исполнительной оси:
 .
(2.2)
.
(2.2)
2.3 Предварительный выбор двигателя с использованием
автоматизированной системы, реализованной на ПЭВМ
Автоматизированная
система выбора двигателей представляет собой систему удаленного доступа к базам
данных, с использованием Сети Internet,технологии ASP и средств ODBC.
2.3.1 Предварительный выбор заключается в
определении ограниченного множества двигателей, принадлежащих к выбранным
сериям, удовлетворяющих требованиям (2.1) и (2.2) и имеющих номинальное напряжение питания, соответствующее Т3.
2.3.2
Предварительный выбор двигателей осуществляется студентом-разработчиком в
режиме диалога с ПЭВМ. При этом студент вводит в ПЭВМ данные, указанные в п.2.2.1 и ему выдается список двигателей,
удовлетворяющих требованиям п.2.2.1.
2.3.3 Для предварительного выбранных двигателей
студент должен распечатать или записать технические данные. В таблицу данных ИАД входят:
- тип двигателя;
- номинальная мощность;
- максимальная мощность управления;
- номинальное напряжение возбуждения;
- номинальное напряжение управления;
- пусковой ток возбуждения;
- пусковой ток управления;
- частота напряжения питания;
- пусковой момент;
- номинальный момент;
- частота вращения ротора при х.х.;
- напряжение трогания;
- момент инерции ротора двигателя;
- электромеханическая постоянная времени;
- масса двигателя;
- К.П.Д.;
- габаритные размеры;
- диаметр вала двигателя.
Если для какого-либо из двигателей в данных отсутствует значение номинальной частоты вращения nном ,
определить nном через Рном и Мном.
2.4 Окончательный выбор двигателя
Окончательный выбор двигателя осуществляется исходя из заданных показателей качества следящей
системы, т.е. для динамического режима: eнг.max, wнг.max.
В качестве критерия выбора обычно принимают следующий: двигатель удовлетворяет
требованиям Т3, если его пусковой момент больше или равен максимально
возможному моменту сопротивления на валу двигателя Мmax в динамическом режиме:
(1,2
 1,25) Мmax
1,25) Мmax  Mп , где (2.3)
Mп , где (2.3)
(1.2
 1.25) - коэффициент запаса по пусковому моменту.
1.25) - коэффициент запаса по пусковому моменту.
При этом выбор двигателя заключается в последовательном усечении множества двигателей, предварительно выбранных в п. 2.3.
2.4.1. Для каждого из двигателей,
выбранных в п. 2.3, определить передаточное отношение редуктора iред, обеспечивающее заданную
угловую скорость исполнительной оси:
 (2.4)
(2.4)
2.4.2. Для
каждого из редукторов рассчитать момент инерции, приведенный к валу двигателя.
2.4.2.1.
Задаться рекомендуемыми размерами и параметрами редукторов. Число ступеней
редуктора m рекомендуется выбирать от 2 до 4 с таким расчетом, чтобы передаточное отношение ступени не превышало 10.
Передаточные отношения ступеней ориентировочно принимаем равным

Число зубьев zш рекомендуется принять равным 18-24.
Тогда число зубьев на колёсах ступеней
zkj = zш*iст, где j=1…m.
Округляем число зубьев zkj колес всех ступеней, за
исключением последней, до ближайших целых чисел. В последней ступени округление
производится таким образом, чтобы произведение передаточных отношений ступеней
наименее отличалось от заданного iред.
Уточнение передаточных отношений ступеней осуществляется по формуле
 , где j=1…m. , где j=1…m.
Расчетный модуль зубьев определяется из соотношения:
mрасч= dш1 / zш
где диаметр шестерни первой ступени dш1 (мм) выбирается в зависимости от диаметра вала
двигателя dв.дв (мм)
dш1 » 2.5 dв.дв .
По СТ СЭВ 310-76 принимаем на всех ступенях нормальный модуль mz зацепления, ближайший
наибольший к mрасч (табл 2.1).
Таблица 2.1.
|
0.1
|
0.15
|
0.2
|
0.3
|
0.4
|
0.5
|
0.6
|
0.8
|
1
|
1.25
|
1.5
|
2
|
2.5
|
3
|
4
|
В зависимости от значения модуля рекомендуется выбирать ширину шестерни примерно
равной 10 mz, колёс -5 mz, диаметр валов dв » 10 mz, длину
валов - 10dв.
2.4.2.2. Составить кинематическую схему редуктора с числом ступеней m.
Пример кинематической схемы двухступенчатого редуктора показан на рис. 2.1.
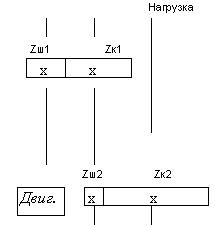
Рис. 2.1.
2.4.2.3.
Приняв, что зубчатые шестерни, колеса и валы представляют собой стальные
цилиндры соответствующих размеров, рассчитать момент инерции редуктора Jред, приведенный к валу двигателя.
2.4.3. Для
каждой из выбранных пар двигатель - редуктор рассчитать максимально возможный момент сопротивления в
динамическом режиме Mmax и
проверить условие (2.3). Момент Mmax
определяется статическими моментами сопротивления нагрузки и редуктора и
моментами инерции всех подвижных частей привода:
Mmax= M'нг
+( Jдв + J'ред +( J'нг /hред))*eнг.max
* iред,
(2.5)
где M'нг - статический момент сопротивления нагрузки, приведенный к валу двигателя;
J'ред , J'нг - моменты
инерции редуктора и нагрузки, приведенные к валу двигателя;
hред - к.п.д. редуктора (ориентировочно 0.8
 0.9). 0.9).
Проверить условие (2.3), если оно выполняется, то двигатель
отвечает требованиям ТЗ. Предпочтение следует отдать двигателю меньшей мощности.
2.5 Построение механической характеристики
выбранного двигателя при номинальном напряжении управления
2.5.1.
Реальные механические характеристики исполнительных асинхронных микродвигателей
являются нелинейными и их жесткость зависит от коэффициента сигнала a (a=Uу /Uу.ном),
где Uуи Uу.ном - текущее и
номинальное значения напряжения управления. В первом приближении механические характеристики определяются уравнением
 ,
(2.6)
,
(2.6)
где Mдв - вращающий момент на валу двигателя;
Mпa - пусковой момент при данном сигнале;
w0a - угловая скорость холостого хода при данном сигнале;
w2 - угловая скорость ротора;
m - нелинейность механической характеристики.
2.5.2. Для
выбранного двигателя из уравнения (2.5) определить расчетное значение нелинейности
m , при которой механическая характеристика будет проходить через заданные в каталоге точки
холостого хода, пускового момента, номинальной нагрузки при номинальном
напряжении управления (w0a, Mпa,
a).
2.5.3. При
рассчитанном значении m рассчитать и построить механическую
характеристику выбранного двигателя при номинальном напряжении управления
(число расчетных точек 5-7 в диапазоне от 0 до n0, где n0 - частота вращения двигателя при холостом ходе).
2.6. Определение параметров передаточной функции выбранного двигателя
2.6.1.
Механические и регулировочные характеристики исполнительных асинхронных
микродвигателей нелинейные и передаточные функции в общем случае весьма
сложные. Однако, при линеаризации характеристик и пренебрежении
электромагнитными переходными процессами передаточные функции упрощаются и имеют вид
 (2.7)
(2.7)
 (2.8)
(2.8)
где p - оператор Лапласа;
q2 - угол поворота ротора.
Коэффициент передачи двигателя
 ,
(2.9)
,
(2.9)
электромеханическая постоянная времени
 ,
(2.10) ,
(2.10)
где коэффициент внутреннего демпфирования
 .
(2.11) .
(2.11)
2.6.2. При линеаризации механических и регулировочных характеристик коэффициент передачи двигателя
может быть определен как отношение:
 . (2.12)
. (2.12)
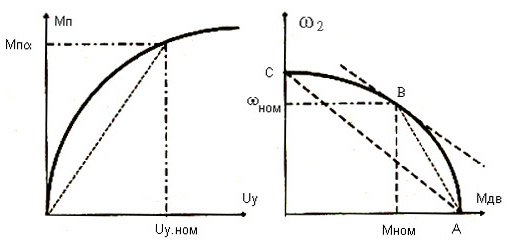
Коэффициент пропорциональности между пусковым моментом и напряжением управления
 (2.13)
(2.13)
при линеаризации зависимости Mпa = f (Uу) (рис. 2.2.б, пунктирная
линия) определяется по каталожным данным
 . (2.14) . (2.14)
Линеаризацию механической характеристики
можно осуществить различными способами (рис. 2.2.б, пунктирная линия). Наиболее
часто используются следующие три способа.
Если установившийся режим работы - вращение двигателя с угловой скоростью близкой к
номинальной, то линеаризацию целесообразно провести посредством касательной к
точке B. При этом Kдем может
быть определен по графически заданной механической характеристике.
Если угловая скорость изменяется в диапазоне от нуля до номинальной, то линеаризацию
целесообразно проводить посредством секущей AB. При этом
 .
(2.15) .
(2.15)
Если угловая скорость изменяется во всем диапазоне от
нуля до скорости холостого хода, то линеаризацию можно провести посредством
секущей AC. Это наиболее грубый способ линеаризации, при нем
 . .
2.6.3.
Рассчитать для выбранного значения двигателя значения Kдв и tм при трех указанных в п. 2.6.2.
способах линеаризации механической характеристики. При расчете использовать каталожные данные и
расчетную механическую характеристику (п. 2.5.).
а)
б)
Рис.2.16
Назад | Оглавление | Вперед
| 