Содержание
< назад вперед >
§ 137. РЕГУЛИРОВАНИЕ
СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА. МОМЕНТ ВРАЩЕНИЯ
Выше было
установлено, что величина противо-э. д. с. зависит от скорости вращения и
величины магнитного потока двигателя. Эта зависимость выражается формулой

Откуда
Из последнего
выражения следует, что скорость вращения я двигателей постоянного тока можно
регулировать тремя способами:
изменением
величины напряжения U,
подводимого к двигателю;
изменением
общего сопротивления цепи якоря при помощи добавочного регулировочного
сопротивления rра, включенного
последовательно с обмоткой якоря. В этом случае скорость вращения двигателя определяетсяпо
формуле
изменением
магнитного потока Ф при помощи регулировочного реостата rрв, включенного в цепь возбуждения. Основным уравнением
двигателя постоянного тока, как было указано выше, является

Умножив
правую и левую части этого уравнения на ток якоря Iа, получим уравнение мощностей

где —-
электрическая мощность, потребляемая двигателем из сети; —-
электрическая мощность, потребляемая двигателем из сети;
I2a— потеря мощности в обмотке якоря;
ЕIa = Рм — полная механическая мощность двигателя.
Как известно,
Рм = М • ω,
где М —
момент вращения двигателя,
ω —
угловая скорость якоря,
поэтому Е •Ia = М ω.
Момент вращения двигателя

Подставляя в
формулу момента значения э. д. с. Е и угловой скорости ω,
равные
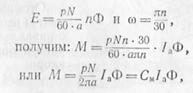
где  постоянная величина для данной машины. постоянная величина для данной машины.
| 