Содержание
< назад вперед >
§ 134. РАБОТА МАШИНЫ ПОСТОЯННОГО ТОКА В КАЧЕСТВЕ
ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ
Если машину постоянного тока
подключить к источнику напряжения, то она станет работать электрическим
двигателем, т. е. превращать электрическую энергию в энергию механическую. Это
свойство электрических машин
работать как в качестве генератора, так
и в качестве
двигателя называется обратимостью.
Электрический двигатель был
изобретен в 1834 г.
русским академиком Б. С. Якоби.
В 1838 г. Якоби применил свой
электродвигатель для движения лодки на р. Неве. Для питания двигателя была
использована гальваническая батарея.
Якоби разработал тот тип
коллектора машин постоянного тока, который в основных чертах применяется до
настоящего времени.
Несмотря на то что существуют
более простые по устройству и удобные в эксплуатации двигатели переменного
тока, большое применение на практике имеют и двигатели постоянного тока.
Основное преимущество этих двигателей — широкая регулировка скорости — дает
возможность применять двигатели постоянного тока на электрифицированном
транспорте, в грузоподъемных механизмах, в горной технике, в различных схемах
автоматического регулирования и управления и т. п.
В СССР изготовляются
двигатели постоянного тока на широкий диапазон мощностей.
Тяговые двигатели трамвая
имеют мощности от 33 до 54,5 кет, 550 в, 560— 660 об/мин. Для магистральных
электровозов применяются двигатели мощностью 320—450 кет, 750 в и 1500 в.
Крановые двигатели изготовляются от 3 до 100 кет. Для привода прокатных станов
устанавливаются двигатели постоянного тока мощностью в несколько тысяч
киловатт.
Устройство электрических
двигателей постоянного тока такое же, как генераторов. Принцип действия
электрических двигателей постоянного тока основан на взаимодействии тока,
протекающего в обмотке якоря, и магнитного поля, создаваемого полюсами электромагнитов.
При постоянной скорости
вращения момент, развиваемый двигателем, равен моменту сопротивления
механической нагрузки, приложенной к валу двигателя:

Мощность, потребляемая
двигателем из сети, больше мощности на валу на величину потерь на трение в
подшипниках, щеток о коллектор, якоря о воздух, потерь в стали на гистерезис и
вихревые токи, потерь мощности на нагрев обмоток двигателя и реостатов. К. п.
д. электрического двигателя с изменением нагрузки меняется. При номинальной
мощности величина к. п. д. двигателей колеблется от 70 до 93% в зависимости от
мощности, скорости вращения и исполнения двигателя.
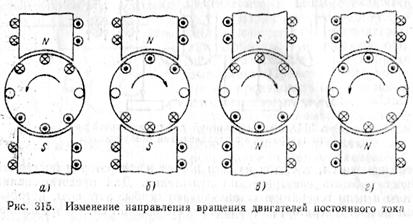
Перемена направления
вращения' двигателя может быть произведена путем изменения направления тока
либо в обмотке якоря (рис. 815,а и б), либо в обмотке полюсов (рис. 315, а и
в). Двигатель, у которого одновременно изменено направление тока как в обмотке
якоря, так и в обмотке полюсов, будет вращаться в ту же сторону, что и прежде
(рис. 315, г).
В зависимости от соединения
обмотки якоря и обмотки возбуждения электрические двигатели постоянного тока
делятся на двигатели с параллельным, последовательным и смешанным возбуждением.
| 