Содержание
< назад вперед >
§ 120. РАБОЧИЙ РЕЖИМ СИНХРОННОГО ДВИГАТЕЛИ
При
вращении возбужденного ротора с синхронной скоростью взаимодействие
полюсов вращающегося магнитного поля с полюсами ротора
создает электромагнитный момент, который в двигателе является вращающим моментом.
На риc. 284
показано взаимодействие полюсов магнитных полей статора и
ротора при различных значениях момента сопротивления механической нагрузки на валу
двигателя.
Для лучшего
уяснения рассматриваемого вопроса статор и ротор показаны в развернутом виде.
В положении
а на рис. 284
оси полей статора и ротора совпадают и угол между осями  = 0. Такое положение ротора
возможно в том случае, когда момент сопротивления также равен нулю. Силы
взаимодействия между полюсами действуют вдоль осей полюсов.
Касательные силы, способные создать момент вращения ротора, равны нулю.
Пусть на валу двигателя возникла механическая нагрузка. Ротор при этом
затормозится, ось его поля несколько сместится относительно оси поля статора
на угол в, но скорость его вращения по-прежнему будет синхронной. = 0. Такое положение ротора
возможно в том случае, когда момент сопротивления также равен нулю. Силы
взаимодействия между полюсами действуют вдоль осей полюсов.
Касательные силы, способные создать момент вращения ротора, равны нулю.
Пусть на валу двигателя возникла механическая нагрузка. Ротор при этом
затормозится, ось его поля несколько сместится относительно оси поля статора
на угол в, но скорость его вращения по-прежнему будет синхронной.
В положении
б на рис. 284 угол взят равным 45°. Учтены лишь взаимодействия
между разноименными полюсами. Раскладывая силы
взаимодействия между полюсами статора и ротора, мы видим, что, кроме радиальных
составляющих Fp, возникли касательные составляющие силы FK, под действием которых ротор
будет развивать электромагнитный момент, направленный в сторону вращения поля
статора.
При некоторой механической
нагрузке на валу ротор синхронного двигателя может
сместиться на угол , равный 90°, вращаясь по-прежнему с синхронной
скоростью. Этот случай показан на
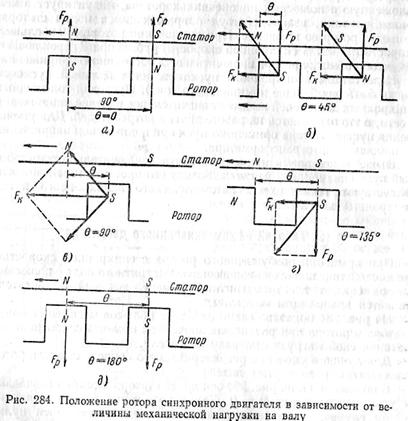
рис. 284, в. Из чертежа видно, что
величины касательных сил FK увеличились
и электромагнитный момент, развиваемый ротором, также увеличится.
Если под действием
увеличенной нагрузки ротор сместится, например, еще на 45° и угол
будет равен уже 135°, то, как видно на рис.
284, г, величины
касательных сил уменьшились. Электромагнитный момент, развиваемый
ротором, уменьшится. Таким образом, при > 90° с увеличением механической нагрузки
на валу двигателя
вращающий момент не увеличивается, а уменьшается.
В положении ротора, изображенном на рис. 284. д, угол
=180°,
касательные силы отсутствуют и момент ротора равен нулю. При угле >180°
нетрудно убедиться, что момент вращения ротора изменит свой знак, т. е. он
становится тормозным, как у генератора. Рассмотрев несколько положений ротора, мы
можем прийти к следующему выводу.
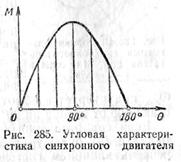
Вращающий
момент, развиваемый ротором синхронного двигателя, зависит от угла . С
увеличением момент двигателя сначала
увеличивается, достигая максимального значения Ммакс при = 90°, а затем начинает уменьшаться, и при =180° электромагнитный момент
двигателя становится
равным нулю.
Анализ
показывает, что электромагнитный
вращающий момент синхронного двигателя прямо пропорционален
синусу угла в:
Мэм=Ммакс
sin
На рис. 285
представлена зависимость Мэм
от 6. Эта зависимость называется угловой характеристикой.
В зависимости от величины
механической нагрузки на валу двигателя меняется угол . Тормозной
момент нагрузки, соответствующий
углу = 90°, называется опрокидывающим
моментом. Если момент
сопротивления будет больше опрокидывающего момента, то ротор
двигателя не сможет вращаться синхронно с полем, двигатель выпадает из
синхронизма и останавливается, так как при этом повышение нагрузочного момента
сопровождается не увеличением Мэм, а его уменьшением.
При значениях угла, , близкого
к 90°, работа синхронного двигателя
становится неустойчивой. Обычно угол н при номинальной нагрузке находится в
пределах 20 ÷ 30°.
Перегрузочная способность синхронного двигателя равна
| 