Содержание
< назад вперед >
§ 108. ВРАЩАЮЩИЙ МОМЕНТ АСИНХРОННОГО ДВИГАТЕЛЯ
Принцип
действия асинхронного двигателя, как указывалось, основан на взаимодействии
вращающегося поля и тока, индуктированного этим
полем в обмотке ротора.
В результате взаимодействия
магнитного потока Ф с током I2, протекающим в проводниках
обмотки ротора, возникают электромагнитные силы, приводящие ротор во вращение.
Поэтому вращающий
момент, создаваемый на валу двигателя, зависит от
величины тока ротора I2 и от
магнитного потока Ф.
Кроме того,
на величину вращающего момента асинхронного
двигателя влияет сдвиг фаз между током I2 и э. д. с. ротора. между током I2 и э. д. с. ротора.
Для уяснения влияния  рассмотрим картину
электромагнитных сил, действующих па проводники ротора. рассмотрим картину
электромагнитных сил, действующих па проводники ротора.
Рассмотрим
сначала случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз
между током и э. д. с. можно пренебречь
(рис. 255, а). Вращающееся
магнитное поле статора здесь заменено полем полюсов N и S,
вращающимся, предположим, по направлению
часовой стрелки. Пользуясь правилом «правой руки», определяем
направление э. д. с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся
магнитным полем, создают момент вращения. Направления сил, действующих на
проводники с током, определяются
по правилу «левой руки». Как видно из
чертежа,
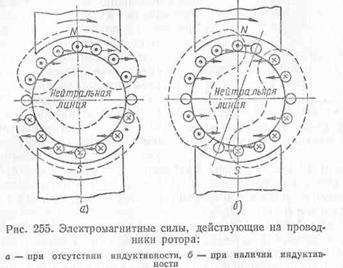
ротор под
действием электромагнитных сил будет вращаться в ту же сторону, что и само
вращающееся поле, т. е. по часовой стрелке.
Рассмотрим второй случай,
когда индуктивность обмотки ротора относительно
велика. В этом случае сдвиг фаз между током ротора I2 и э. д. с.
ротора будет также значительным. На рис. 255, б магнитное поле статора асинхронного
двигателя по-прежнему показано в виде вращающихся по направлению часовой
стрелки полюсов N и S.
Направление индуктированной в обмотке ротора э. д. с. остается таким
же, как и на рис. 255, а, но
вследствие запаздывания тока по фазе максимум тока I2 наступает позднее, чем
максимум э. д. с.
На рис. 255
показано направление индуктированных токов в отдельных
проводниках ротора в рассматриваемый момент времени, а также
направления отдельных электромагнитных сил, действующих на
проводники. Если = 0, то все электромагнитные силы будут
действовать согласованно. При большем часть электромагнитных сил
создают вращающий момент, направленный по часовой стрелке, а остальные силы — против часовой
стрелки.
Магнитный поток Ф не зависит
от скорости вращения ротора n. Следовательно, вращающий
момент М пропорционален только активной
составляющей тока ротора I2 соs ψ2.
Индуктивное сопротивление
ротора Х2 = 2pfL2, а
следовательно, и величина соs ψ2 зависят от
частоты тока ротора f2 и поэтому
с изменением нагрузки на валу
ротора изменяется не
только величина тока I2, но и
величина соs ψ2.. Таким образом, изменение
вращающего момента, развиваемого
двигателем, с изменением скорости вращения (и скольжения) определяется
одновременно как изменением
тока I2, так и
изменением соs ψ2.
На
основании математического анализа
и экспериментального исследования
можно построить график зависимости вращающего
момента асинхронного двигателя М от скольжения S (рис. 256). Так как каждому
значению S
соответствует определенное
значение n = n0 (1 — S), то указанный
график можно представить
и как зависимость вращающего момента от скорости n. Зависимость
между вращающим моментом М и
скольжением S называется механической характеристикой
двигателя (рис. 256)
На кривой А видно, что в начальный момент пуска,
когда S= 1 и n = 0, вращающий пусковой
момент двигателя относительно невелик. Это
объясняется тем, что в момент пуска частота тока в обмотке
ротора наибольшая и индуктивное сопротивление обмотки велико.
Вследствие этого соs ψ2 имеет малое значение (около 0,1—0,2). Поэтому, несмотря
на большую величину пускового тока, пусковой вращающий момент будет наибольшим.
По мере разгона двигателя скольжение уменьшается.
При
некотором скольжении S1,
называемом критическим, вращающий
момент двигателя будет иметь максимальное значение. При
дальнейшем уменьшении скольжения (или, иначе говоря, при дальнейшем
увеличении скорости вращения двигателя) вращающий момент
будет быстро уменьшаться и при скольжении S = 0 момент
двигателя будет равен нулю.
Этот режим соответствует идеальному холостому ходу,
когда двигатель не нагружен, а механическими потерями (на трение)
можно пренебречь.
Пусковой момент можно увеличить, если в момент
пуска уменьшить сдвиг фаз между током и
э. д. с. ротора. Если увеличить активное
сопротивление цепи ротора, то угол ψ2
уменьшится, что приведет к тому,
что соs ψ2 и вращающий
момент двигателя станут больше.

Этим пользуются на практике
для увеличения пускового вращающего момента двигателя. В
момент пуска в цепь ротора вводят активное
сопротивление (пусковой реостат), которое затем выводят по мере разгона двигателя.
Увеличение пускового момента
приводит к тому, что максимальный
вращающий момент двигателя получается при большем скольжении
(точка S2 кривой В на рис.
256). Путем увеличения активного сопротивления цепи ротора при пуске можно
добиться того, что максимальный
вращающий момент
будет в момент пуска (S = 1 кривой С).
Вращающий момент,
развиваемый асинхронным двигателем, как указывалось, зависит от
величины магнитного потека Ф. При снижении приложенного напряжения U1 уменьшается
магнитный поток Ф, а следовательно, и вращающий момент,
развиваемый двигателем при данной
скорости вращения.
Теория и
практика показывают, что вращающий момент асинхронного
двигателя пропорционален квадрату напряжения, поэтому даже небольшое уменьшение
напряжения сети сопровождается резким уменьшением момента.
Кривая А называется естественной механической характеристикой, а кривые В и С — реостатным и механическими характеристиками
асинхронного двигателя.
Работе двигателя с
номинальной нагрузкой соответствует точка N на кривой А.
При
скольжении SН двигатель
развивает номинальный момент Мн.
Ранее было указано, что путем
увеличения активного сопротивления цепи
роторной обмотки можно увеличить вращающий момент Двигателя.
Можно было бы сделать роторную обмотку большего сопротивления, но это вызвало
бы значительный нагрев обмотки и
уменьшение к. п. д. двигателя. Для улучшения пусковых характеристик
асинхронных двигателей с короткозамкнутым ротором применяют
двигатели с двумя короткозамкнутыми обмотками на роторе и двигатели с глубоким
пазом.
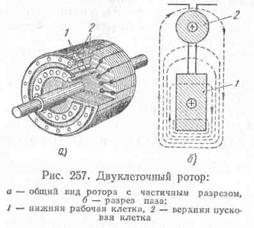
Двигатель с
двумя клетками (короткозамкнутыми обмотками) был
предложен Доливо-Добровольским. На роторе такого двигателя помещают две клетки (рис. 257):
одну — пусковую, имеющую большое
активное сопротивление и малое индуктивное сопротивление, и другую — рабочую,
обладающую наоборот, малым активным сопротивлением и большим
индуктивным сопротивлением.
Стержни
пусковой клетки изготовляют обычно из латуни. Материалом
рабочей клетки служит медь. Сечение рабочей клетки делается больше
сечения пусковой клетки. В результате подбора материала и
сечения клеток активное сопротивление пусковой клетки получается в
четыре — пять раз больше сопротивления рабочей клетки.
Как видно
на рис. 257, б, между
стержнями пусковой и рабочей обмоток имеется узкая щель,
размеры которой
определяют индуктивность нижней рабочей
клетки. Рассмотрим работу двуклеточного двигателя.
Индуктивность
рабочей клетки больше, так как она сцеплена с большим числом магнитных линий,
В момент пуска двигателя,
когда частота токов ротора равна частоте сети, индуктивное сопротивление этой
клетки особенно велико.
Благодаря этому сдвиг фаз между током рабочей клетки и э. д. е.,
индуктированной в ней, будет большим, а момент вращения,
создаваемый клеткой, — малым. Ввиду большого активного сопротивления и малой
индуктивности верхней пусковой клетки ток и э. д.
с, индуктированные в ней, будут незначительно сдвинуты по фазе, и
вращающий момент,
развиваемый пусковой
клеткой, будет большим. Следовательно, при пуске вращающий момент двигателя получается преимущественно за счет пусковой
клетки.
С увеличением скорости двигателя
частота токов ротора уменьшается, индуктивное
сопротивление клеток
оказывает на работу двигателя все меньшее влияние
и поэтому распределение токов
в клетках определяется только их активным сопротивлением.
Но, как было указано выше,
активное сопротивление рабочей клетки в несколько
раз меньше сопротивления пусковой клетки. Поэтому при
нормальной работе двигателя большая часть тока проходит по рабочей клетке и вращающий
момент получается преимущественно за счет
рабочей клетки.
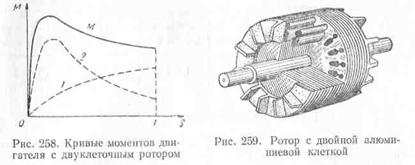
На рис. 258
показана зависимость вращающего момента двигателя с
двуклеточным ротором от величины скольжения. На диаграмме кривая 1 показывает изменение
момента, создаваемого пусковой обмоткой,
кривая 2 — изменение
момента, создаваемого рабочей обмоткой. Сумма мгновенных
значений моментов двух обмоток дает кривую М момента двуклеточного
двигателя.
Более простым в изготовлении
является ротор, у которого обе клетки заливают алюминием. На
рис. 259 показаны внешний вид и
частичный разрез ротора с двойной литой алюминиевой клеткой.
Двуклеточный двигатель дороже
асинхронного двигателя с короткозамкнутым ротором
обычной конструкции на 20—30%. Наши заводы изготовляют двуклехочные двигатели
от 5 до 2000 квт.
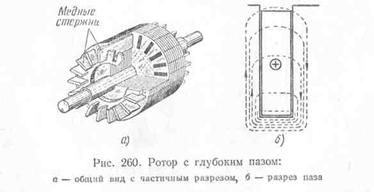
Наряду с
двуклеточным двигателем применяются двигатели с глубоким пазом (рис. 260).
Отношение длины паза к ширине берется в пределах
10—12. Нижняя часть паза сцеплена с большим числом магнитных линий, чем верхняя
часть паза. Вследствие этого индуктивное сопротивление нижней части
паза больше, чем
верхней,
в особенности в момент пуска.
Это приводит к вытеснению тока ротора в
верхнюю часть стержней обмотки. Плотность тока в верхних слоях
стержня увеличивается, что равносильно уменьшении сечения
стержней и увеличению активного сопротивления обмотки. Это, как известно,
приводит к увеличению вращающего моменте двигателя.
Кроме того, увеличение индуктивного и активного сопротивления обмотки ротора
вызывает уменьшение пускового тока.
С увеличением скорости
двигатель приобретает свойства, соответствующие его обычной
конструкции.
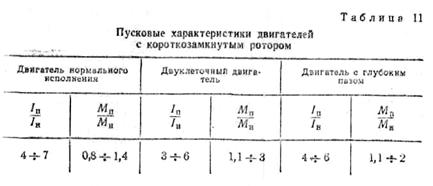
В табл. 11 приведены пусковые
характеристики двигателя с короткозамкнутым ротором нормального исполнения, двуклеточного двигателя и
двигателя с глубоким пазом. Пусковые свойства даются в виде отношения
пускового тока Iп к
номинальному току Iн и в виде отношения
пускового момента Мn к номинальному моменту Мн.
| 