<< Предыдущая |
Содержание |
Следующая >>
Характеристики двигателей постоянного тока
§ 115. ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Рабочие свойства двигателей
определяются их рабочими характеристиками,
представляющими собой зависимости
числа оборотов т, вращающего
момента Мэ, потребляемого тока
I, мощности Р1 и
к. п. д. η от полезной мощности на валу Р2- Эти зависимости соответствуют
естественным условиям работы двигателя, т. е. машина не регулируется и
напряжение сети остается постоянным. Так
как при изменении полезной
мощности Р2 (т. е. нагрузки на валу) изменяется также и ток в якоре
машины, то рабочие характеристики
часто строятся в зависимости от тока в якоре. Зависимости вращающего момента и
скорости вращения от тока в якоре для двигателя параллельного возбуждения
изображены на рис. 152, а схема сто показана выше (см. рис. 151).
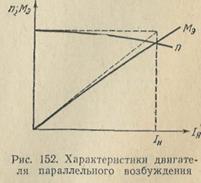
Число оборотов двигателя
определяется следующим выражением:

>С
увеличением нагрузки на валу двигателя увеличивается так же и ток в якоре. Это
вызывает увеличение падения напряжения» сопротивлении обмотки якоря и щеточных
контактах.
Так как ток возбуждения
остается неизменным (машина нерегулируема), то магнитный поток также постоянен.
Однако при увеличении тока в якоре увеличивается размагничивающее действие
потока реакции якоря и магнитный поток Ф несколько уменьшится. Увеличение
Iяrя вызывает
уменьшение скорости двигателя, а уменьшение Ф увеличивает скорость. Обычно
падение напряжения влияет на изменение скорости в несколько большей степени,
чем реакция якоря, так что с увеличением тока в якоре скорость уменьшается.
Изменение скорости у двигателя этого типа незначительно и не превышает 5% при
изменении нагрузки от нуля до номинальной, т. е. двигатели параллельного
возбуждения имеют жесткую скоростную характеристику.

При неизменном
магнитном потоке зависимость
момента от тока в якоре
представится прямой линией. Но под воздействием
Вращающий момент двигателя реакции якоря с увеличением нагрузки
происходит некоторое уменьшение магнитного потока и зависимость момента пойдет
несколько ниже прямой линии.
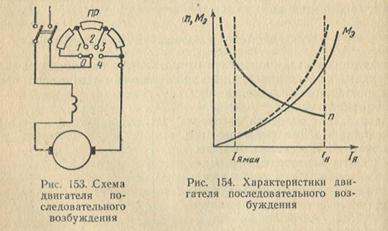
Схема двигателя последовательного
возбуждения показана на рис. 153. Пусковой реостат этого двигателя имеет только
два зажима, так как обмотка возбуждения и якорь образуют одну последовательную
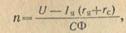
цепь. Характеристики двигателя изображены на рис. 154. Число оборотов двигателя
последовательного возбуждения определяется следующим выражением:
где
rс— сопротивление последовательной обмотки возбуждения.
В двигателе последовательного возбуждения магнитный поток не остается
постоянным, а резко изменяется с изменением нагрузки, что вызывает
значительное изменение скорости. Так как падеже напряжения в сопротивлении
якоря и в обмотке возбуждения очень мало в сравнении с приложенным напряжением,
то число оборотов можно приближенно
определить следующим выражением:

Если пренебречь насыщением
стали, то можно считать магнитный поток пропорциональным току в обмотке
возбуждения, который равен току в якоре. Следовательно, у двигателя
последовательного возбуждения скорость вращения обратно пропорциональна току в
якоре и число оборотов резко уменьшается с увеличением нагрузки, т. е.
двигатель имеет мягкую скоростную характеристику. С уменьшением нагрузки
скорость вращения двигателя увеличивается. При холостом ходе (Iя=0) скорость двигателя беспредельно возрастает, т.
е. двигатель идет в разнос.
Таким образом, характерным
свойством двигателей последовательного возбуждения является недопустимость
сброса нагрузки, т. е. работы вхолостую или при малых нагрузках. Двигатель
имеет минимальную допустимую нагрузку, составляющую 25—30% номинальной. При
нагрузке меньше минимально допустимой скорость двигателя резко увеличивается,
что может вызвать его разрушение. Поэтому, когда возможны сбросы или резкие
уменьшения нагрузки, использование двигателей последовательного возбуждения является
недопустимым.
В двигателях очень малых
мощностей сброс нагрузки не вызывает разноса, так как механические потери
двигателя будут достаточно большой нагрузкой для него.
Вращающий момент двигателя
последовательного возбуждения, учитывая пропорциональную зависимость между
магнитным потоком и током в якоре (Ф = С'Iя), можно определить следующим выражением:

где K’=KC’
т.е. вращающий момент
пропорционален квадрату тока. Однако при больших токах сказывается насыщение
стали и зависимость момента приближается к прямой линии. Таким образом
двигатели этого типа развивают большие вращающие моменты при малых
оборотах, что имеет
существенное значение при пуске больших инерционных масс и
перегрузках. Эти двигатели широко используют в транспортных и подъемных устройствах.
При смешанном возбуждении
возможно как согласное, так и встречное включение обмоток возбуждения.
Двигатели со встречным
включением обмоток не нашли широкого применения, так как они обладают плохими
пусковыми свойствами и работают неустойчиво.
Скоростные характеристики
двигателей смешанного возбуждения занимают промежуточное положение между
характеристиками двигателей
параллельного и последовательного возбуждения.
С увеличением тока в якоре
число оборотов якоря уменьшается в большей мере, чем для двигателей
параллельного возбуждения, за счет увеличения магнитного потока, вызываемого
увеличением тока в последовательной обмотке возбуждения. При холостом ходе
двигатель смешанного возбуждения не идет вразнос, так как магнитный поток не
уменьшается до нуля из-за наличия параллельной обмотки возбуждения.
При увеличении нагрузки в
двигателях смешанного возбуждения увеличивается магнитный поток и вращающий
момент возрастает в большей мере, чем в двигателях параллельного возбуждения,
но в меньшей мере, чем в двигателях последовательного возбуждения.
<< Предыдущая |
Содержание |
Следующая >>
| 