<< Предыдущая |
Содержание |
Следующая >>
Регулирование скорости вращения трехфазных асинхронных двигателей
§ 97. РЕГУЛИРОВАНИЕ СКОРОСТИ ВРАЩЕНИЯ
ТРЕХФАЗНЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Число оборотов ротора в
минуту определяется следующим выражением:

Из выражения (122) видно, что
число оборотов ротора можно регулировать изменением любой из трех величин,
определяющих число оборотов ротора, т. е.изменением частоты тока сети
f1 числа пар полюсов р и скольжения
S.
Регулирование скорости
асинхронных двигателей изменением частоты тока сети сложно, так как необходим
какой-либо регулирующий преобразователь частоты или генератор. Поэтому такой способ
не имеет широкого применения.
Изменение числа полюсов
машины возможно либо выполнением на статоре нескольких (обычно двух) обмоток с различным числом полюсов, либо одной обмотки, допускающей
переключение на Различное число полюсов. Может быть помещено на статоре две обмотки,
каждая из которых допускает переключение на различное число полюсов.
На рис 120 а схематически
показаны две катушки одной фазы, соединенные последовательно. Ток, протекая по
ним, создает магнитное поле с четырьмя полюсами.
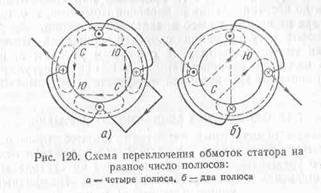
Если изменить направление
тока в одной из катушек, включив ее встречно с другой, то обмотка будет
создавать двухполюсное магнитное поле (рис. 120, б). При изменении числа
полюсов обмотки статора изменится скорость вращения его магнитного поля, а
следовательно, и скорость вращения ротора двигателя. Этот способ регулирования
скорости асинхронного двигателя экономичен, но недостатком его является
ступенчатое изменение скорости. Кроме того, стоимость такого двигателя
значительно возрастает вследствие усложнения обмотки статора и увеличения
габаритов машин. Регулирование скорости изменением числа полюсов применяется в
двигателях с короткозамкнутым ротором; в двигателях с контактными кольцами
этот способ не используется, так как здесь одновременно с изменением числа
полюсов обмотки статора необходимо в той же мере изменить число полюсов
обмотки вращающегося ротора, что весьма сложно.
Заводы СССР выпускают двух-,
трех- и четырехскоростные двигатели, например, на синхронные скорости вращения
500—750 — 1000—1500 об/мин. Такие двигатели имеют на статоре две обмотки,
каждая из которых допускает переключение на различное число полюсов.
Изменить скольжение можно
введением в цепь обмотки ротора регулировочного реостата, а также изменением
напряжения сети. При изменении напряжения питающей сети изменяется вращающий
момент двигателя, пропорциональный квадрату напряжения. При уменьшении
вращающего момента начнет уменьшаться число оборотов ротора, т. е. увеличится
скольжение.
Регулировочный реостат включается в цепь обмотки
фазного ротора подобно пусковому реостату, но в отличие от пускового этот,
реостат рассчитывается на длительное прохождение тока.
При включении регулировочного
реостата сила тока в роторе уменьшится, что вызовет уменьшение вращающего
момента двигателя и, следовательно, уменьшение скорости вращения или увеличение
скольжения. При увеличении скольжения увеличивается э. д. с и ток в роторе.
Скорость вращения или скольжения будет изменяться до восстановления равновесия
моментов, т. е. пока сила тока в роторе не примет своего начального значения.
Этот способ регулирования
скорости вращения может быть использован только в двигателях с фазным ротором
и, несмотря на то, что является неэкономичным (так как в регулировочном
реостате происходит значительная потеря энергии), имеет широкой применение.
<< Предыдущая |
Содержание |
Следующая >>
| 