|
назад | оглавление | вперед
1.2.2 Статические характеристики АД при питании от источника напряжения
Уравнения Кирхгофа для статического режима АД можно получить
как частный случай из уравнений АД в синхронной
системе координат, используя уравнения
потокосцеплений статора и ротора, представленные через основное
потокосцепление  и потокосцепления рассеяния статора и
ротора и потокосцепления рассеяния статора и
ротора  и и

 . .
Учитывая, что в статическом режиме  , а также, что , а также, что  , получим , получим
 , ,
где  и и  – индуктивные сопротивления
рассеяния при частоте статора – индуктивные сопротивления
рассеяния при частоте статора  . .
Разделим уравнение ротора на скольжение  , тогда , тогда
 . (1) . (1)
Величина  представляет собой ЭДС, создаваемую
основным магнитным потоком представляет собой ЭДС, создаваемую
основным магнитным потоком  , поэтому уравнения (1) можно
представить в виде , поэтому уравнения (1) можно
представить в виде
 . (2) . (2)
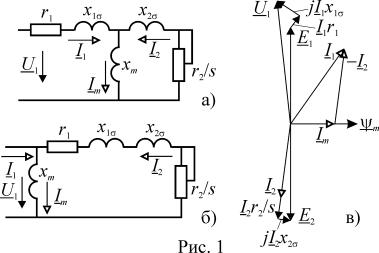 Уравнения (1-2) представляют собой традиционные уравнения
и их можно представить двумя графическими формами – схемой замещения и
векторной диаграммой (рис. 1). Обычно для упрощения вычислений без внесения
существенной погрешности ветвь намагничивания выносят на вход схемы замещения
(рис. 1 б). Тогда ток ротора будет равен Уравнения (1-2) представляют собой традиционные уравнения
и их можно представить двумя графическими формами – схемой замещения и
векторной диаграммой (рис. 1). Обычно для упрощения вычислений без внесения
существенной погрешности ветвь намагничивания выносят на вход схемы замещения
(рис. 1 б). Тогда ток ротора будет равен
 , (3) , (3)
где  – индуктивное сопротивление короткого
замыкания. – индуктивное сопротивление короткого
замыкания.
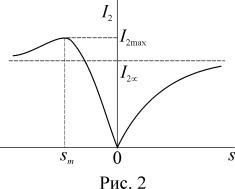 При возрастании скольжения ( При возрастании скольжения ( ) ток ротора
стремится к величине ) ток ротора
стремится к величине  (рис. 2). В генераторном режиме функция (рис. 2). В генераторном режиме функция
 имеет
максимум имеет
максимум  при при
 . .
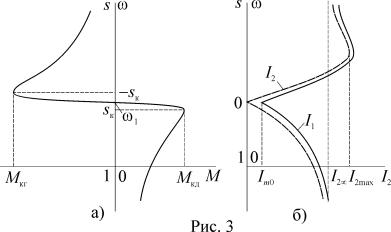
Приравнивая активную мощность, передаваемую через зазор
ротору двигателя  , электромагнитной мощности , электромагнитной мощности  , где , где  , получим
уравнение статической механической характеристики (рис. 3 а) , получим
уравнение статической механической характеристики (рис. 3 а)
 . (4) . (4)
Эта функция имеет экстремумы при скольжении
 (5) (5)
называемом критическим, т.к. при этом скольжении АД переходит
на статически неустойчивый участок характеристики или, как говорят,
«опрокидывается». Использование приближенного равенство для критического
скольжения не вносит существенной погрешности в анализ, т.к. у АД общего
применения  . .
Подставляя выражение (4) в (3), получим выражение для
критического момента
 . (6) . (6)
Критический момент в двигательном режиме определяет
перегрузочную способность АД, а т.к. его значение зависит от квадрата
приложенного напряжения, то при снижении напряжения на допустимые ГОСТом 10%,
момент уменьшится на 20% и это следует учитывать при выборе двигателя. В справочных данных для АД обязательно приводится коэффициент
перегрузочной способности соответствующий номинальному напряжению  . Отсюда
предельно допустимый момент равен . Отсюда
предельно допустимый момент равен  . .
 Положительный знак в (6) соответствует
двигательному режиму, а отрицательный – генераторному. Поэтому в генераторном
режиме критический момент больше, чем в двигательном. Отношение критических
моментов равно Положительный знак в (6) соответствует
двигательному режиму, а отрицательный – генераторному. Поэтому в генераторном
режиме критический момент больше, чем в двигательном. Отношение критических
моментов равно
и для двигателей серии 4А в зависимости от мощности
составляет от 3,0 до 1,3, причем, меньшие значения соответствуют большей
мощности.
Делением выражения (4) на (6) можно получить уравнение
механической характеристики АД в виде формулы Клосса
 , (7) , (7)
где  . Приближенное выражение не учитывает
различие критических моментов и для машин с критическим скольжением . Приближенное выражение не учитывает
различие критических моментов и для машин с критическим скольжением  в
двигательном режиме дает погрешность около 10-15%. в
двигательном режиме дает погрешность около 10-15%.
Из выражения (7) следует, что в области малых скольжений ( ) )  , и
характеристика близка к линейной, а при , и
характеристика близка к линейной, а при  – –  , и характеристика практически
гиперболическая. , и характеристика практически
гиперболическая.
Короткозамкнутые АД обычно запускаются прямым включением в
сеть и развивают при этом момент
 . (8) . (8)
Для получения высокого КПД АД должны работать при номинальной
нагрузке с малым скольжением. Это требование вступает в противоречие с
требованием получения достаточно высокого пускового момента. Из выражения (7)
при  и и
 можно
получить выражение для кратности пускового момента в виде можно
получить выражение для кратности пускового момента в виде
 . .
Для АД с номинальным скольжением 0,03 и критическим 0,1 эта
кратность составит 0,36, т.е. такой двигатель может запускаться только на
холостом ходу или при работе на вентиляторную нагрузку. По ГОСТ кратность
пускового момента должна быть не менее 0,7–1,8 Причем, меньшие значения
относятся к двигателям большей мощности. Повышение пускового момента АД
достигается использованием явления вытеснения тока в стержнях ротора, в
результате чего, кратность пускового момента повышается до 1,1–2,3.
Другая проблема с пуском АД возникает вследствие больших
пусковых токов. Электромеханическая характеристика АД показана на рис.
3 б. Зависимость  получена из выражения (3)
и соотношения получена из выражения (3)
и соотношения  . Функция . Функция  по характеру соответствует по характеру соответствует  , т.к. токи
статора и ротора связаны отношением , т.к. токи
статора и ротора связаны отношением  . Наибольшее отклонение . Наибольшее отклонение  от от  наблюдается
в режиме холостого хода, а по мере увеличения нагрузки кривые токов статора и
ротора сближаются. В соответствии со стандартом, кратность пускового тока по
отношению к номинальному не должна превышать 5,5-7,0. Однако эти значения могут
быть недопустимыми для питающей сети, особенно, если речь идет о машинах
большой мощности. В этом случае для регулируемых приводов с преобразователями
частоты используют пуск с постепенным увеличением частоты питания, а для
нерегулируемых – устройства «мягкого» пуска на основе тиристорных регуляторов
тока. наблюдается
в режиме холостого хода, а по мере увеличения нагрузки кривые токов статора и
ротора сближаются. В соответствии со стандартом, кратность пускового тока по
отношению к номинальному не должна превышать 5,5-7,0. Однако эти значения могут
быть недопустимыми для питающей сети, особенно, если речь идет о машинах
большой мощности. В этом случае для регулируемых приводов с преобразователями
частоты используют пуск с постепенным увеличением частоты питания, а для
нерегулируемых – устройства «мягкого» пуска на основе тиристорных регуляторов
тока.
назад | оглавление | вперед
| 