|
Содержание Главная (библиотека)
Предыдущий § Следущий
3-29. Асинхронные машины для синхронной связи
На практике иногда необходимо иметь согласованное вращение двух или нескольких механизмов, удаленных один от другого на большое расстояние или установленных таким образом, что механическое соединение их, например, при помощи общего ва-
ла невозможно или нецелесообразно. Можно в этих случаях использовать трехфазные асинхронные машины с контактными кольцами, которые при определенной схеме их соединения позволяют без общего механического вала осуществить согласованное вращение механизмов (или синхронную связь между ними). Такие асинхронные машины образуют «электрический вал». Схема их соединения называется схемой электрического вала.
Рассмотрим наиболее часто применяемую схему электрического вала, представленную на рис. 3-112. Здесь показаны два приводных двигателя Д1 и Д2, которые связаны с рабочими механизмами через вал I и вал II.
Чтобы иметь согласованное вращение механизмов и, следовательно, приводных двигателей, с ними механически соединяются асинхронные машины с контактными кольцами А и В. Статорные обмотки последних приключаются к одной и той же сети трехфазного тока, а роторные обмотки соединяются параллельно через контактные кольца. При такой схеме включения машин А и В они будут выравнивать нагрузки двигателей ДI и ДII и в то же время поддерживать синхронное вращение обоих валов.
Когда машины неподвижны, то при одинаковом положении роторов относительно статоров они аналогичны двум параллельно включенным трансформаторам при их работе вхолостую. Если повернуть ротор одной машины при неподвижном роторе другой, то в роторных и соответственно в статорных обмотках возникнут токи. Они создадут в машинах вращающие моменты, которые будут направлены таким образом, чтобы восстановить прежнее положение роторов относительно статоров. Следовательно, на вал каждой машины будет действовать синхронизирующий момент, который будет возрастать с углом поворота ротора, но
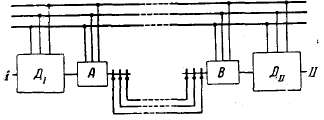 Рис. 3-112. Схема электрического вала.
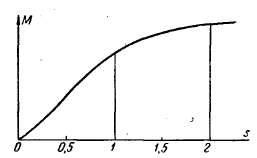 Рис. 3-113. Момент электрического вала в зависимости от скольжения.
до известного предела. Если перейти этот предел, то синхронная связь между валами нарушается. Можно считать, что электрический вал осуществляет как бы эластичную связь между рабочими механизмами.
Передача момента при электрическом вале (как и при эластичном механическом) возможна не только при покое двух роторов, но и при их вращении, причем синхронная связь между ними будет сохраняться, если вследствие сдвига по фазе э. д. с. роторов будут возникать токи, необходимые для создания синхронизирующих моментов. В этом отношении получается существенное различие при вращении роторов по полю и против поля. Если роторы вращаются в направлении вращения поля, синхронизирующий момент при s≈0 будет очень мал; если они вращаются против поля, возможна передача больших моментов при широких пределах изменения скорости вращения (рис. 3-113).
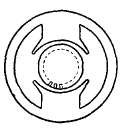 Рис. 3-114. Листы статора и ротора однофазного сельсина.
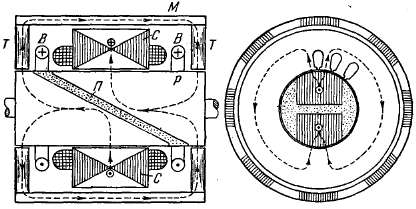 Рис. 3-115 Схема устройства бесконтактного сельсина.
ляют собой асинхронные машины с контактными кольцами, имеющие обычно на роторе трехфазную обмотку и на статоре однофазную или трехфазную. Однофазная обмотка статора часто выполняется в виде двух катушек, надетых на два явновыраженных полюса. Она получает питание от источника однофазного тока и называется обмоткой возбуждения. В этом случае сельсины называются однофазными. Трехфазная распределенная обмотка ротора соединяется в звезду. Она называется обмоткой синхронизации.
Статор и ротор такого сельсина собираются из листов электротехнической стали (рис. 3-314), причем ротор делается со скошенными пазами для ослабления зубцовых гармоник в кривых э. д. с. На контактные кольца накладываются щетки, обеспечивающие надежный контакт и малое переходное сопротивление.
В настоящее время широкое применение нашли себе бесконтактные сельсины, первые типы которых были разработаны в Советском Союзе А. Г. Иосифьяном и Д. В. Свечарником. Эти сельсины не имеют скользящих контактов, что повышает надежность и точность их работы.
Устройство бесконтактного сельсина схематически представлено на рис. 3-115*. Здесь ротор Р состоит из двух пакетов, набранных из листовой стали и разделенных косым промежутком П, заполненным немагнитным материалом. Листы ротора расположены параллельно оси вала, как показано на рисунке справа. Оба пакета зали-
* См. Ю. С. Чечет, «Электрические микрома-шины автоматических устройств», Госэнергоиздат, 1957.
ваются алюминиевым сплавом и вместе с ним обрабатываются в виде цилиндра. Ротор не имеет никакой обмотки. Статор состоит из основного пакета С и двух боковых колец (тороидов) Т. Основной пакет статора С имеет пазы, в которых уложена трехфазная обмотка синхронизации. Она выполняется так же, как в обычной двухполюсной асинхронной машине. К тороидам примыкают пакеты внешнего магнитопро-вода М, набранные из полосок электротехнической стали. Они заливаются алюминиевым сплавом и образуют наружный цилиндрический корпус. Между тороидами и основным статор-ным пакетом помещаются кольцевые катушки В, охватывающие ротор. Они соединяются последовательно и образуют обмотку возбуждения. Как и в случае контактных сельсинов, обмотка возбуждения приключается к однофазной сети, а обмотка синхронизации — к линии связи.
Для выяснения принципа работы бесконтактного сельсина проследим путь магнитного потока, созданного катушками обмотки возбуждения. Примем, что в данный момент времени ток в катушках направлен, как указано на рис. 3-115. Тогда поток будет направлен справа налево. В правой части поток пойдет по стали ротора в аксиальном направлении до промежутка П, где он повернет и пойдет вверх через зазор между ротором и основным пакетом статора С. Затем, пройдя зубцовый слой статора, поток поворачивает за плоскость чертежа (показано крестиком в кружке) и проходит вдоль ярма статора в его нижнюю часть (точка в кружке), откуда, снова пройдя зубцовый слой статора и зазор, он поступает в ротор, но уже
слева от промежутка П. Далее, пройдя левую часть ротора, поток разделяется на две части и через тороиды и маг-нитопровод возвращается в правую часть ротора. Следовательно, поток, проходя через зубцовый слой статора, будет сцепляться с обмоткой синхронизации. Если поворачивать ротор, то потокосцепления фаз этой обмотки будут изменяться так же, как при повороте ротора контактного сельсина. По принципу действия бесконтактный и контактный сельсины не отличаются один от другого.
В зависимости от назначения и режимов работы различают: сельсины, работающие в индикаторном режиме; сельсины, работающие в трансформаторном режиме, и дифференциальные сельсины.
 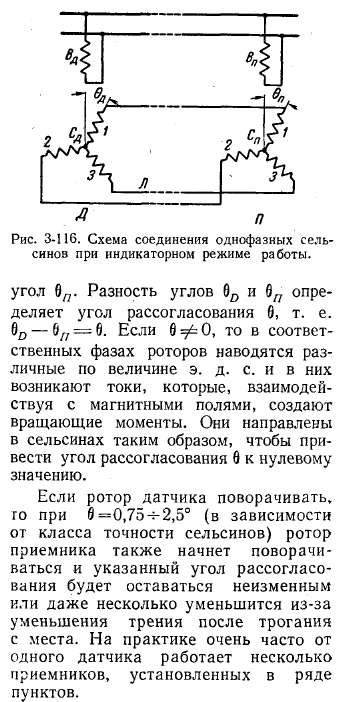
При работе сельсинов в индикаторном режиме синхронный поворот или синхронное вращение передается обычно только на стрелку индикатора, посаженную непосредственно на вал сельсина-приемника. Здесь сельсин-приемник является в то же время исполнительным механизмом, требующим очень небольшого вращающего момента.
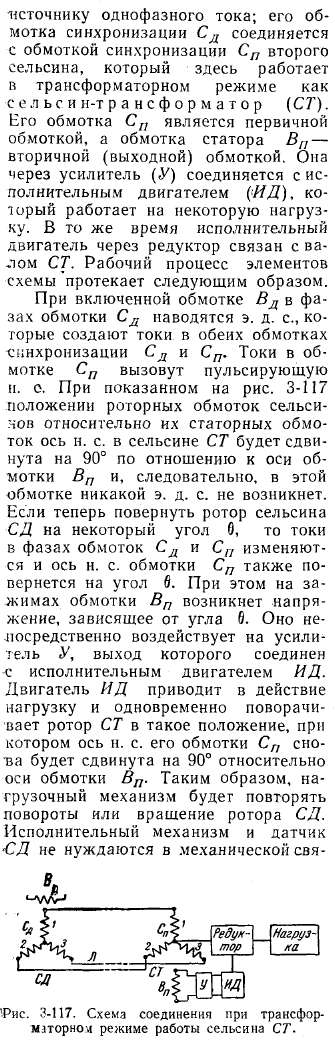
Если необходимо осуществить ту же передачу, но к механизму, требующему относительно большого вращающего момента, то используется схема, представленная на рис. 3-117. На этой схеме показаны сельсины, не отличающиеся по устройству от ранее рассмотренных. Обмотка возбуждения сельсина-датчика (СД) приключается к
Содержание Главная (библиотека)
Предыдущий § Следущий
| 