|
Содержание
Предыдущий § Следующий
7.6. Современные способы регулирования частоты вращения электродвигателей постоянного тока
Принципы регулирования частоты вращения в двигательном режиме, описанные в § 7.3, 7.4, 7.5, реализуются в четырех основных способах регулирования:
1) реостатно-контакторное регулирование;
2) регулирование по системе «генератор — двигатель»;
3) регулирование по системе «управляемый выпрямитель — двигатель»;
4) импульсное регулирование.
Подробно эти способы регулирования исследуются в курсах электропривода и теории автоматического регулирования. Здесь же оудут рассмотрены только основные положения, имеющие непосредственное отношение к теории электрических машин.
Реостатно-контакторное регулирование. В настоящее время это управление широко применяется для регулирования частоты вращения двигателей малой и средней мощности, а иногда (на железнодорожном транспорте) и для мощных двигателей.
Обычно при реостатно-контак- + о_-р торном управлении используются два метода регулирования: 1) при частотах вращения, меньших номинальной, в цепь якоря
включают дополнительные сопро- Рис. 7 28. Схема реостатно-контак-тивления; 2) при повышенных торного регулирования частоты вра-частотах вращения регулируют щения ^Bl)raTe-™ с последовательным
ток возбуждения.
Машины малой мощности
при отсутствии автоматизированного управления имеют два пол-зунковых регулировочных реостата, один из которых включен в цепь якоря, а другой — в цепь возбуждения. При больших мощностях, а также при необходимости автоматизации процесса сопротивления изменяют ступенчато (рис. 7.28) с помощью контакторов. Если требуется точное регулирование, то контакторов должно быть очень много, вся установка становится громоздкой, дорогой и сравнительно малонадежной.
Реостатно-контакторная система при двигателях с параллельным возбуждением позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения. В зоне низких частот вращения применяют реостатное торможение, причем регулирование тормозного усилия осуществляют с помощью той же реостатно-контакторной установки, которая регулирует двигательный режим, после соответствующего переключения схемы.
В связи со сложностью автоматизации и большими расходами на ремонт и эксплуатацию реостатно-контакторное управление в настоящее время постепенно заменяют более совершенными системами управления.
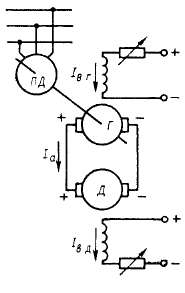
Регулирование по системе «генератор — двигатель». В этой установке (рис. 7.29) двигатель Д получает питание от автономного генератора Г с независимым возбуждением, который приводится во вращение каким-либо первичным двигателем ПД (например, электродвигателем, дизелем) Регулирование частоты вращения осуществляют изменением:
1) напряжения на якоре двигателя путем изменения тока возбуждения генератора /вГ;
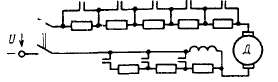 Рис. 7 28. Схема реостатно-контак-торного регулирования частоты вращения двигателя с последовательным возбуждением
2) магнитного потока двигателя путем регулирования тока возбуждения двигателя /в.д.
Пуск в ход и получение низких частот вращения производят при максимальном токе возбуждения двига1еля, но при уменьшенном токе возбуждения генератора, т. е. при пониженном напряжении. Ослабление магнитного потока двигателя (уменьшение его тока возбуждения) производят только после того, как исчерпана возможность повышения напряжения, т. е. когда установлен максимальный ток возбуждения генератора. Изменение направления вращения двигателя производят переменой полярности подводимого к якорю напряжения, для чего меняют направление тока в обмотке возбуждения генератора.
Система «генератор — двигатель» выгодно отличается тем, что в ней отсутствуют силовые контакторы, реостаты и т. п. Управление легко поддается автоматизации, так как осуществляется путем регулирования сравнительно небольших токов возбуждения.
Установки типа «генератор — двигатель» широко распространены в промышленности и на транспорте, в тех устройствах, где требуется регулирование частоты вращения в широких пределах. В транспортных установках генератор приводится во вращение дизелем, в промышленности — трехфазным синхронным или асинхронным двигателем. Систему «генератор — двигатель» широко применяют в металлургической промышленности для привода прокатных станов с двигателями мощностью 10 МВт и более при диапазоне регулирования частоты вращения 1 : 200 и точности поддержания заданной частоты вращения (погрешности) менее 1%.
В рассматриваемой системе уменьшение частоты вращения производят с использованием рекуперативного торможения: сначала увеличивая ток возбуждения двигателя, а затем постепенно уменьшая ток возбуждения генератора, можно перевести двигатель в генераторный режим и быстро затормозить механизм. При этом накопленная кинетическая энергия якоря и механизма отдается в электрическую сеть.
Если нагрузка толчкообразная, то иногда на валу первичного двигателя, вращающего генератор, ставят маховик, который уменьшает перегрузки первичного двигателя.
Недостатки системы «генератор — двигатель» — большие масса, габариты, высокая стоимость установки; сравнительно низкий КПД (примерно 0,6 ...0,7), так как производится трехкратное преобразование энергии.
Рис. 7.29. Схема «генератор—двигатель»
В последнее время на транспорте (в тепловозах, больших автомобилях, кораблях) вместо генератора постоянного тока в системе «генератор — двигатель» применяют синхронный генератор с полупроводниковым выпрямителем. Это позволяет снизить массу и уменьшить стоимость генератора. В промышленных установках такое усовершенствование обычно не применяется, так как для рекуперативного торможения требуется управляв-______
мый выпрямитель-инвертор, в связи с чем выгоднее перейти к схеме «управляемый выпрямитель — двигатель», исключив генератор и первичный двигатель.
Регулирование по системе «управляемый выпрямитель — двигатель». Развитие полупроводниковой техники позволило применить для регулирования частоты вращения двигателя управляемый выпрямитель, выполненный на тиристорах, где одновременно с выпрямлением производится регулирование выпрямленного напряжения (рис. 7.30). Применение системы «управляемый выпрямитель — двигатель» позволяет увеличить КПД и уменьшить массу установки.
Если требуется быстрая остановка механизма с последующим реверсированием, то для рекуперативного торможения параллельно с выпрямителем ставят инвертор, т. е. еще один полупроводниковый преобразователь, позволяющий отдавать энергию от машины постоянного тока в сеть переменного тока.
Недостаток системы «управляемый выпрямитель — двигатель» — низкий коэффициент мощности при пониженном выходном напряжении. Кроме того, из-за пульсаций напряжения возникают пульсации тока, что ухудшает работу двигателя: возрастают потери, ухудшается коммутация и т. д. (см. § 7.7). Особенно велики пульсации тока при питании от сети однофазного тока (в электровозах переменного тока), где обеспечение удовлетворительной коммутации — серьезная проблема.
Импульсное регулирование частоты вращения. В последние годы в связи с развитием полупроводниковой техники широко применяют импульсный метод регулирования частоты вращения двигателей постоянного тока, при котором на двигатель с помощью импульсного прерывателя периодически подают импульсы напряжения определенной частоты.
Импульсный преобразователь (рис. 7.31, а) состоит из входного фильтра £фСф, электронного ключа ТК (транзисторного или тири-сторного), обратного диода Д и индуктивности L. В период времени т, когда электронный ключ замкнут (транзистор или тиристор
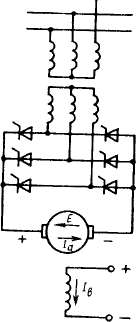 Рис. 7.30. Схема «управляемый выпрямитель—двигатель»
открыт), питающее напряжение U подается полностью на якорь двигателя, и его ток ia увеличивается (рис. 7.31, б); когда электронный ключ разомкнут (транзистор или тиристор заперт), ток ia продолжает проходить через якорь двигателя и обратный диод Д под действием электромагнитной энергии, запасенной в индуктивностях (La + L) цепи якоря; при этом ток ia уменьшается. Частоты следования импульсов при номинальном режиме обычно составляет 200... 400 Гц, вследствие чего период Т примерно на два порядка меньше постоянной времени цепи якоря. Поэтому за время импульса т ток в двигателе не успевает значительно возрасти, а за время паузы (Т— —т) —уменьшиться.
Среднее напряжение, подаваемое на обмотку якоря,
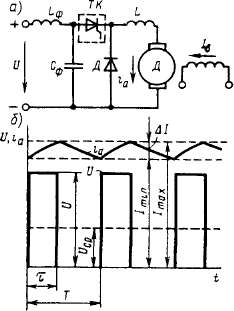 где La + L — индуктивность цепи якоря двигателя.
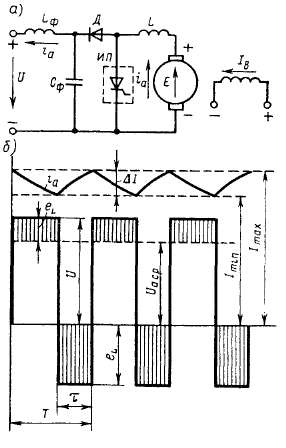
Если параметры схемы выбраны так, что пульсация тока не превосходит 5... 10%, то работа двигателя обычно удовлетворительна. Скоростные и механические характеристики двигателя /, 2 и 3 (рис. 7.32), полученные при различных коэффициентах регулирования а в таком режиме работы аналогичны соответствующим характеристикам двигателя при изменении питающего напряжения U.
При уменьшении нагрузки двигателя с параллельным возбуждением возрастают пульсации тока якоря, и при некоторой критической нагрузке наступает режим прерывистых токов. Поскольку /а = 0 при E—U, частота вращения при идеальном холостом ходе По=и/(сеФ) не зависит от времени т, т. е. от коэффициента регулирования напряжения а. Благодаря этому при некоторой критической частоте вращения лкр, когда двигатель переходит в режим пре-
 Рис. 7.31. Схема импульсного регулирования двигателя постоянного тока (а) и графики изменения напряжения и тока (б)
Изменение тока при работе импульсного прерывателя A/=/max—1ты определяется по приближенной формуле

рывистых токов, угол наклона скоростных и механических характеристик к оси абсцисс резко изменяется В диапазоне по>п>пКр -)ти характеристики имеют примерно такую же форму, как и при регулировании частоты вращения путем включения реостата в цепь якоря Критическая частота вращения
Рис 7 32 Скоростные и механические характеристики двигателя с параллельным возбуждением при им пульсном регулирова
НИИ
Рис 7 33 Схемы частотно- (а) и широтно-импульсных (б) тиристорных преобразователей для питания двигателей
сти периода Т между подачей управляющих импульсов на электронный ключ ТК при T=const (частотно-импульсное регулирование), либо времени т при постоянном значении Т (широтно-им-пульсное регулирование) Используют также комбинированное регулирование, при котором изменяется как Т, так и т
В настоящее время импульсное регулирование двигателей малой мощности и микродвигателей осуществляется с помощью импульсных прерывателей, в которых коммутирующими элементами являются транзисторы Для регулирования двигателей средней и большой мощностей применяются прерыватели с тиристорами Так как тиристор, в отличие от транзистора, не полностью управляемый вентиль, то для его запирания применяются различные схемы искусственной коммутации, обеспечивающие прерывание проходящего тока путем подачи на его электроды обратного напряжения
На рис 7 33 показаны две простейшие схемы импульсных тиристорных прерывателей Схему, изображенную на рис 7 33, а, используют при частотно-импульсном регулировании Тиристор Т отпирается импульсом тока на его управляющий электрод, а запирается
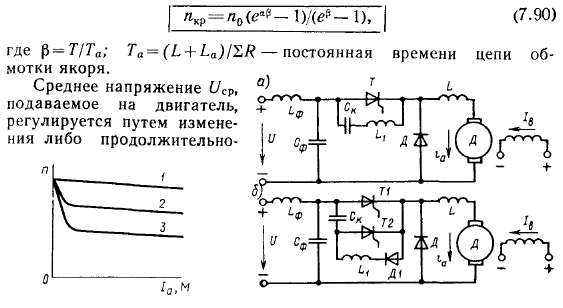
коммутирующим конденсатором Ск. Перед включением тиристора конденсатор Сь заряжен до напряжения UK. При подаче отпирающего импульса на управляющий электрод тиристор 7 открывается и через двигатель начинает проходить ток ia. Одновременно происходит перезаряд конденсатора Сн через резонансный контур, содержащий индуктивность L\. После окончания перезаряда, когда полярность конденсатора меняется, к тиристору прикладывается обратное напряжение. При этом тирисгор восстанавливает свои запирающие свойства и ток через него прекращается. В дальнейшем конденсатор заряжается через нагрузку и схема оказывается подготовленной для последующего отпирания тиристора. Время открытого состояния тиристора определяется параметрами резонансной цепи: Li и С„.
Схема, изображенная на рис. 7.33, б, используется при широтно-импульсном и комбинированном регулировании. В рассматриваемой схеме импульсный прерыватель имеет два тиристора: главный 71 и вспомогательный 72. Главный тиристор 71 запирается коммутирующим конденсатором Ск, подключаемым к тиристору 71 в требуемые моменты времени вспомогательным тиристором 72. После запирания тиристора 71 коммутирующий конденсатор заряжается от источника питания через тиристор 72 и якорь двигателя, а после повторного открытия главного тиристора 71 перезаряжается через цепочку, содержащую индуктивность Lt и диод Д\, и приобретает полярность, требуемую для последующего запирания тиристора 71.
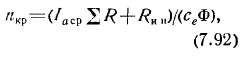
Торможение при импульсном регулировании. При работе двигателя от импульсного прерывателя возможны его рекуперативное и динамическое торможения. Наиболее интересная особенность рекуперативного торможения при импульсном регулировании — возможность осуществления его при ЭДС двигателя, меньшей напряжения сети. В связи с этим рекуперативное торможение может осуществляться почти до полной остановки.
При рекуперативном торможении импульсный прерыватель ИП включают параллельно якорю двигателя, диод Д — между якорем и питающей сетью (рис. 7.34, а). При отпирании прерывателя ИП якорь машины вместе с индуктивностью L замыкается накоротко. При этом увеличивается ток ia и накапливается электромагнитная энергия в индуктивностях (L + La), а возникающая ЭДС самоиндукции eL уравновешивает ЭДС машины Е (рис. 7.34, б). При запирании прерывателя ИП ток ia под действием ЭДС самоиндукции проходит через диод Д и накопленная энергия отдается в сеть. Среднее значение тока, отдаваемого в сеть, определяется разностью между средней ЭДС якоря Е и напряжением сети U.
Из закона сохранения энергии IacpE=IccvU следует
Следовательно, при уменьшении частоты вращения якоря ток h rp, отдаваемый в сеть, уменьшается, хотя может оставаться по-
стоянным ток якоря, а следовательно, и тормозящий электромагнитный момент.
По мере снижения частоты вращения п и ЭДС Е для поддержания требуемого значения тока 1а гР увеличивают частоту тока при частотно-импульсном регулировании или длительность импульса т. при широтно-импульсном. При малой частоте вращения, когда а растет до единицы, якорь машины остается все время замкнутым накоротко и отдача энергии в сеть прекращается. Однако ток 1а ср проходит через якорь и режим торможения осуществляется практически до полной остановки.
Частота вращения /гкр, при которой прекращается рекуперативное торможение,
Рис. 7.34. Схема рекуперативного торможения двигателя постоянного тока при импульсном регулировании
где /?Ип — сопротивление элементов импульсного прерывателя (тиристоров и индуктивности L), по которым замыкается ток 1а-
Динамическое торможение осуществляется аналогично, однако в схеме (рис. 7 34, а) вместо сети и фильтра Z-фСф включается реостат, в котором гасится энергия, отдаваемая машиной.
Импульсное регулирование широко применяется при питании двигателей от сети постоянного тока, а также в автономных устройствах, где необходимо использовать аккумуляторы электрической энергии.
В схеме «управляемый выпрямитель — двигатель» и при импульсном регулировании в цепи якоря находится быстродействующий регулятор напряжения, благодаря чему могут быть существенно улучшены переходные процессы в двигателе, возникающие при резких колебаниях нагрузки, напряжения питающей сети и по другим причинам.
Содержание
Предыдущий § Следующий
| 