|
Содержание
Предыдущий § Следующий
7.3. Пуск в ход и регулирование скорости
При пуске в ход двигателя-
1) пусковой момент двигателя должен быть достаточным;
2) ток не должен быть чрезмерным,
3) операции пуска должны быть возможно более простыми.
Кроме того, часто предъявляются и другие требования, обусловленные спецификой электропривода, например: плавность пуска (для транспорта), наличие дистанционного управления, простота автоматизации, высокий КПД двигателя при пуске и т д.
Из основного уравнения для цепи якоря двигателя
Поэтому при прямом пуске, который начинается при л=0, следует опасаться большого броска тока In—U/2R, так как сумма сопротивлений в цепи якоря невелика
Более распространены способы пуска в ход, при которых пусковой ток ограничивается либо введением реостата Ra в цепь якоря, либо уменьшением питающего напряжения
Последние два способа, как это видно из уравнения
могут применяться и для регулирования частоты вращения двигателя, если реостат выбран достаточно мощным. Поэтому при использовании этих способов пуск в ход и регулирование скорости рассматриваются совместно.
Прямой пуск. Обычно в двигателях постоянного тока падение напряжения /H0M2i? во внутреннем сопротивлении цепи якоря составляет 5... 10% от £/ном, поэтому при прямом пуске ток якоря /„= = £Люм/2#= (10... 20)/дом, что создает опасность поломки вала машины и вызывает сильное искрение под щетками. По этой причине прямой пуск применяют в основном для двигателей малой мощности (до нескольких сотен ватт), в которых 2/? относительно велико, и лишь в отдельных случаях — для двигателей с последовательным возбуждением мощностью в несколько киловатт. При прямом пуске таких двигателей /„= (4 ... 6) /H0M.
Переходный процесс изменения частоты вращения п и тока якоря ia в процессе пуска определяется нагрузкой двигателя и его электромеханической постоянной времени Тм- Характер изменения п и ia при пуске двигателя с параллельным возбуждением определяется из уравнений:
 где 1пач=и/1>Я — начальный пусковой ток.
На рис. 7.9 приведены зависимости изменения тока якоря и частоты вращения (в относительных единицах) при прямом пуске двигателя с параллельным возбуждением. За время переходного про-
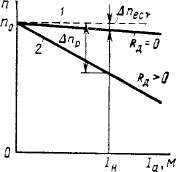 Рис. 7.9. Диаграмма изменения тока и частоты вращения двигателя с параллельным возбуждением при прямом пуске
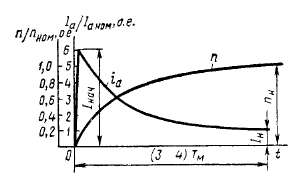
Рис. 7.10. Скоростные характеристики двигателя с параллельным возбуждением при наличии реостата в цепи якоря
цесса при пуске (3...4)ГМ частота вращения п достигает (0,95... 0,98) от установившегося значения пн, ток якоря /„ также приближается к установившемуся значению.
Включение реостата в цепь якоря. При включении реостата в цепь якоря частота вращения с ростом нагрузки уменьшается боле резко, чем при работе двигателя без реостата:
Это наглядно показано на рис. 7.10, где приведены характеристики двигателя с параллельным возбуждением: 1 — естественная (при RA—0); 2 — реостатная (при #д>0). Частоты вращения при холостом ходе для обеих характеристик равны, в то время как значения уменьшения частоты вращения Ал при нагрузке различны. При одном и том же токе якоря
Чем больше добавочное сопротивление Яд, тем быстрее падает частота вращения при увеличении нагрузки.
Механические характеристики n—f(M) двигателя с параллельным возбуждением могут быть получены из скоростных характери-
стик n=f(Ia) изменением масштаба по оси абсцисс, так как для двигателя этого типа
т. е. момент пропорционален току якоря.
Способ регулирования скорости с помощью реостата, включенного в цепь якоря, требует сравнительно простого оборудования и поэтому часто применяется при пуске двигателя.
Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением. В начальный момент пуска при я=0
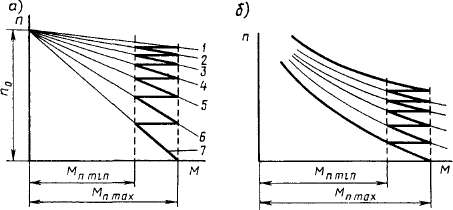 Рис. 7.11. Диаграмма изменения тока при реостатном пуске двигателей с параллельным (а) и последовательным (б) возбуждением
ток /п =U/(I,R + Rn) и максимальное сопротивление пускового реостата Rn подбирается так, чтобы пусковой ток для машин большой и средней мощности составлял /п = (1,4...1,8)/„ом, а для машин малой мощности /п = (2,0... 2,5)/ном- При этом двигатель развивает максимальный пусковой момент, а механическая характеристика имеет наибольший наклон (рис. 7.11, а).
Сопротивление регулировочного реостата RperB при пуске делается минимальным, чтобы ток возбуждения /в и поток двигателя были максимальными.
По мере разгона момент двигателя уменьшается, так как с увеличением частоты вращения растет ЭДС Е и уменьшается ток двигателя /„=(£/—E)/(T,R + R ). При достижении некоторого значения М min сопротивление пускового реостата уменьшается, вследствие чего момент снова возрастает до М тах. При этом двигатель переходит на работу по реостатной характеристике 6 и разгоняется до достижения М mln. Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатных характеристик 7, 6, 5, 4, 3 и 2 (жирные линии на рис. 7.11, а) до выхода на естественную характеристику /. Средний вращающий момент при пуске Мп. ср=

= 0,5(Afnmax + Af nmin), вследствие чего двигатель разгоняется с некоторым постоянным ускорением Таким же образом пускается в ■*оц двигатель с последовательным возбуждением (рис 7 11, б) Число ступеней пускового реостата зависит от жесткости естественной характеристики и требований, предъявляемых к плавности пуска (допустимой разности (Ainmax—Mnmin)
Операции пуска в ход могут быть автоматизированы (для двигателей большой мощности) Тогда вывод ступеней реостата производится под контролем токового реле уменьшение сопротивления производится в тот момент, когда ток двигателя уменьшается до значения, соответствующего минимальному моменту Мптт
Если пуск производится вручную, то ступени реостата выводят, ориентируясь на показания амперметра, включенного в цепь якоря, и стараются поддерживать средний ток при пуске примерно постоянным Конечно, это возможно, если двигатель нагружен и момент инерции на его валу большой Если производится пуск ненагружен-ного двигателя, то уже на первой ступени, т е при максимальном пусковом сопротивлении, он достигает скорости, близкой к режиму холостого хода, и дальнейшее выведение ступеней реостата мало влияет на ток двигателя
Основным недостатком данного способа регулирования является возникновение больших потерь энергии в реостате, особенно при низких частотах вращения Последнее видно из соотношения
т е потери линейно возрастают с уменьшением частоты вращения якоря
Данный способ позволяет только уменьшать частоту вращения по сравнению с частотой при естественной характеристике Иногда важно то, что при включении в цепь якоря значительного сопротивления характеристики двигателя становятся крутопадающими (мягкими), вследствие чего небольшие изменения нагрузочного момента приводят к большим изменениям частоты вращения
Изменение напряжения на зажимах якоря. При различных напряжениях 1)\ и U2 на зажимах якоря частоты вращения определяются соответственно формулами
В двигателе с параллельным возбуждением частота вращения холостого хода изменяется пропорционально изменению напряжения:
а изменение частоты вращения при одинаковой нагрузке остается тем же:
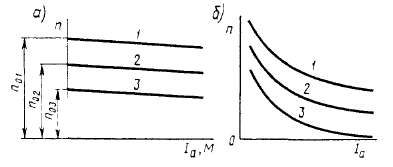
Рис. 7.12. Скоростные характеристики двигателей с параллельным (а) и последовательным (б) возбуждением при различных напряжениях на якоре
В связи с этим скоростные характеристики n=f(Ia) двигателя с параллельным возбуждением представляют собой семейство параллельных прямых 1, 2 к 3 (рис. 7.12, а).
Механические характеристики n=f(M) получаются из скоростных простым изменением масштаба по оси абсцисс, так как момент пропорционален току якоря.
Скоростные и механические характеристики двигателя с последовательным возбуждением строятся в основном аналогично (рис. 7.12,6).
Регулирование частоты вращения двигателя путем изменения напряжения на зажимах якоря обычно ведут «вниз», т. е. уменьшают напряжение и частоту вращения по сравнению с номинальными. Данный способ позволяет произвести безреостатный пуск двигателя, что в некоторых случаях дает ощутимую экономию электроэнергии из-за ликвидации потерь в пусковых сопротивлениях.
Однако требуется устройство для регулирования напряжения на якоре, которое получается довольно сложным и дорогим. Поэтому пуск двигателя при пониженном напряжении производится только в тех случаях, когда требуется часто производить пуск, либо когда источник переменного напряжения необходим для регулирования скорости двигателя.
Изменение магнитного потока двигателя. Чтобы изменить магнитный поток, необходимо регулировать ток возбуждения двигате-
ля. При различных магнитных потоках Ф\ и Ф2 частоты вращения
В двигателе с параллельным возбуждением, например, частота вращения при холостом ходе изменяется обратно пропорционально магнитному потоку:
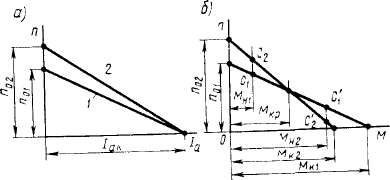 Рис. 7.13. Скоростные (а) и механические (75) характеристики двигателя с параллельным возбуждением при разных значениях магнитного потока
т. е. при уменьшении магнитного потока частота п0 возрастает. Так же возрастает падение частоты вращения Дга
вследствие чего скоростные характеристики двигателя при различных магнитных потоках не параллельны (рис. 7.13, а). Эти характеристики пересекаются при частоте вращения, равной нулю, так как в данном случае £=сеФ/г=0 и ток не зависит от потока:
Ia,=Ul^R, (7.39)
где ток /а к при п=0 — ток короткого замыкания.
Механические характеристики для двигателя с параллельным возбуждением строятся на основании следующих соображений. Каждая из механических характеристик практически линейна (если пренебречь реакцией якоря) и может быть построена по двум точкам: точке холостого хода, в которой момент равен нулю, и точке короткого замыкания, в которой момент максимален.
Сравнивая моменты в режиме короткого замыкания при различных значениях магнитного потока, получим
   
Таким образом при уменьшении магнитного потока частота вращения холостого хода возрастает, а момент при коротком замыкании снижается. Следовательно, механические характеристики, построенные при различных значениях магнитного потока, пересекаются при частоте вращения, меньшей частоты вращения при холостом ходе, но большей нуля, при моменте Мкр (рис. 7.13, б). Рас-
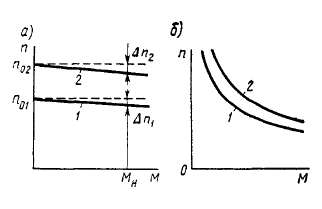
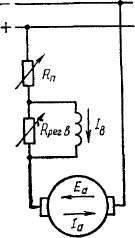 Рис. 7.14. Механические характеристики двигателей большой и средней мощности с параллельным (а) и последовательным (б) возбуждением:
/ — при нормальном возбуждении, 2 — при ослабленном магнитном поле
Рис. 7.15. Включение регулировочного реостата в двигателе с последовательным возбуждением
сматривая механические характеристики, можно сделать вывод, что при нагрузочном моменте Мн\, существенно меньшем Мкр, снижение потока ведет к увеличению частота вращения (точки Cj и С2). Это характерно для двигателей средней и большой мощностей (рис. 7.14, а), где в рабочем диапазоне изменения токов падения напряжения в якоре невелики (их уменьшают для повышения КПД).
В микромашинах уменьшение потока и тока возбуждения обычно применяется для снижения частоты вращения: если MH2>AfKp, то частота вращения при снижении потока уменьшается (точки СУ и Сг').
Скоростные и механические характеристики двигателя с последовательным возбуждением при уменьшении магнитного потока строятся аналогично, поэтому в двигателях большой и средней мощностей при уменьшении магнитного потока частота вращения возрастает (рис. 7.14, б). Магнитный поток в этом двигателе обычно уменьшается путем включения регулировочного реостата /?регв параллельно обмотке возбуждения (рис. 7.15), вследствие чего ток возбуждения
где /<Рег.в — сопротивление регулировочного реостата, включенного параллельно обмотке возбуждения; f$ = /B/Ai — коэффициент регулирования возбуждения.
Рассмотренный способ регулирования частоты вращения прост и экономичен, поэтому широко применяется на практике, однако он применим в сравнительно небольшом диапазоне; обычно Ятах/Ят1п= — 2...3. Нижний предел nmin ограничивается насыщением магнитной цепи машины, которое не позволяет сильно увеличивать магнитный поток. Верхний предел лтах определяется условиями устойчивости (при сильном уменьшении /в двигатель «идет вразнос»), а также тем, что при глубоком ослаблении возбуждения резко увеличивается искажающее действие реакции якоря и растет реактивная ЭДС, что повышает опасность возникновения искрения на коллекторе и появления кругового огня.
Содержание
Предыдущий § Следующий
| 