|
Содержание
Предыдущий § Следующий
Раздел 9 АСИНХРОННЫЕ МАШИНЫ
В настоящий раздел вошли технические данные асинхронных двигателей основного исполнения и модификаций серий общего назначения. Технические данные асинхронных двигателей специального назначения (крановых, металлургических, экскаваторных и др.), в том числе разработанных на базе серий общего назначения, приведены в т. 2 Справочника.
9.1. Общие сведения
9.1.1. Асинхронные машины как преобразователи энергии
Преобразование энергии в асинхронных машинах происходит при несинхронном (асинхронном) вращении ротора и магнитного поля. Разность частот вращения ротора пр и поля статора пс определяет частоту и амплитуду ЭДС, наводимой в проводниках обмотки ротора. В рабочих режимах машины разница в частотах вращения ротора и поля статора обычно составляет лишь несколько процентов. Поэтому при анализе и характеристике работы машины частоту вращения ротора оценивают не в абсолютных единицах (об/мин, рад/с), а в относительных, вводя понятие скольжения s (см. § 1.1). Скольжение выражается либо в процентах (s = 1 %, 2,5 % и т. д.), либо в долях единицы (s = 0,01; 0,025 и т. д. [12]).
Теоретически асинхронная машина мо-
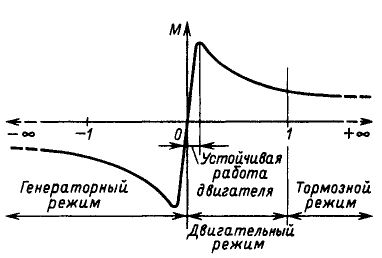
Рис. 9.1. Механическая характеристика асинхронной машины
жет работать во всем диапазоне изменений s от -оо до 0 (генераторный режим) и от 0 до оо (рис. 9.1), но не при s = 0. Режим работы с положительным скольжением подразделяется на двигательный (s = 0 -г- 1) и тормозной, соответствующий изменению скольжения от 1 до оо. В тормозном режиме ротор вращается против направления вращения /
момент, обратный моменту, приложенному к валу.
9.1.2. Конструкция и основные эксплуатационные характеристики
По конструктивному исполнению и способам монтажа двигатели выполняют в соответствии с ГОСТ 2479-79. Наибольшее распространение получили исполнения IM1—IM4. Среди машин малой мощности распространены также исполнения IM5 и IM9, которые часто применяют в различных бытовых устройствах и в электрифицированном инструменте. По степени защиты от воздействия окружающей среды для машин малой мощности более распространены асинхронные двигатели исполнения IP44 и IP54 со способом охлаждения IC041, а для машин средней и большой мощностей — также исполнения IP23 со способом охлаждения IC01.
Статоры машины шихтуют из электротехнической стали толщиной 0,35 — 0,5 мм. При длине магнитопровода меньше 250 — 300 мм радиальные каналы в статорах отсутствуют. При большей длине магнитопро-вод подразделяют радиальными каналами, служащими для прохода охлаждающего воздуха. Обмотка статора во всех машинах общего назначения до напряжения 660 В мощностью до 100 кВт — из круглого провода, всыпная, а при мощности более 100 кВт - из подразделенных катушек из прямоугольного провода. В машинах на номинальное напряжение 3 кВ и выше обмотка выполняется только цельными катушками, намотанными прямоугольным проводом. Конструкция кре-
пления магнитопровода стаюра в корпусе зависит от габаритов и мощности машины. В машинах малой мощности корпуса выполнены из алюминия, в некоторых конструкциях - заливкой алюминия на собранный магнитопровод статора. В более мощных машинах корпуса и подшипниковые щиты чугунные или стальные. В машинах больших габаритов корпуса сварные из листовой стали.
Вентиляторы в большинстве машин установлены непосредственно на валу, в машинах исполнения IP23 — внутри корпуса, в машинах исполнения IP44 — вне корпуса, под кожухом. В машинах с коротко-замкнутыми роторами функцию вентиляторов выполняют вентиляционные лопатки на замыкающих кольцах обмотки ротора.
Сердечники роторов двигателей с высотой оси вращения до 450 мм насаживают непосредственно на вал, причем до высоты h = 225 -т- 250 мм - на гладкий вал. В более крупных машинах сердечники крепят на валу шпонкой. Сердечники роторов машин больших габаритов насаживают на втулку или на остов ротора.
В подавляющем большинстве случаев асинхронные машины используют как двигатели, т. е. они работают в диапазоне скольжений от s = 1 (начальный момент пуска — ротор неподвижный) до значений, близких к нулю (в режиме холостого хода ^х^О).
Для оценки и сравнения пусковых свойств асинхронных двигателей (АД) моменты, развиваемые АД при пуске и разгоне, принято выражать не в абсолютных, а в относительных единицах, т. е. указывать кратность момента по отношению к номинальному (М* = М/Мном).
Кривая M*=f(s) имеет несколько характерных точек, соответствующих пусковому Muir, минимальному М„,„», максимальному Mmaxif и номинальному моментам (Мном* = 1) (рис. 9.2).
Пусковой момент характеризует начальный момент, развиваемый АД непосредственно после включения в сеть при неподвижном роторе (s = 1). В начале разгона АД его момент несколько уменьшается по сравнению с пусковым. Обычно Мтщ на 10 — 15 % меньше Мп. У большинства АД Мп» > 1, однако АД могут быть пущены под нагрузкой только при условии, что момент сопротивления на валу будет меньше, чем Мт;„», иначе АД не разгонится и будет работать с большим скольжением (участок кривой от Mmln<c до Мп«). Такой режим опасен для АД, так как сопровождается большими токами обмоток.
Рис. 9.2. Зависимость тока и момента асинхронного двигателя от скольжения
Максимальный момент характеризует наибольший момент АД — его перегрузочную способность. Часто Мтах„ называют также критическим моментом, а скольжение, при котором момент достигает максимума,— критическим скольжением (sKp). В АД общего назначения sKp обычно не выходит за пределы 0,07 — 0,12. Если момент сопротивления при работе АД превышает Af,^*, АД останавливается.
Номинальный момент Мном — это момент на валу АД, работающего при номинальном напряжении с номинальной нагрузкой при номинальном скольжении.
Режим, при котором обмотка статора подключена к сети, а ротор неподвижен (заторможен), называют коротким замыканием АД. При s = 1 ток АД в несколько раз превышает номинальный (рис. 9.2), поэтому в режиме короткого замыкания АД, не рассчитанный на работу при s a 1, может находиться лишь в течение нескольких секунд. Режим короткого замыкания возникает при каждом пуске АД из неподвижного состояния, однако в этих случаях он кратко-времен и обмотка не успевает нагреться выше допустимого уровня. Несколько пусков АД подряд через короткие промежутки времени могут повлечь за собой повышение температуры его обмоток выше допустимой, если АД не рассчитаны на такой режим работы.
Асинхронные машины, предназначенные для работы с большими скольжениями, с s = 1 (в трансформаторном режиме) или с s > 1 (в тормозном режиме), специально рассчитывают с учетом повышенных токов в обмотках.
Рабочие характеристики АД (рис. 9.3) показывают, что наибольший КПД достигает-
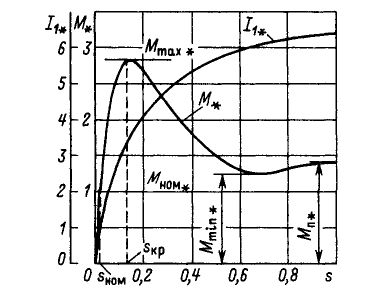
Рис. 9.3. Рабочие характеристики асинхронного двигателя
ся при нагрузке на: 10—15% меньшей номинальной. Двигатели рассчитываются так потому, что большинство из них в силу стандартной дискретной шкалы мощностей работают с некоторой недогрузкой.
При эксплуатации АД с нагрузкой, существенно меньшей номинальной, уменьшаются и их КПД, и коэффициент мощности.
Асинхронные двигатели в силу ряда достоинств (относительная дешевизна, высокие энергетические показатели, простота обслуживания) являются наиболее распространенными среди всех электрических машин. В количественном отношении они составляют около 90% всего парка машин в народном хозяйстве, а по установленной мощности - около 55 %. Асинхронные двигатели выпускают, как правило, большими сериями, наиболее значительными из которых яв-
ляются машины общего назначения — серии 4А, АИ и серии специализированных двигателей, например крановых МТ, взрыво-защищенных ВР и др. Двигатели малой мощности для бытовой техники выпускают в количестве нескольких десятков миллионов штук в год.
9.1.3. Особенности
асинхронных двигателей с фазными
и короткозамкнутыми роторами
По конструкции АД делят на два типа: АД с фазным ротором (рис. 9.4) и АД с ко-роткозамкнутым ротором (рис. 9.5). Конструкции статоров, корпусов, подшипниковых щитов и общая компоновка машин обоих типов не имеют существенных различий.
В пазах фазных роторов размещена изолированная обмотка, имеющая столько же фаз, сколько и обмотка статора. Обмотка ротора в большинстве случаев жестко соединена в звезду и реже - в треугольник и имеет только три вывода, которые подсоединены к контактным кольцам, расположенным внутри корпуса или на выступающем конце вала. Токоподводы от обмотки к контактным кольцам, расположенным вне корпуса, проходят по внутреннему отверстию вала. Прилегающие к контактным кольцам щетки соединены с пусковым реостатом, позволяющим изменять сопротивление роторной цепи.
В начальный момент пуска АД между кольцами включают наибольшее сопротив-
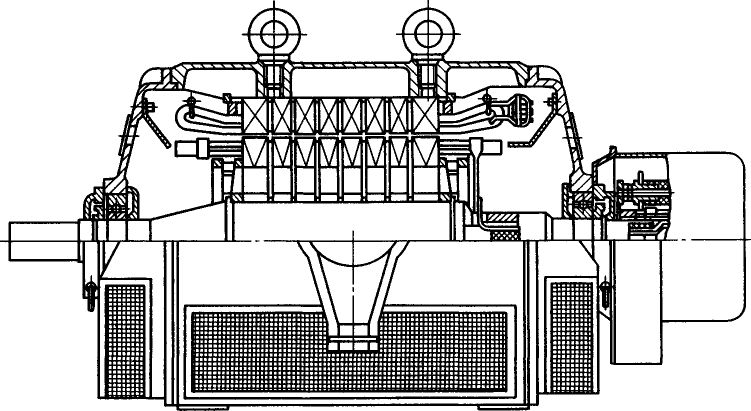 Рис. 9.4. Асинхронный двигатель с фазным ротором
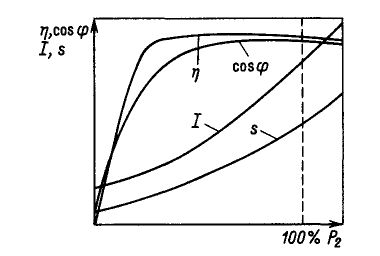
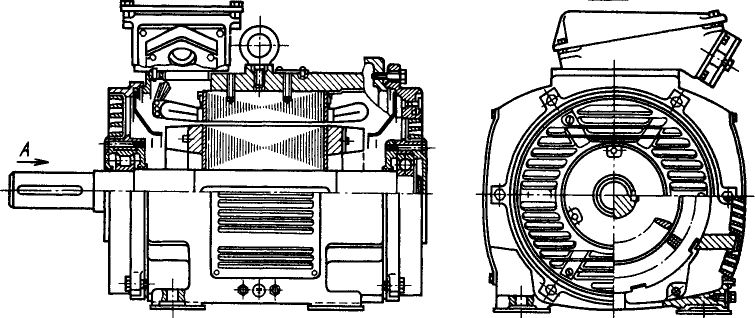 Рис. 9.5. Асинхронный двигатель с короткозамкнутым ротором
ление, что позволяет получить большой пусковой момент и ограничить пусковой ток двигателя. По мере разгона отключают поочередно группы резисторов таким образом, что весь период разгона АД проходит при моменте и токе, изменяющихся в определенных пределах (рис. 9.6).
Изменение сопротивления цепи фазного ротора путем введения добавочных резисторов используют также для плавного, без больших ускорений пуска двигателя и для регулирования частоты вращения. Однако этот метод регулирования снижает КПД двигателя из-за больших электрических потерь в резисторах. При этом по резисторам длительно протекает полный ток ротора, по-
этому регулировочный реостат имеет большие размеры, чем пусковой.
Электродвигатели с фазными роторами находят применение в приводах с тяжелыми условиями пуска, требующих плавного пуска и разгона, и в приводах с регулированием частоты вращения, например в приводах подъемных кранов.
Обмотки короткозамкнутых роторов АД машин не имеют корпусной изоляции. В АД общего назначения мощностью до 300-400 кВт обмотку короткозамкнутых роторов выполняют заливкой пазов алюминием или его сплавами, причем одновременно отливают и стержни обмотки, и замыкающие кольца с вентиляционными лопатками.
Рис. 9.6. Изменение тока и момента при реостатном пуске асинхронного двигателя с фазным ротором:
1-3 - характеристики при различных ступенях пускового реостата с последовательно убывающими значениями сопротивлений; 4 — естественные характеристики; Л/наиб, Л/Наим — наибольший и наименьший моменты, развиваемые двигателем в процессе реостатного пуска; /2Наиб> ^2наим — наибольший и наименьший токи ротора во время разгона двигателя
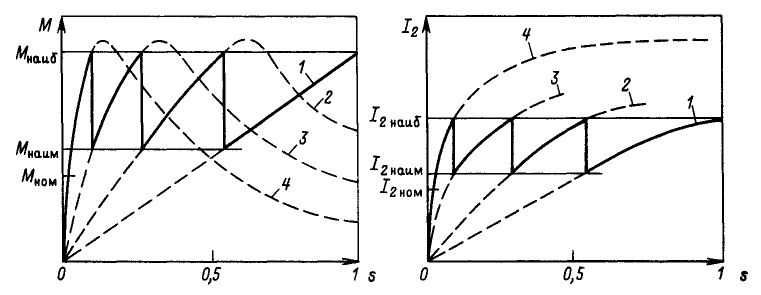
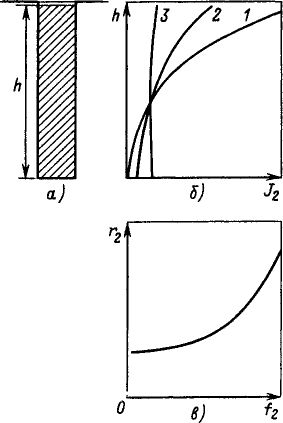 Рис. 9.7. Влияние эффекта вытеснения тока
на активное сопротивление короткозамкну-
той обмотки ротора:
а — стержень обмотки в пазу ротора; б — распределение плотности тока по сечению стержня при разных частотах (/ — при пуске двигателя, s — 1, f2=f[', 2 — ъ процессе разгона двигателя, 1 > .?> sH0M; ./гном <f2<f\'< 3 — при номинальном режиме, s = sHOM, /2ном =f\sHOMV, « - изменение сопротивления обмотки в зависимости от частоты тока в роторе
Изготовление короткозамкнутых роторов значительно проще и дешевле, чем фазных, а отсутствие контактных колец, скользящих контактов и пусковых реостатов уменьшает общие габариты машины, повышает ее надежность и упрощает эксплуатацию. Поэтому подавляющее большинство современных АД мощностью до нескольких сотен киловатт выполняют с короткозамк-нутыми роторами.
Для повышения пусковых моментов АД с короткозамкнутыми роторами используют эффект вытеснения тока. Он заключается в неравномерном распределении тока по поперечному сечению стержней обмотки ротора: плотность тока уменьшается в нижней, ближайшей к дну паза части каждого стержня и увеличивается в верхней части, обращенной к воздушному зазору. Вызванное этим увеличение электрических потерь в стержнях эквивалентно увеличению активного сопротивления обмотки ротора по сравнению с ее сопротивлением постоянному току.
Эффект вытеснения тока возрастает с увеличением частоты тока в роторе (рис. 9.7) и в двигательном режиме асинхронных машин становится наибольшим в начальный момент пуска при s = 1, когда /2 = = /t. Это вызывает увеличение пускового момента. Во время разгона АД частота тока ротора уменьшается (/2 = sfj и, следовательно, уменьшается эквивалентное сопротивление обмотки ротора. В номинальном режиме при малых скольжениях эффект вытеснения тока практически не проявляется и ток распределяется равномерно по всему сечению стержней обмотки ротора.
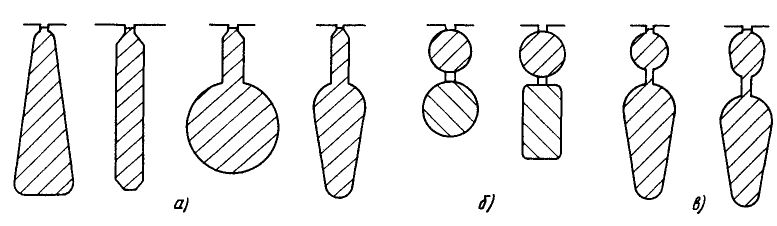
Сопротивление обмотки ротора под действием эффекта вытеснения тока возрастает в большей степени в высоких стержнях и в стержнях с уменьшенной площадью поперечного сечения их верхней части по сравнению с нижней. Поэтому в роторах АД, предназначенных для работы с тяжелыми условиями пуска, делают глубокие прямоугольные пазы либо стержни обмотки выполняют фигурными (рис. 9.8).
Такой же, а в ряде случаев и больший эффект достигают в роторах с двойной беличьей клеткой, когда в пазах располагают друг над другом по два стержня, образующих две обмотки. В пусковых режимах при
Рис. 9.8. Конфигурация стержней короткозамкнутых роторов асинхронных двигателей с повышенными пусковыми характеристиками:
а — фигурные стержни; 6 — вставные стержни двухклеточных роторов; в — стержни литой обмотки
двухклеточных роторов
большой частоте тока ротора весь ток практически сосредоточивается только в верхних стержнях, имеющих большое сопротивление. При малых скольжениях его частота уменьшается и ток ротора распределяется равномерно по пусковой и рабочей обмоткам в соответствии с их активными сопротивлениями.
Обмотку короткозамкнутых роторов с фигурными стержнями выполняют в основном заливкой пазов алюминием, что позволяет выбрать конфигурацию пазов и стержней с оптимальными размерными соотношениями для достижения требуемого действия эффекта вытеснения тока. Лишь некоторые АД большой мощности выполняют с медными фигурными стержнями.
Обмотки роторов с двойными клетками делают как литыми, так и из вставных стержней (рис. 9.8). В литых обмотках обе (рабочую и пусковую) обмотки выполняют из одинакового материала. Они имеют общие замыкающие кольца. В роторах со вставными стержнями рабочую обмотку изготовляют из медных стержней, а пусковую — из стержней с меньшей удельной электрической проводимостью, в большинстве машин — из латунных. Замыкающие кольца каждой из обмоток раздельные, из того же материала, что и стержни. При одном и том же активном сопротивлении латунные стержни имеют большую площадь поперечного сечения, чем медные, и большую теплоемкость, что снижает индуктивное сопротивление рассеяния обмотки ротора и уменьшает нагрев стержней пусковой обмотки во время пуска.
9.1.4. Регулирование частоты вращения асинхронных двигателей
Одним из недостатков АД является неэкономичное регулирование частоты вращения. Частота вращения АД np = nc (I - s) =
=---(1 — s) при постоянном моменте со-
Р
противления зависит от скольжения и частоты вращения поля.
Изменение скольжения может быть достигнуто либо увеличением сопротивления цепи ротора, либо изменением потока. Первый способ применим лишь для АД с фазным ротором. Он дает возможность регулировать частоту вращения в широком диапазоне (практически от s = 1 до s = sHOM), но не экономичен, так как в дополнительно введенных в цепь обмотки ротора резисторах возникают большие потери от полного тока ротора.
Изменение потока машины осуществимо, например, путем изменения питающего напряжения, но возможно лишь в сторону его уменьшения. Скольжение АД при этом возрастает, но одновременно пропорционально квадрату напряжения уменьшается его перегрузочная способность, поэтому возможный диапазон регулирования частоты вращения АД невелик. По экономичности метод регулирования потоком примерно равноценен регулированию введением добавочного сопротивления в цепь ротора, так как с уменьшением потока возрастают токи статора и ротора и соответственно увеличиваются электрические потери при незначительном снижении потерь в стали.
Изменение частоты вращения поля пс достигается либо регулированием частоты тока питания, либо изменением числа полюсов обмотки статора. Регулирование изменением частоты тока питания в последние годы получает все большее распространение в связи с развитием и совершенствованием тиристорных преобразователей. Основным недостатком данного метода наряду с высокой стоимостью самого преобразователя, некоторым снижением надежности работы всей установки и увеличением ее габаритов является несинусоидальность тока на выходе преобразователя, отражающаяся на технических показателях АД.
Регулирование частоты вращения путем изменения числа полюсов статора широко распространено во многих приводных установках. Обмотки АД с переключением числа пар полюсов дают возможность ступенчатого (две, три или четыре ступени) регулирования частоты вращения. Многоскоростные АД применяются во многих промышленных приводах и выпускаются электромашиностроительными заводами как модификации основных серий машин общего назначения. Основным недостатком данного метода является невозможность плавного регулирования и меньшее, чем в обычных АД, использование активного объема машины: габаритные размеры многоскоростных АД всегда больше, чем односкоростных тех же мощности и частоты вращения.
В некоторых установках применяют способ регулирования частоты вращения введением добавочной ЭДС в цепь фазного ротора.
Источником добавочной ЭДС, частота которой должна быть равна частоте тока ротора (/2 = s/j), может служить электромашинный или тиристорный преобразователь, частота на выходе которого определяется частотой вращения регулируемой машины.
Другие возможные методы регулирования частоты вращения АД не получили распространения.
9.1.5. Специальные режимы асинхронных машин
В ряде специальных установок асинхронные машины с фазными роторами используются в качестве преобразователей частоты, для изменения фазы (фазовращатели) и для изменения напряжения (индукционные регуляторы).
В преобразователях частоты напряжение снимается с контактных колец фазного ротора, вращающегося от приводного двигателя. Статор машины подключается к сети с частотой f у Переменная частота тока ротора определяется соотношением частоты вращения поля статора и частоты вращения приводного двигателя:
jl~u~~^~~ 60 •
Регулирование частоты /2 достигается изменением частоты вращения ротора приводного двигателя пр.
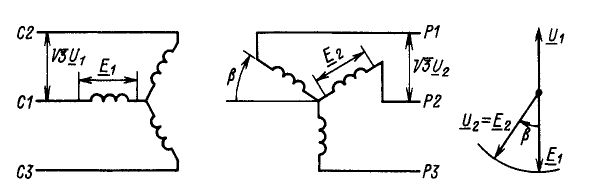
Для изменения фазы напряжения используют заторможенную асинхронную машину. Напряжение снимают с контактных колец ротора, при этом фаза напряжения определяется взаимным положением осей
обмоток ротора и статора (рис. 9.9). Для изменения положения ротора относительно статора и фиксации его в нужном положении используют червячную передачу с ручным или электрическим приводом от вспомогательного двигателя.
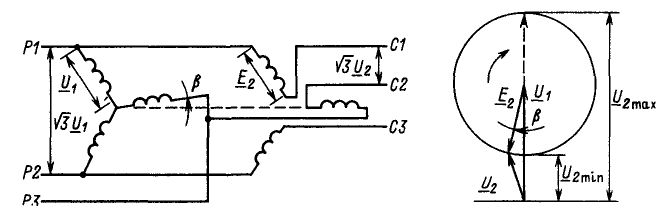
Для плавного изменения напряжения используют асинхронную машину, работающую в трансформаторном режиме (индукционный регулятор). К сети подключают обмотку заторможенного фазного ротора. Последовательно с каждой ее фазой по автотрансформаторной схеме (рис. 9.10) соединяют фазы обмотки статора, играющие роль вторичной обмотки автотрансформатора. При повороте ротора относительно статора из-за изменения взаимного положения их обмоток напряжение регулятора меняется:
U= U1 ±Е2,
где Ui и Е2 — напряжение и ЭДС соответственно обмоток ротора и статора (см. рис. 9.10).
Поворот и фиксирование положения ротора относительно статора осуществляется так же, как и в фазорегуляторе, т. е. с помощью червячной передачи с ручным или электрическим приводом от вспомогательного электродвигателя. Индукционные регуляторы применяются в промышленных установках для плавного регулирования напряжения.
Рис. 9.9. Схема включения обмоток и векторная диаграмма напряжений фазовращателя
Рис. 9.10. Схема соединения обмоток и векторная диаграмма напряжений трехфазного
индукционного регулятора
Содержание
Предыдущий § Следующий
| 