Введение
В.1 Общие сведения
В локальных системах автоматического управления (САУ), электроприводах
промышленных роботов и технологического оборудования гибких автоматизированных
производств (ГАП) широко применяются коллекторные и бесколлекторные двигатели
постоянного тока, синхронные и асинхронные переменного тока, шаговые двигатели.
При выборе необходимо учитывать следующие основные факторы:
1)
функциональное назначение (исполнительный в системе автоматического управления,
силовой приводной, приводной в программно-временном устройстве и т.д.);
2)
тип, возможности и ограничения источника питания двигателя и усилителя
мощности;
3)
тип системы управления и требования к ее статическим и динамическим
характеристикам (цифровые системы
управления, аналоговые, комбинированные и т.д.);
4)
конструкцию, характер нагрузок и движений объекта управления, с которым
соединен двигатель;
5)
условия работы (степень агрессивности среды, ее давление, температуру,
влажность, вибрации, инерционные нагрузки), время работы двигателя и требуемый
ресурс безотказной работы в заданных условиях;
6)
ориентировочное значение предполагаемой выходной мощности и требуемый к.п.д. ,
необходимую мощность управления;
7)
условия эксплуатации (возможность
контроля, возможность восстановления при отказе, время приведения в
готовность);
8)
стоимость и эксплуатационные расходы.
В.2 Объект проектирования
В
настоящей курсовой работе осуществляется один из этапов проектирования
локальных САУ и электроприводов ГАП, связанный с выбором электрических
двигателей. Необходимо выбрать электрические двигатели для электроприводов
кинематических звеньев промышленного робота, входящего в модуль ГАП; для
привода координатного стола, перемещающего обрабатываемые изделия; для силового
программно-временного привода силовой части оборудования модуля ГАП и для
приборной следящей системы, входящей в
комплект измерительной аппаратуры модуля ГАП.
Исходя
из оценки факторов, приведенных в п. В.1, рекомендуется выбирать следующие типы
двигателей:
а)
для силового программно-временного привода — трехфазный асинхронный двигатель;
б)
для приборной следящей системы — исполнительный двухфазный асинхронный микродвигатель;
в)
для привода координатного стола — синхронный шаговый двигатель;
г)
для привода кинематического звена промышленного робота — исполнительный двигатель постоянного тока.
В.3 Техническое задание на выбор электрических двигателей
В.3.1 Техническое задание на трехфазный асинхронный двигатель силового привода
Режим работы двигателя: повторно-кратковременный.
Нагрузочная диаграмма двигателя в виде графика зависимости мощности нагрузки Р от времени t
(рис. В.1). Мощность Р задана с учетом потерь мощности в механическом передаточном устройстве.
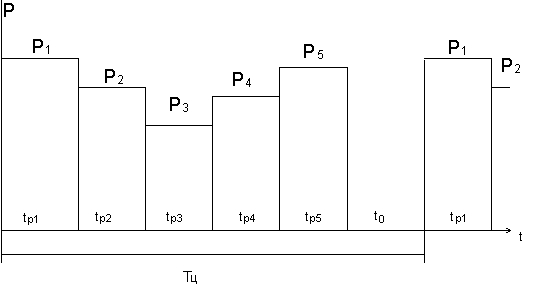
рис. В.1
На этом рисунке:
tp — время работы
t0 — время паузы
Tц — время цикла.
Uном — номинальное напряжение питания.
n1 — синхронная частота вращения.
Список разрешенных к применению серий:
- трехфазные асинхронные двигатели с повышенным скольжением 4АС, предназначенные
для работы при различной относительной продолжительности включения.
Схема управления.
Примечание: Пример Т3 для одного из вариантов приведен в таблице 1 приложений
В.3.2 Техническое задание на исполнительный асинхронный микродвигатель приборной следящей системы
Способ управления — амплитудный или амплитудно-фазовый с конденсатором в цепи возбуждения.
Umax,, Umin — верхняя и нижняя границы номинального напряжения управления.
f — номинальная частота.
wнг.max — максимальная угловая скорость
исполнительной оси (нагрузки)
eнг.max — максимальное угловое ускорение исполнительной оси.
Мнг — максимальный
статический момент сопротивления (нагрузки) на исполнительной оси.
iред.max — максимальное значение передаточного отношения редуктора.
Список разрешенных к применению серий:
- двухфазные исполнительные асинхронные микродвигатели с полым немагнитным ротором ДИД.
Схема управления.
Примечание: Пример Т3 для одного из вариантов приведен в таблице 2 приложений.
В.3.3 Техническое задание на шаговый двигатель координатного стола.
Uном — номинальное напряжение управления.
fш.дв.min — нижняя граница приемистости при номинальной нагрузке.
Mнг — максимальный статический момент сопротивления (нагрузки) на исполнительной оси.
wнг.max — максимальная угловая скорость
исполнительной оси (нагрузки) при номинальной частоте приемистости.
Jнг — максимальный момент инерции на исполнительной оси (нагрузки).
Dqнг — максимально допустимая дискретность
отработки угла поворота исполнительной оси.
Список разрешенных к применению серий:
- активные шаговые двигатели ШДА и ДШ.
Схема управления.
Примечание: Пример Т3 для одного из вариантов приведен в таблице 3 приложений.
В.3.4 Техническое задание на исполнительный двигатель постоянного тока промышленного робота
Способ управления — якорный.
Umax , Umin — верхняя и нижняя границы номинального напряжения управления.
Dw*доп — допустимое
изменение угловой скорости при заданном изменении момента DМ*зад= 10% в номинальном режиме.
wнг.max — максимальная угловая скорость
исполнительной оси (нагрузки).
eнг.max — максимальное угловое ускорение исполнительной оси.
Мнг — максимальный статический момент сопротивления (нагрузки) на исполнительной оси.
Jнг — максимальный момент инерции на исполнительной оси (нагрузки).
iред.max — максимальное значение передаточного отношения редуктора.
Список разрешенных к применению серий:
- двигатели с постоянными магнитами ДПМ.
Примечание: Пример Т3 одного из вариантов приведен в таблице 4 приложений.
Оглавление | Вперед
| 