<< Предыдущая |
Содержание |
Следующая >>
Вращающий момент асинхронного двигателя
§ 93. ВРАЩАЮЩИЙ МОМЕНТ АСИНХРОННОГО
ДВИГАТЕЛЯ
Вращающий момент асинхронного
двигателя создается при взаимодействии вращающегося магнитного поля статора с
токами в проводниках обмотки ротора. Поэтому вращающий момент зависит как от
магнитного потока статора Фт, так и
от силы тока в обмотке ротора
I2. Однако в создании вращающего момента участвует
только активная мощность, потребляемая машиной из сети. Вследствие этого
вращающий момент зависит не от силы тока
в обмотке ротора I2, а только от
его активной составляющей,
т. е. I2
cos
ψ2,
где ψ2 — фазный угол между э. д. с. и током в обмотке
ротора.
Таким образом, вращающий
момент асинхронного двигателя определяется следующим выражением:

где С — конструктивная
постоянная машины, зависящая от числа ее полюсов и фаз, числа витков обмотки
статора, конструктивного выполнения обмотки и принятой системы единиц. При
условии постоянства приложенного
напряжения магнитный поток
остается также почти постоянным при любом изменении нагрузки двигателя.
Таким образом, в выражении вращающего момента величины
С и Фт постоянны и вращающий момент
пропорционален только активной составляющей тока в обмотке ротора, т. е. 
Изменение нагрузки или тормозного момента на валу
двигателя изменяет и скорость вращения ротора и скольжения.
Изменение скольжения вызывает изменение как силы тока
в роторе I2, так и ее активной составляющей
I2
cos
ψ2/
Можно
силу тока в роторе определить отношением э.д. с. к полному сопротивлению, т. е.

где Z2, r2 и Х2 — полное,
активное и реактивное сопротивления фазы обмотки ротора.
Изменение скольжения изменяет
частоту тока ротора. При неподвижном роторе (n2=0 и
S = 1)
вращающееся поле с одинаковой скоростью пересекает проводники обмотки статора
и ротора и частота тока в роторе равна частоте тока сети (f2=f1). При
уменьшении скольжения обмотка ротора пересекается магнитным полем с меньшей
частотой, так что частота тока в роторе уменьшается. Когда ротор вращается
синхронно с полем (n2=n1 и
S=0), проводники
обмотки ротора не пересекаются магнитным полем, так что частота тока в роторе
равна нулю f2=0. Таким образом, частота тока
в роторе пропорциональна скольжению, т. е.
f2=Sf1
Активное сопротивление
обмотки ротора почти не зависит от частоты, тогда как э.д.с и реактивное сопротивление пропорциональны
частоте, т. е. изменяются с изменением скольжения, и могут быть определены
следующими выражениями:
где Е и X — э. д. с. и
индуктивное сопротивление фазы обмотки неподвижного ротора соответственно.
Таким
образом, имеем:
и вращающий момент

Следовательно, при небольших
скольжениях (примерно до 20%), когда
SХ мало
по сравнению с r2, увеличение скольжения вызывает
увеличение вращающего момента, так как при этом воз, растает активная
составляющая тока в ротоке (I2соs
ψ2).
При больших скольжениях (SХ больше, чем
r2) увеличение скольжения будет вызывать уменьшение
вращающего момента. Таким образом, при больших скольжениях его увеличение хотя
и увеличивает силу тока в роторе
I2, но ее
активная составляющая I2 соs
ψ2
и, следовательно, вращающий
момент уменьшаются вследствие значительного увеличения реактивного соя
противления обмотки ротора.
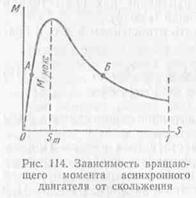
На рис.
114 показана зависимость вращающего момента
от скольжения. При некотором скольжении
Sт (примерно 20%) двигатель развивает
максимальный момент, который
определяет перегрузочную способность двигателя
и обычно в 2—3 раза превышает номинальный момент.
Устойчивая работа
двигателя возможна только на
восходящей ветви кривой зависимости
момента от скольжения, т. е. при изменении скольжения в пределах от 0 до
Sт. Работа двигателя на нисходящей ветви указанной
зависимости, т. е. при скольжении
S>Sт, невозможна, так как здесь не обеспечивается
устойчивое равновесие моментов.
Если предположить, что
вращающий момент был равен тормозному (Мвр=Мторм) в точках А и Б, то при случайном нарушении равновесия
моментов в одном случае оно восстанавливается, а в другом не восстанавливается.
Допустим, что вращающий момент двигателя почему-либо уменьшился (например, при
понижений напряжения сети), тогда скольжение начнет увеличиваться. Если
равновесие моментов было в точке А, то увеличение скольжения вызовет увеличение
вращающего момента двигателя и он станет вновь равным тормозному моменту, т. е.
равновесие моментов восстановится. Если же равновесие моментов было в точке Б,
то увеличение скольжения вызовет уменьшение вращающего момента, который будет
оставаться всегда меньше тормозного, т. е. равновесие моментов не восстановится
и скорость вращения ротора будет непрерывно уменьшаться до полной остановки
двигателя.
Если приложить к валу
двигателя тормозной момент, больший максимального момента, то равновесие
моментов не восстановится и ротор двигателя остановится.
 . .
Вращающий момент двигателя
пропорционален квадрату приложенного напряжения, так как пропорциональны
напряжению как магнитный поток, так и сила тока в роторе. Поэтому изменение
напряжения в сети вызывает значительное изменение вращающего момента.
<< Предыдущая |
Содержание |
Следующая >>
| 