|
Содержание Главная (библиотека)
Предыдущий § Следущий
§ 2.8. ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
Общие сведения. В качестве исполнительных двигателей, преобразующих в схемах автоматики электрические сигналы в заданный поворот или вращение вала, обычно используются двигатели малой мощности от долей ватта до нескольких киловатт. Наибольшее распространение получили двигатели до 100 вт. Исполнительный двигатель приходит во вращение при подаче сигнала, а при снятии его должен сразу останавливаться без применения тормозящих устройств.
Исполнительные двигатели являются одним из основных элементов многих схем автоматики и счетно-решающей техники. От их работы в значительной степени зависит качество всей автоматической системы. Исполнительные двигатели почти не работают в номинальном режиме. Для них характерно постоянное изменение скорости, частые пуски, реверсы и остановки. Под номинальной мощностью исполнительного двигателя понимают максимальную мощность, на которую рассчитан двигатель.
К исполнительным двигателям предъявляются следующие основные требования: устойчивость работы, линейность регулировочных и механических характеристик, малая мощность регулирования, большой пусковой момент, отсутствие самохода (двигатели должны сразу тормозиться после снятия сигнала), изменение в широких пределах скорости вращения, быстродействие, надежность, малый вес и габариты.
Вследствие возможности экономичного и удобного регулирования скорости вращения в большом диапазоне специально спроектированные двигатели постоянного тока широко используются как исполнительные. Недостатки исполнительных двигателей постоянного тока связаны с применением коллектора и наличием скользящего контакта. Во взрывоопасных условиях они требуют особой герметизации, а для подавления радиопомех — фильтров.
Исполнительные двигатели конструктивно выполняются так же, как и другие микромашины постоянного тока (см. рис. 2.2), за исключением того, что их магнитную систему полностью набирают из изолированных листов электротехнической стали. Одну из об-
моток двигателя — полюсную или якорную — присоединяют к напряжению сети, которое сохраняется постоянным независимо от вращения якоря. В системах автоматического регулирования обмотку, подключенную на постоянное напряжение сети, называют обмоткой возбуждения. Вторая обмотка, на которую подается сигнал, называется обмоткой управления. Обмоткой управления может быть обмотка полюсов или якорная, в первом случае имеют двигатель с полюсным, во втором — с якорным управлением. В большинстве случаев применяется якорное управление. Двигатели с якорным управлением могут быть выполнены с возбуждением от постоянных магнитов.
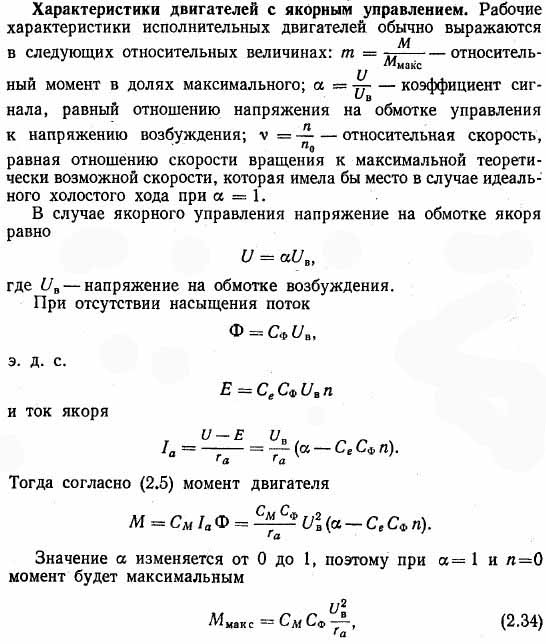
Следовательно,
 Для определения максимальной теоретически возможной скорости вращения подставляем в это уравнение М = 0 и α = 1. Тогда
 Разделив второй член правой части (2.35) на (2.36), получаем
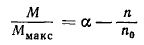 или
 Из (2.37) следует, что вращающий момент исполнительного двигателя с якорным управлением является линейной функцией коэффициента сигнала α и скорости вращения υ (на рис. 2.69 сплошными линиями представлены механические характеристики при различных значениях напряжения на якоре).
Из (2.37) получаем выражение регулировочной характеристики υ = f(α), которая показывает зависимость скорости вращения от изменения сигнала
 Из (2.38) следует, что регулировочные характеристики, исполнительного двигателя с якорным управлением имеют также линейный характер. На рис. 2.70 сплошными линиями представлены регулировочные характеристики при различных значениях момента.
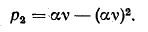
Умножая (2.37) на υ, получаем аналитическое выражение характеристики полной мощности, выраженной в относительных единицах (рис. 2.71), которая показывает зависимость полной механической мощности р2 двигателя от скорости вращения υ
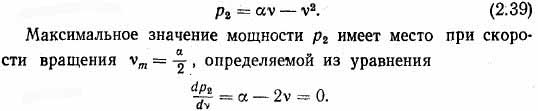 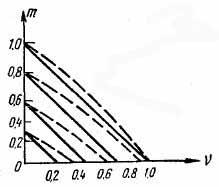
Рис. 2.69. Механические характеристики исполнительного двигателя с якорным управлением
 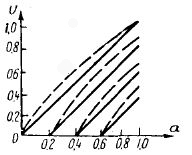
Рис. 2.70. Регулировочные характеристики исполнительного двигателя с якорным управлением
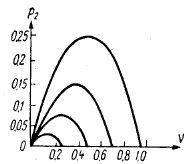 Рис. 2.71. Зависимость полной механической мощности от скорости вращения исполнительного двигателя с якорным управлением
ного исполнительного двигателя при максимальном значении полной механической мощности в два раза меньше, чем скорость при холостом ходе.
Подставляя М = 0 и α = 1, определяем максимальную теоретически возможную скорость вращения
 Подставляя n0 в уравнение (2.40), получим
или
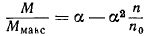
 Из (2.41) следует, что вращающий момент т исполнительного двигателя является нелинейной функцией коэффициента сигнала α. Механические характеристики линейны, но их жесткость (угол наклона) зависит от значения α (рис. 2.72). При увеличении коэффициента сигнала α скорость υ двигателей с полюсным управлением
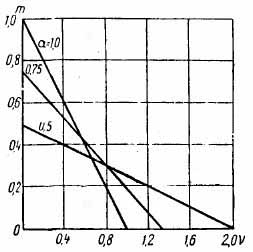 Рис. 2.72. Механические характеристики исполнительного двигателя с полюсным управлением
 Рис. 2.73. Регулировочные характеристики исполнительного двигателя с полюсным управлением
уменьшается, в то время как у двигателей с якорным управлением увеличивается.
Из (2.41) получаем выражение регулировочной характеристики
 Из (2.42) следует, что регулировочные характеристики нелинейны (рис. 2.73). Кроме того, характеристики при m<0,5
являются неоднозначными, так как каждому значению скорости вращения соответствуют два значения коэффициента сигнала. Поэтому полюсное управление двигателей применяется только при значительных нагрузках.
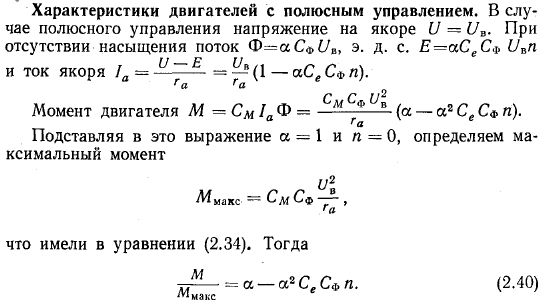
Умножая выражение (2.41) на υ, получаем выражение полной мощности на валу двигателя
 Продифференцировав р2 по υ и приравняв производную нулю, определяем, что скорость, при которой мощность р2 имеет максимальное значение, равна половине максимальной теоретически возможной скорости вращения (рис. 2.74). При этом значение максимальной мощности не зависит от коэффициента сигнала.
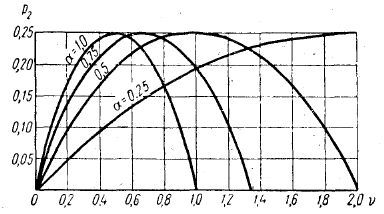 Рис. 2.74. Зависимость полной механической мощности от скорости вращения исполнительного двигателя с полюсным управлением
Основным недостатком полюсного управления является нелинейность регулировочной характеристики, возможность «пригорания» щеток и относительно большая мощность возбуждения.
Постоянные времени. Быстродействие исполнительного двигателя определяется временем, в течение которого с момента подачи сигнала двигатель разгоняется до заданной скорости вращение. Быстродействие характеризуется электромеханической и электромагнитной постоянными времени. Электромеханическая постоянная времени показывает скорость протекания в двигателе механических процессов, электромагнитная постоянная — электромагнитных процессов. При якорном управлении механическая инерционность двигателя значительно больше, поэтому в основном быстродействие определяется электромеханической постоянной времени. При полюсном управлении электромагнитная и электромеханическая постоянные времени у некоторых двигателей соизмеримы по величине.
Электромеханическая постоянная времени Тм определяется временем, в течение которого двигатель получает разгон до теоретически максимальной скорости n0:
 где J — момент инерции (г·см·сек2);
 Согласно (2.43) электромеханическая постоянная времени зависит от момента инерции вращающихся масс, вращающего электромагнитного момента и максимальной скорости вращения. Так как максимальный момент, который имеет место в начальный период пуска двигателей постоянного тока, достаточно велик, то постоянная времени имеет небольшую величину, особенно при относительно большой длине и малом диаметре якоря.
Электромагнитная постоянная времени обмотки управления
 характеризует скорость протекания электромагнитных
переходных процессов в двигателе при изменении коэффициента сигнала. Она значительно больше при полюсном управлении, чем при якорном. В случае якорного управления электромагнитная постоянная времени мала и при оценке быстродействия ею обычно пренебрегают. Лучшее быстродействие является одним из преимуществ якорного управления.
Малоинерционные двигатели с печатными обмотками. В настоящее время следящие системы автоматики имеют настолько малоинерционные элементы, что инерционность исполнительных двигателей становится основным фактором, ограничивающим быстродействие системы. Для улучшения быстродействия двигателей применяется якорь, имеющий легкую тонкостенную основу, выполненную из немагнитного материала, которая лишена стального магнитопровода и поэтому имеет во много раз меньший момент инерции. На поверхности тонкостенного якоря методом травления фольги или электролитического осаждения наносится печатная схема обмотки, проводники которой имеют вид тонких неокруженньгх специальной изоляцией полосок меди. Основа тонкостенного якоря выполняется двух видов: как полый стакан или как легкий диск.
В двигателе с полым якорем стакан 8 помещается между полюсами
7 машины и неподвижным цилиндрическим магнитопроводом 9 (рис. 2.75). Основа стакана полого якоря, на которой крепится обмотка, выполняется из пластмассы. Проводники печатной обмотки якоря располагаются в осевом направлении по обеим сторонам цилиндра стакана. Коллектор имеет обычное исполнение.
В двигателе два воздушных зазора: между полюсом и якорем и между якорем и неподвижным магнитопроводом. Мощность таких двигателей обычно не превышает 30 вт.
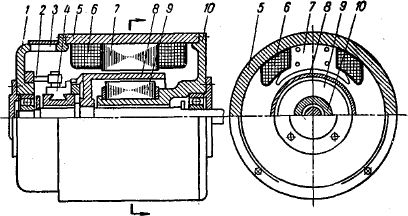 Рис. 2.75. Малоинерционный двигатель постоянного тока с полным якорем: 1 — передний щит; 2 — щеткодержатель и щетка; 3 — крышка смотрового люка; 4 — коллектор; 5 — станина; 6 — обмотка возбуждения; 7 — полюс; 8 — полый якорь; 9 — неподвижный сердечник; 10 — задний щит с выступом для внутреннего статора
В большинстве случаев двигатели с печатной обмоткой выполняются с дисковым якорем 1 (рис. 2.76), который помещается между полюсным наконечником 2 и магнитопроводом 3, выполненным
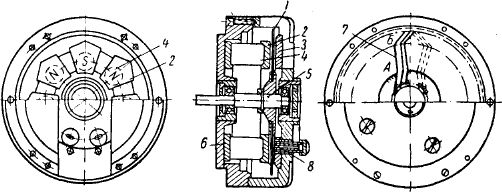 Рис. 2.76. Малоинерционный двигатель постоянного тока с печатной обмоткой: 1 — дисковый якорь; 2 — полюсный наконечник; 3 — магнитопровод; 4 — постоянный магнит; 5 — вал; 6 — магнитопровод; 7 — проводники якоря; 8 — щетки
в виде кольца. Магнитный поток, обычно создаваемый постоянными магнитами 4, проходит через диск 1 в направлении, параллельном оси вала 5, и замыкается по кольцевым магнитопроводам 3 и 6.
Проводники 7 секции обмотки размещаются радиально по обеим сторонам якорного диска. Проводники, расположенные на разных сторонах диска, соединяются гальваническими заклепками через сквозные отверстия. Неокруженные специальной изоляцией проводники печатной обмотки хорошо охлаждаются. Поэтому оказывается возможным в 5÷10 раз и более повысить плотность тока. Для уменьшения лобовых частей обмотки двигатели выполняются многополюсными (обычно
2р = 6—8). Размеры диска ограничивают число активных проводников, которое получается небольшим. Для увеличения напряжения в печатных якорях применяется простая волновая обмотка. Ее положительным свойством является нечувствительность к магнитной несимметрии, которая может иметь место в двигателях с дисковым якорем.
В некоторых случаях для увеличения мощности двигателя применяется двухслойная печатная обмотка, в которой слои разделены электроизоляционной пленкой. Так как толщина проводников и изоляционной пленки незначительна, то условия охлаждения внутреннего и внешнего слоев почти одинаковы.
Для предохранения обмотки от механических повреждений поверхности полюсных наконечников и кольцевого магнитопровода, между которыми размещается якорный диск, тщательно шлифуются. В двигателях некоторых исполнений полюсные наконечники имеют пятиугольную форму, выступающую за внешние лобовые части обмотки, которые в этом случае также являются активными проводниками. Магнитная система, у которой полюса расположены на одной стороне диска, называется несимметричной. Иногда применяют симметричную магнитную систему, у которой полюса расположены по обе стороны диска. В маломощных двигателях в основном применяется несимметричная магнитная система. В некоторых случаях применяется возбуждение не от постоянных магнитов, а электромагнитное.
Обычно дисковый двигатель не имеет специального коллектора, а щетки 8 соприкасаются непосредственно с проводниками 7 (рис. 2.76) на внутренних лобовых частях обмотки, расположенной на одной стороне диска. Двигатели с дисковым якорем изготовляются на мощности от 5 вт до 5 квт.
Для улучшения торможения двигателя после снятия сигнала якорный диск иногда делают из алюминия. Возникающие в диске вихревые токи создают тормозной момент, пропорциональный скорости вращения. Такие двигатели обладают высоким начальным ускорением. Их пуск и остановка могут производиться до 100 раз в секунду. Тормозной момент диска в 10—15 раз снижает установившуюся скорость вращения (рис. 2.77). Во сколько же приблизительно раз снижается постоянная времени, которая при сильном демпфирующем эффекте может иметь порядок миллисекунды?
К недостаткам дисковых двигателей с печатной обмоткой следует отнести их сравнительную недолговечность, которая обуслов-
ливается главным образом стиранием печатных проводников в месте их соприкосновения со щетками. Для повышения износоустойчивости в местах контакта со щеткой проводники покрываются слоем радия или паладия в несколько микрон. Иногда для увеличения долговечности работы двигателя применяют коллектор специального исполнения.
Двигатели с печатной схемой обмотки обладают высокими динамическими качествами. Вследствие малого момента инерции они достигают ускорения до 50 000 рад/сек2,, что является недостижимым для машин другого исполнения.
Так как в якоре нет стального магнитопровода, то реакция якоря и индуктивность проводников якоря весьма малы. Это значительно облегчает коммутацию. Лучшие условия коммутации позволяют применять серебряно-графитные щетки с малым падением напряжения в переходном контакте.
Якорь двигателя с печатной обмоткой не имеет зубцов, поэтому индукция в зазоре распределяется более равномерно, в результате чего уменьшаются пульсационные потери и шум. Вибрации в подшипниках и небаланс ротора ввиду легкости якоря сведены к минимуму, что также уменьшает шум при работе двигателя.
Изготовление якоря с печатной схемой обмотки может быть легко автоматизировано, в то время как укладка обмотки якоря обычного исполнения плохо, поддается автоматизации. Трудоемкость автоматизированного изготовления печатного якоря при массовом производстве невелика, а стоимость материалов мала. Поэтому двигатели с печатными обмотками могут использоваться не только как исполнительные, но и с длительно установившимся режимом работы.
Вследствие отсутствия потерь в стали, а при постоянных магнитах и потерь на возбуждение, к. п. д. двигателей относительно высок (при Р = 30 вт η = 65%).
К недостаткам двигателей с печатными обмотками следует отнести большой зазор, величина которого состоит из толщины основы немагнитного якоря, двойной толщины печатных проводников и двойной толщины воздушных промежутков. Для создания достаточной магнитной индукции в зазоре требуется большая энергия возбуждения, что приводит к увеличению габаритов и веса двигателей с печатными обмотками.
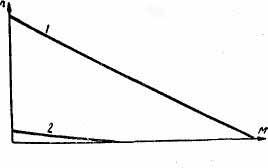 Рис. 2.77. Механические характеристики двигателя с печатной обмоткой: 1 — немагнитный диск из изоляционного материала; 2 — алюминиевый диск
ВОПРОСЫ
1. Может ли обыкновенный двигатель постоянного тока работать в системах автоматического регулирования как исполнительный? Чем различаются режимы работы исполнительного и обычного двигателей? Почему исполнительные двигатели делают с ненасыщенной магнитной системой?
2. Почему наиболее распространенным является якорное управление? В каких случаях применяется полюсное управление? В каком соотношении находятся электромеханическая и электромагнитная постоянные времени? Почему при полюсном управлении коэффициент сигнала влияет на постоянную времени?
3. Что такое коэффициент сигнала? Как влияет увеличение коэффициента сигнала на скорость вращения двигателей при якорном и полюсном управлении? Как влияет увеличение коэффициента сигнала на пусковой момент двигателей при якорном и полюсном управлении?
4. Почему двигатели с печатной схемой обмотки имеют малый момент инерции? В чем состоит отличие печатной обмотки от обычной? В чем состоит конструктивное отличие двигателя с печатной обмоткой, имеющего якорь в виде диска, от двигателя с полым якорем? Для каких целей иногда диск якоря с печатной обмоткой делают из алюминия?
Содержание Главная (библиотека)
Предыдущий § Следущий
| 